

















SteadyWin GIM3505-8 Motore Riduttore Planetario Integrato — Modulo Articolazione Robot Quadrupede, Ingranaggio 8:1, 24V, CAN, IP54
SteadyWin GIM3505-8 Motore Riduttore Planetario Integrato — Modulo Articolazione Robot Quadrupede, Ingranaggio 8:1, 24V, CAN, IP54
SteadyWin
Prezzo di listino
$80.00 USD
Prezzo di listino
$90.00 USD
Prezzo scontato
$80.00 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
Il modulo articolare del robot quadrupede SteadyWin GIM3505-8 è progettato per giunti robotici compatti e assemblaggi di attuatori. Il GIM3505-8 integra un riduttore planetario 8:1 con un motore senza spazzole e opzioni di driver a bordo per fornire movimento controllato per robot quadrupedi, bracci robotici, giunti umanoidi e sistemi meccatronici simili.
Caratteristiche principali
- Avanzato sistema di ingranaggi planetari per bassa retroazione e movimento fluido (retroazione degli ingranaggi: 15 arcmin).
- Ampia adattabilità di tensione: tensione nominale 24 V con un intervallo operativo di 12~48 V.
- Alta densità di coppia ed efficienza: costante di coppia 0.52 N·m/A con coppia nominale 0.65 N·m e coppia di picco 1.27 N·m.
- Ingombro compatto: Ø43 × 23.6 mm (senza driver); Ø43 × 30 mm (con driver).
- Protezioni di sicurezza integrate: protezioni da sovratemperatura, sovratensione e sovraccarico (protezione a tre strati indicata nella documentazione del prodotto).
- Interfaccia di comunicazione CAN; supporta encoder separato e freno personalizzato opzionale.
Specifiche
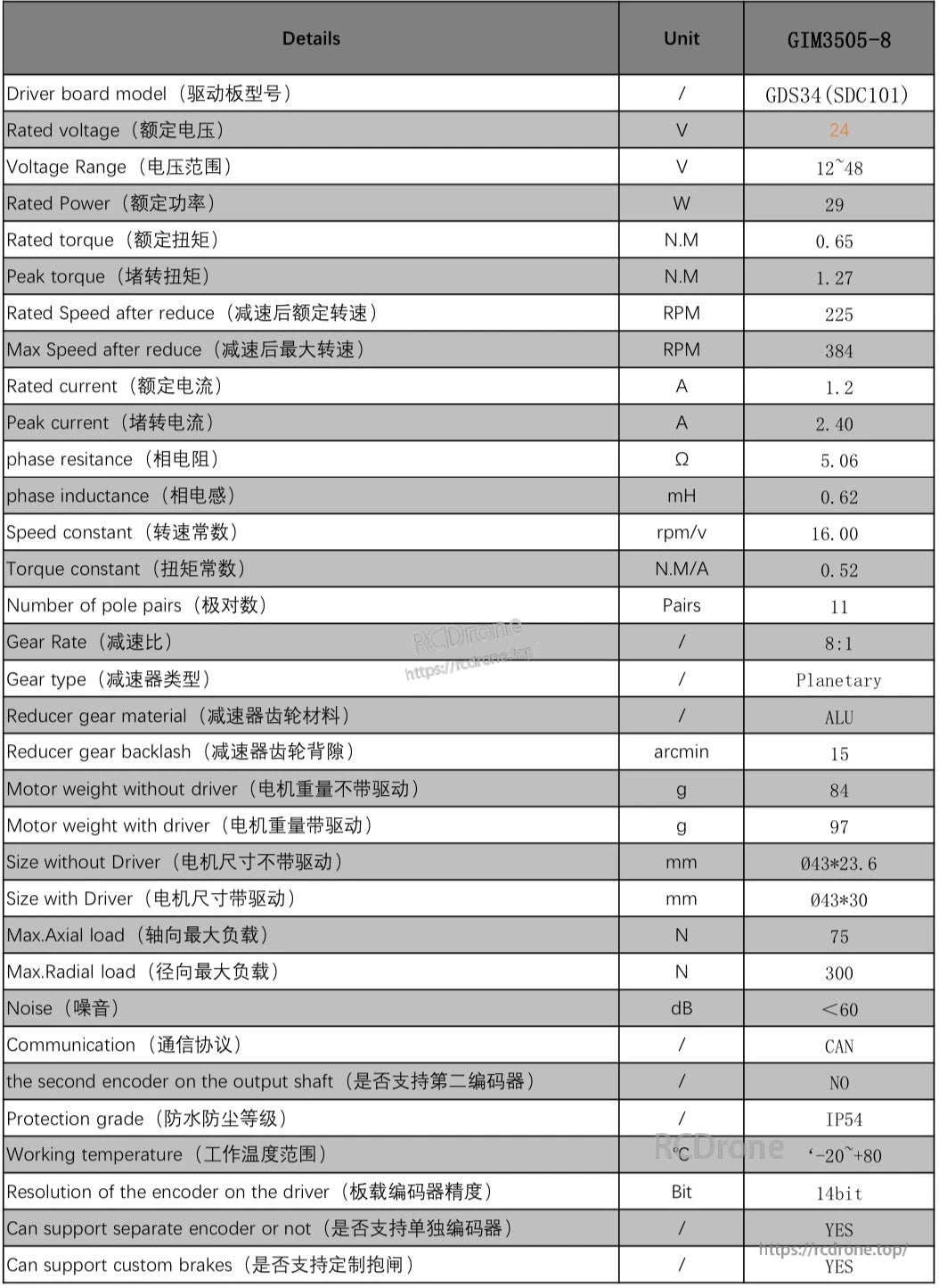
