Pilota automatico controllore di volo HEX Pixhawk 2.1 PX4 PIX a 32 bit - The Cube Orange + set standard con qui 3 GPS e scheda portante ADS-B
Pilota automatico controllore di volo HEX Pixhawk 2.1 PX4 PIX a 32 bit - The Cube Orange + set standard con qui 3 GPS e scheda portante ADS-B
RCDrone
Impossibile caricare la disponibilità di ritiro
SPECIFICHE
Interasse: Viti
Utilizzo: Veicoli e giocattoli telecomandati
Parti/accessori di aggiornamento: Braccio
Forniture di strumenti: Classe assemblata
Parametri tecnici: Valore 2
Dimensione: 1
Periferiche/dispositivi di controllo remoto: Servi
Età consigliata: 12+y
RC Parti e accessori: Servi
Quantità: 1 pz
Origine: Cina continentale
Numero modello: HEX-CUBE+
Materiale: Metallo
Attributi trazione integrale: Assemblaggio
Per tipo di veicolo: Automobili
Certificazione: CE
Marchio: Feetech
Nota: la differenza tra Cube Orange e Cube Orange+ è che Cube Orange può essere aggiornato al firmware PX4, mentre Cube Orange+ non supporta l'aggiornamento del firmware PX4
Per ulteriori informazioni, visitare il sito Web ufficiale:https://docs.cubepilot.org/user-guides/autopilot/the-cube-module-overview
Caratteristiche
- Supporta modalità multiple come vagabondaggio, mantenimento dell'altitudine, modalità (con waypoint), modalità seguito, ecc.
- Supporta Mission Planner e stazioni di controllo a terra QGroundControl
- Volo integrato logging
- Trasmissione dei dati di volo in tempo reale
- Supporta l'elusione degli oggetti a 360 gradi
- Dotato di processore H7 ad alte prestazioni
H7 ha doppio- FPU di precisione (DP), 1 MB di RAM e processore CPU da 400 MHz offrono prestazioni elevate, funzionamento estremamente veloce e una soluzione stabile per il volo.
- Consapevolezza situazionale tramite ADS-B integrato
A 1090 MHz personalizzato Il ricevitore ADS-B di uAvionix è stato integrato nella nuova scheda portante ADS-B. Ciò fornisce una nuova funzione senza incremento delle dimensioni. Gli UAV equipaggiati con la nuova scheda portante possono ricevere l'assetto degli aerei commerciali con equipaggio all'interno della portata dell'ADS-B. Ciò informa efficacemente l'operatore UAS per consentirgli di valutare i rischi relativi al funzionamento corrente.
Facile commutazione della tensione del segnale di uscita PWM
