




CEREBOTO OpenArm Kit Braccio Robotico 7DOF – Fai-da-te o Preassemblato, Controllo Open-Source ROS/Python
CEREBOTO OpenArm Kit Braccio Robotico 7DOF – Fai-da-te o Preassemblato, Controllo Open-Source ROS/Python
CEREBOTO
Impossibile caricare la disponibilità di ritiro
Panoramica
Il braccio robotico CEREBOTO OpenArm 7DOF è un braccio robotico di livello di ricerca, in scala umana, progettato per università, laboratori, startup e maker seri. Con 7 gradi di libertà, un raggio d'azione del braccio di 633 mm, un carico utile tipico di 4,1 kg e un carico utile massimo di 6,0 kg per braccio, OpenArm offre un movimento ad alta precisione, interazione fisica sicura e strumenti open-source ricchi.
Puoi scegliere un kit hardware fai-da-te per un'assemblaggio completo, o un braccio finito, calibrato in fabbrica e pronto all'uso. Sono disponibili configurazioni a braccio singolo, a doppio braccio e a braccio quadruplo.
Caratteristiche principali
-
Braccio robotico 7DOF in scala umana – progettato per corrispondere a una lunghezza del braccio umano di 160–165 cm per una manipolazione naturale e teleoperazione.
-
Alto carico utile &e stabilità – carico utile tipico 4,1 kg, carico utile massimo 6,0 kg per braccio, con un peso del braccio leggero di 5,5 kg.
-
Motori retroazionabili &e struttura conforme – interazione sicura e fluida per la collaborazione uomo-robot e compiti controllati dalla forza.
-
Loop di controllo CAN-FD a 1 kHz – controllo in tempo reale a bassa latenza per applicazioni di ricerca ad alte prestazioni e di livello industriale.
-
Costruzione interamente in metallo – struttura principale robusta in lega di alluminio e acciaio inossidabile per rigidità e durata.
-
Hardware &e software open-source – CAD, PCB, firmware e software di controllo aperti per una personalizzazione profonda.
-
Supporto per ROS, Python e C++ – integrazione ufficiale di ROS più API Python/C++ per lo sviluppo rapido di algoritmi.
-
Ecosistema ricco ed espansione – supporta mani robotiche agili, guanti per motion capture e basi mobili per piattaforme robotiche complete.
Specifiche Tecniche
-
Gradi di Libertà: 7 DOF per braccio
-
Portata del Braccio: 633 mm
-
Carico Utile Tipico: 4.1 kg
-
Carico Utile Massimo: 6.0 kg per braccio
-
Peso del Braccio: circa 5.5 kg per braccio
-
Materiali: Parti strutturali in lega di alluminio e acciaio inossidabile
-
Interfaccia di Controllo: CAN / CAN-FD, UART (tramite adattatore USB2CANFD-X2 incluso nelle versioni a braccio doppio/quadruplice)
-
Frequenza di Controllo: fino a 1 kHz ciclo CAN-FD
-
Supporto Software: framework ROS, API Python, API C++
-
Ergonomia: lunghezza del braccio adatta a utenti con altezza corporea di 160–165 cm
Software &e Ecosistema Open-Source
OpenArm è una piattaforma di braccio robotico completamente open-source.Le risorse ufficiali includono:
-
Sito web: openarm.dev
-
Documentazione: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Video tutorial: guida ufficiale di YouTube per iniziare
Con file CAD, PCB e firmware aperti, puoi modificare meccaniche, elettronica e software di controllo, o estendere il braccio con nuovi sensori e attuatori per i tuoi argomenti di ricerca.
Scenari di Applicazione Tipici
OpenArm è progettato come una piattaforma di ricerca e insegnamento versatile e ad alta precisione per:
-
Corsi di robotica universitaria e esperimenti di laboratorio
-
Istituti di ricerca e progetti di laboratorio
-
Ricerca sull'apprendimento per rinforzo e sull'IA basata sulla fisica
-
Interazione uomo-robot e studi sui robot collaborativi
-
Spazi per maker e team di hardware open-source
-
Piattaforme di educazione e formazione ingegneristica
Con le sue dimensioni in scala umana e l'attuazione conforme, OpenArm è ideale per la manipolazione, la teleoperazione, l'apprendimento per imitazione, la robotica assistiva e altro ancora.
Versioni del Prodotto &e Configurazioni
Versione 1 – Kit Hardware Fai-da-te
-
Per utenti con forti abilità pratiche che vogliono comprendere a fondo la struttura meccanica.
-
Include tutte le parti meccaniche, elettriche e stampate in 3D; assembli e calibra il braccio da solo seguendo il manuale.
Versione 2 – Braccio Robotico Finito
-
Per istituti di ricerca, laboratori, aziende ed educatori che necessitano di una piattaforma plug-and-play.
-
Completamente assemblato, sintonizzato e calibrato prima della spedizione; pronto all'uso appena estratto dalla scatola.