Parametro Valore ---------------------------------------- -------------------------- Modello GIM3505-8 Modello della scheda driver GDS34 (SDC101) Tensione nominale 24 V Intervallo di tensione 12~48 V Potenza nominale 29 W Coppia nominale 0.65 N·m Coppia di picco (bloccaggio) 1.27 N·m Velocità nominale dopo riduzione 225 RPM Velocità massima dopo riduzione 384 RPM Corrente nominale 1.2 A Corrente di picco (bloccaggio) 2.4 A Resistenza di fase 5.06 Ω Induttanza di fase 0.62 mH Costante di velocità 16 rpm/V Costante di coppia 0.52 N·m/A Numero di coppie di poli 11 coppie Rapporto di trasmissione 8:1 Tipo di ingranaggio Planetario Materiale dell'ingranaggio riduttore ALU Gioco dell'ingranaggio riduttore 15 arcmin Peso del motore (senza driver) 84 g Peso del motore (con driver) 97 g Dimensioni (senza driver) Ø43*23.6 mm Dimensione (con driver) Ø43*30 mm Carico assiale massimo 75 N Carico radiale massimo 300 N Rumore <60 dB Comunicazione CAN Secondo encoder sull'albero di uscita NO Grado di protezione IP54 Temperatura di esercizio -20°C a +80°C Risoluzione dell'encoder sul driver 14 Bit Supporto per encoder separato SÌ Supporto per freno personalizzato SÌ
Applicazioni
- Robot quadrupedi (giunti e attuatori delle gambe)
- Giunti di robot umanoidi
- Bracci robotici e manipolatori
- Attuatori per esoscheletri
- Moduli di sterzo e articolazione AGV/AMR
- Progetti di robotica autonoma per ricerca e università
Per assistenza clienti e richieste tecniche, contattare [email protected].
Manuali
- GlM3505-8_disegno_di_installazione.pdf
- GlM3505-8_con_disegno_di_installazione_driver.pdf
- GIM3505-8.stp
Dettagli


SteadyWin specifiche del giunto GIM3505-8: 24V, 29W, coppia di 0.65N.M, ingranaggio planetario, comunicazione CAN, grado di protezione IP54, supporta freni personalizzati e encoder separati, opera da -20°C a +80°C.
Related Collections

















