![3DR Radio V5 Telemetry, [4] [1] [2] [3] Radio Talemet](https://rcdrone.top/cdn/shop/files/Se888e7b6abd54def8a6cc8819de18cf6Q.webp?v=1714815991)
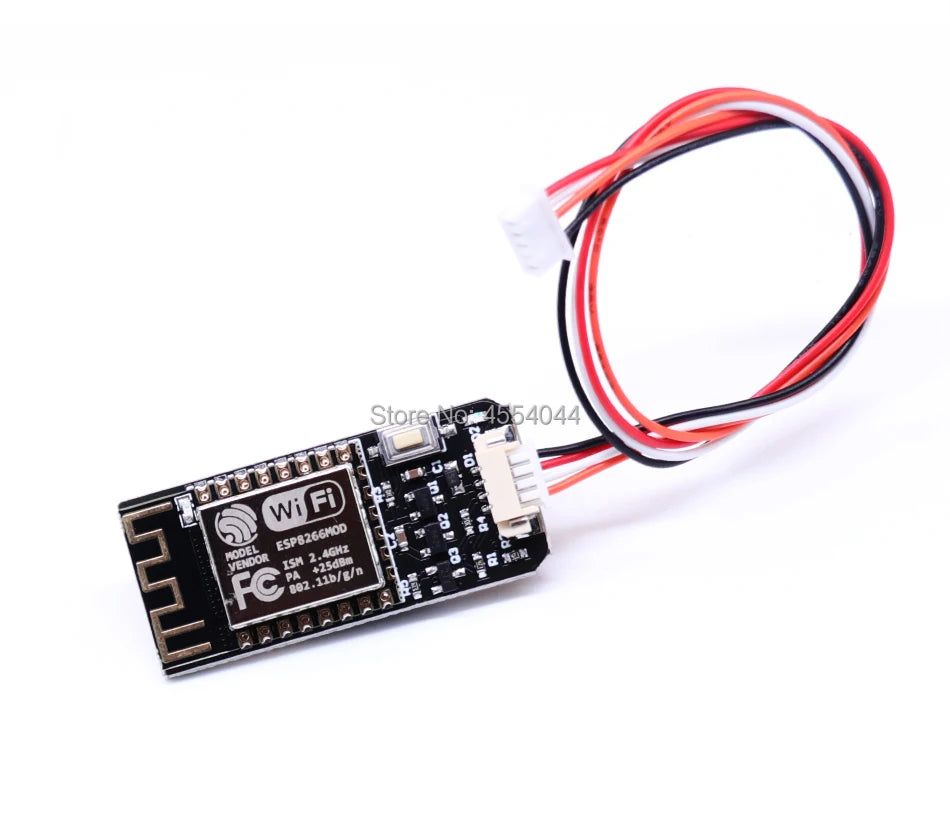










1.utilizza la linea 6P per collegarsi al controller di volo pixhawk.
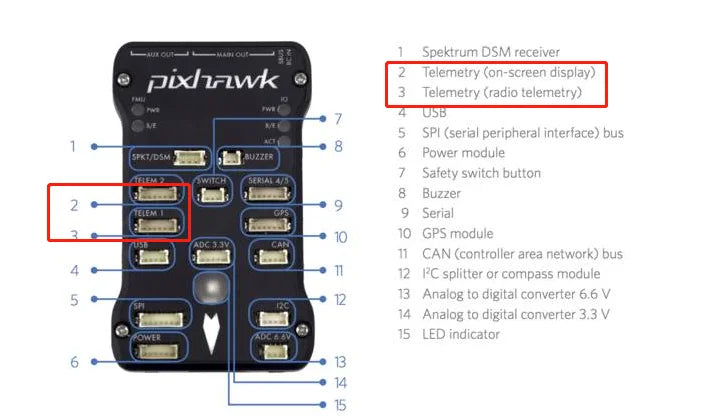
A causa dei diversi firmware, alcuni firmware possono utilizzare due porte, altri firmware possono utilizzare solo una delle porte. Quindi trova una delle porte disponibili per la connessione.
SE si utilizza il firmware PX4, è possibile utilizzare solo TELEM1, non è possibile utilizzare TELEM2.
SE utilizzi il firmware ardupilot, trova una delle porte disponibili per la connessione.
2.Nota:
-
Quando si utilizza la connessione radiotelemetrica, è necessario utilizzare il modulo di alimentazione 3DR o l'ESC 5V per fornire alimentazione al controllo di volo. Impossibile inserire l'USB perché la priorità USB è superiore alla radiotelemetria. Sese il cavo USB è collegato, non può essere utilizzato per la trasmissione radiotelemetrica.
-
La velocità di trasmissione predefinita della radiotelemetria è 57600, non 115200. Seleziona la porta COM corretta e non seleziona AUTO. -
Se si verifica un problema con il driver, scaricalo da qui:pix.rctoysky.com/CP210x_VCP_Windows.rar