




OddityRC Vortex F80 80A 3-8S ESC Singolo (AM32/HF32) Brushless, AT32F421, BEC 5V 3A, Telemetria
OddityRC Vortex F80 80A 3-8S ESC Singolo (AM32/HF32) Brushless, AT32F421, BEC 5V 3A, Telemetria
OddityRC
Prezzo di listino
$31.59 USD
Prezzo di listino
Prezzo scontato
$31.59 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
Il OddityRC Vortex F80 è un ESC singolo da 80A 3-8S per motori brushless (BLDC), con opzioni di firmware AM32 o HF32. In generale, il firmware AM32 è migliore per i crawler, mentre l'HF32 è migliore per aerei e multirotori—si prega di selezionare in base alle proprie esigenze.
Caratteristiche principali
- Design hardware OddityRC con un PCB a 6 strati e uno spessore di rame di 3oz (interno ed esterno)
- Design MOS metallico per prestazioni termiche migliorate e gestione di alta corrente
- MCU AT32F421 (frequenza principale fino a 120MHz), kernel ARM Cortex-M4
- Supporto per telemetria
- 5V 3A BEC
- Protocolli: DShot300, DShot600, PWM (HF32 non supporta PWM), ecc.
Specifiche
| Nome articolo | OddityRC AM32/HF32 80A ESC senza spazzole |
| Firmware | AM32 / HF32 (opzionale) |
| Protocollo | DShot300, DShot600, PWM (HF32 non supporta PWM), ecc. |
| Telemetria | Supporto |
| BEC | 5V 3A |
| MCU | AT32F421 (fino a 120MHz di velocità operativa) |
| Kernel | ARM Cortex-M4 |
| Memoria | Supporta fino a 64KB di memoria flash (Flash) e 16KB |
| Temperatura di lavoro | -40 a 70°C |
| Corrente continua | 80A |
| Corrente di picco | 90A (Istantanea) |
| Potenza di picco | 2000W (Istantanea) |
| Voltaggio | 10.8V-33.6V (3-8S) batteria LiPo |
| scheda PCB | scheda a 6 strati con uno spessore di rame di 3oz all'interno e all'esterno |
| Dimensione | 36,2 x 24,3mm |
| Colore | Nero |
Opzioni firmware & Note
- AM32 è progettato specificamente per processori ARM a 32 bit per controllare motori BLDC, con avvio rapido fluido e acceleratore lineare.
- HF32 è progettato per ESC di motori BLDC a 32 bit destinati a motori senza spazzole in multirotori ad alte prestazioni.
- HF32 può essere programmato su un ESC con firmware AM32, ma AM32 non può essere programmato su un ESC HF32.
Caratteristiche AM32
- Frequenza PWM variabile
- Modalità di avvio a onda sinusoidale
Caratteristiche HF32
- Protocollo di segnale digitale: DShot150, DShot300 e DShot600
- DShot bidirezionale: telemetria RPM
- Alta prestazione: bassa interferenza nella comunicazione
- Ramping PWM più fluido
- Melodie di avvio configurabili dall'utente
- Numerose ottimizzazioni e correzioni di bug
Note sul cablaggio / Pin
- Punto di segnale S: segnale di controllo ESC in funzione; protocollo PWM/DSHOT; può essere sintonizzato online utilizzando il controllo di volo.
- Punto di flash del firmware è fornito per il flashing del firmware.
- Un diagramma di cablaggio è etichettato “DIAGRAMMA AM32 80A” e mostra le connessioni a un FC e LIPO 4-8S (etichetta del diagramma), con etichette FC che includono S1, S2, S3, S4, 5V, GND, BAT .
Applicazioni
Questioni da considerare
- Quando si opera con corrente continua elevata, fornire una buona dissipazione del calore per l'ESC.
- Se l'ESC non può funzionare dopo aver impostato i parametri, ripristinare i parametri dell'ESC ai valori predefiniti e regolare nuovamente i parametri.
Cosa è incluso
- 1 pezzo di firmware AM32/HF32 ESC singolo
- 1 pezzo di dissipatore di calore in alluminio
- 2 pezzi di condensatore elettrolitico ad alta frequenza da 35V 1000uf
- 1 pezzo di cavo di alimentazione con spina XT60
- 1 pezzo di cavo di segnale
Manuali / Risorse
- Wiki AM32: https://github.com/AlkaMotors/AM32-MultiRotor-ESC-firmware/wiki/Crawler-Hardware-and-AM32
- Sito Web HF32: https://hf32.neutron-rc.com/
- HF32 GitHub: https://github.com/ICpachong/HF32
Per selezione del prodotto, aiuto per il cablaggio o supporto post-vendita, contattare https://rcdrone.top/ o inviare un'email a [email protected].