Configurazioni degli arti disponibili (a seconda dell'elenco):
-
Kit Fai-da-te – Braccio Singolo
-
Braccio Finito – Braccio Singolo
-
Kit Fai-da-te – Doppio Braccio
-
Braccia Finitte – Doppio Braccio
-
Kit Fai-da-te – Quattro Bracci
-
Braccia Finitte – Quattro Bracci
Contenuto della Confezione
Ogni kit OpenArm o sistema finito include tipicamente:
-
Componenti strutturali principali in lega di alluminio e acciaio inossidabile
-
Motori, schede di controllo, alimentatore e cavi
-
Parti stampate in 3D e set di viti
Versioni a doppio braccio e a quattro bracci: un dispositivo USB2CANFD-X2 ufficiale compatibile con BOM (CEREBOTO è l'agente autorizzato nazionale) per la comunicazione PC-to-CAN-FD.
Estensioni hardware supportate
OpenArm supporta più componenti hardware aggiuntivi (venduti separatamente), consentendoti di costruire un sistema robotico completo:
-
Mano robotica dexterous – per la manipolazione fine e la ricerca sulla presa.
-
Set di guanti per cattura del movimento – per teleoperazione intuitiva e apprendimento per imitazione.
-
Base mobile – per trasformare OpenArm in una piattaforma di manipolazione mobile.
FAQ
Q: Il braccio robotico può essere utilizzato immediatamente?
A: La versione finita del braccio è completamente sintonizzata e calibrata in fabbrica: basta accenderlo e iniziare a lavorare. Il kit hardware fai-da-te richiede di assemblare e configurare il sistema seguendo le istruzioni.
Q: OpenArm è compatibile con ROS o altri middleware?
A: Sì. OpenArm supporta ufficialmente il framework ROS e puoi anche controllare il braccio tramite API Python e C++.
Q: A chi è destinato questo prodotto?
A: Ricercatori universitari e di istituti, laboratori di AI &e robotica, corsi di insegnamento, centri di formazione ingegneristica e hobbisti avanzati.
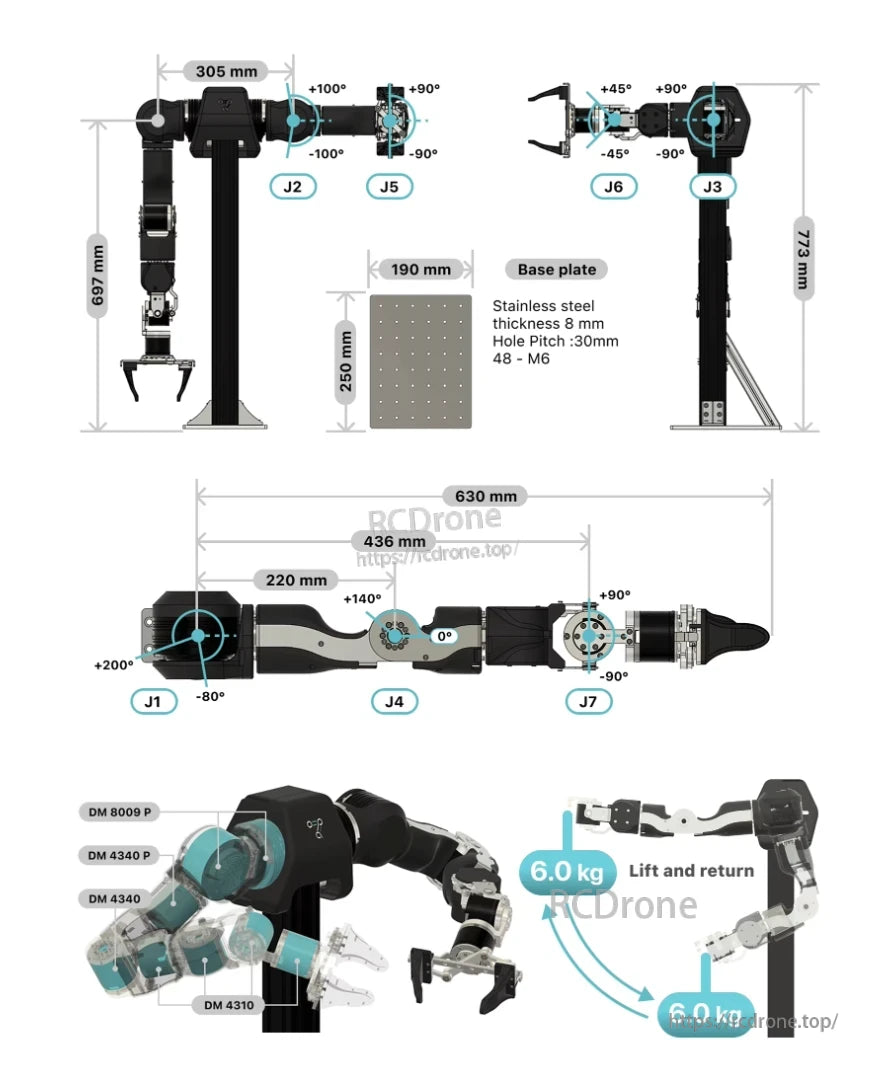
Il braccio robotico Cereboto OpenArm 7DOF ha sette giunti (J1–J7) con intervalli angolari definiti. È alto 697 mm o 773 mm, raggiunge 630 mm e si monta su una piastra base in acciaio inossidabile di 190×250 mm—spessa 8 mm con 48 fori M6 distanziati a passo di 30 mm. Azionato da motori DM8009P, DM4340P, DM4340 e DM4310, gestisce carichi utili di 6,0 kg con precisione. Progettato per uso industriale e di ricerca, bilancia robustezza strutturale con controllo del movimento accurato.

Related Collections