Dettagli

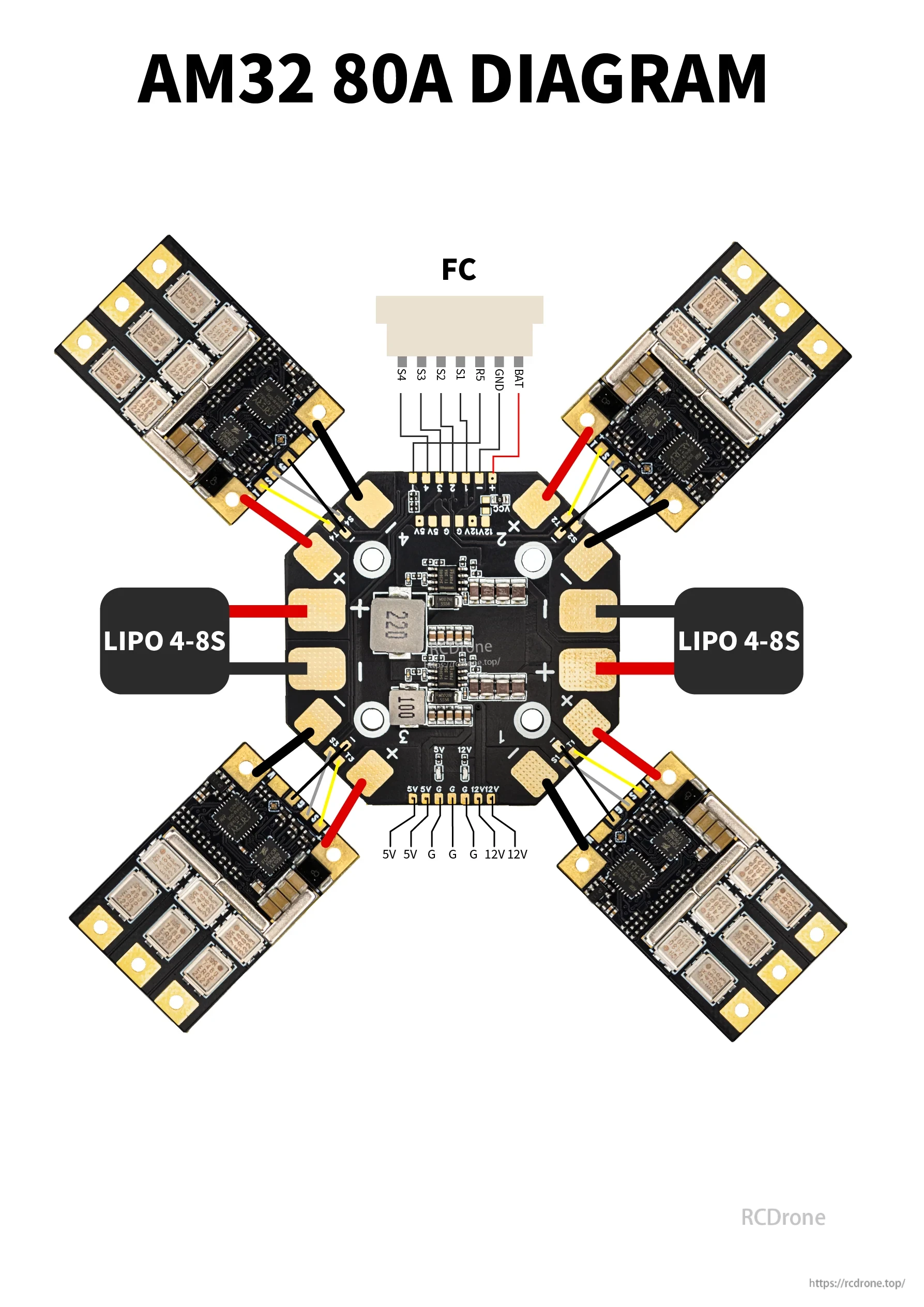
Schema di cablaggio chiaro per collegare più ESC singoli a un controllore di volo, con alimentazione e segnale/terra da 4–8S LiPo.
Related Collections