L'uscita PWM supporta la commutazione tra i livelli di segnale 3,3 V e 5 V. La commutazione della tensione può essere effettuata tramite il software della stazione di controllo a terra. Ciò migliora la compatibilità con varie periferiche esterne.
Supporto per più tipi di veicoli: inclusi elicotteri, multicotteri, ali fisse, VTOL, rover, barche, sottomarini, ecc.
Dettagli prodotto
Processore principale: STM32H757(Il nuovo chip ha buone prestazioni)
Coprocessore: STM32F1
Segnali RC supportati: PPM/SBUS/DSM
Ridondanza di alimentazione: Ridondanza tripla
Sensori: Tripla Sistema IMU
Dettagli sensori: ICM20649 (accelerometro+giroscopio integrato)
ICM20602 (accelerometro+giroscopio integrato)
ICM20948 (accelerometro+giro+magnetometro integrati)
MS5611 x 2 (Baro)
Firmware : Firmware del controller di volo open source PX4 non supportato
Tipi di veicoli supportati: aerei ad ala fissa, elicotteri con 3-8 motori, elicotteri, aerei VTOL, rover/barche/sottomarini
Peso: 73 g
Materiale del telaio : Lega di alluminio CNC (cubo) + modanatura ABS (scheda portante)
Dimensioni cubo: 38,4x38,4x22 mm
Scheda portante: 94,5x44,3x17,5 mm.3mm
Temperatura operativa:-10~+55° IMU con controllo della temperatura
I/O PWM:14
Interfaccia seriale Mavlink:2
Numero di GPS supportati:2
Interfaccia di debug:1
Interfaccia I2C: 1
Interfaccia CAN: 2
Qui3
GNSS: Sì
Bussola: Sì
Protocollo: CAN
Sistema operativo in tempo reale: Sì
Aggiornamento firmware: Sì
RTK: Sì
A prova di polvere e schizzi d'acqua: Sì
Tipo di ricevitore: moduli GNSS ad alta precisione u-blox M8 (M8P)
Costellazione satellitare:GPS L1C/A, GLONASS L1OF, BeiDou B1I
Precisione di posizionamento: 3D FIX: 2,5 m / RTK: 0,025 m
Processore: STM32F302
Snesor IMU:ICM20948
Frequenza di aggiornamento navigazione: Max 8 Hz
Protocollo di comunicazione:CAN
Temperatura operativa: da -40°C a 85°C
Dimensioni:76 mm x 76 mm x 16,6 mm
Peso: 48,8 g





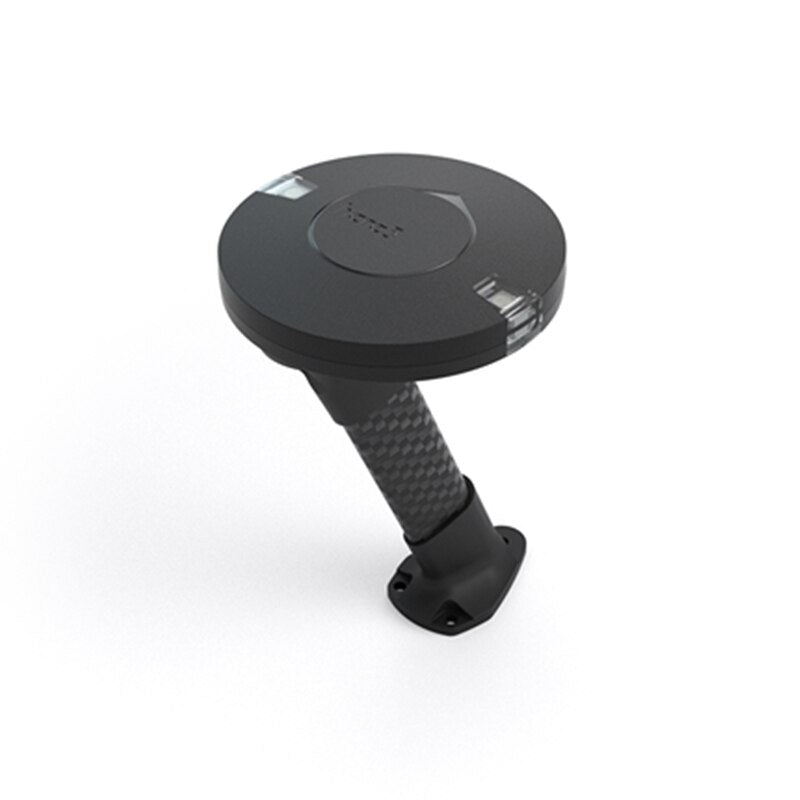
HEX Pixhawk 2.1 di PX4 è l'autopilota più avanzato al mondo per veicoli autonomi aperti senza pilota. Questo controller a forma di cubo presenta componenti ridondanti, a temperatura controllata e isolati.
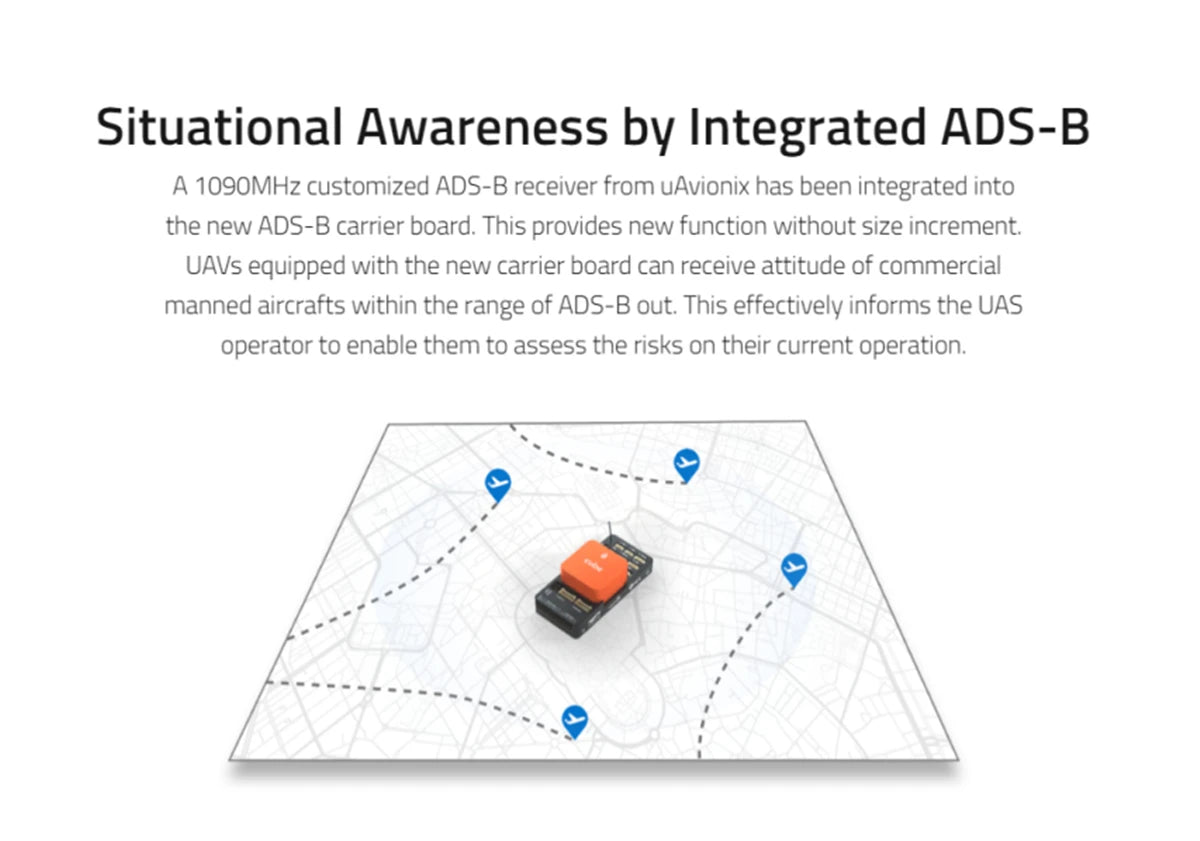
La scheda portante è dotata di un ricevitore ADS-B personalizzato di uAvionix, funzionante a 1090 MHz, che consente agli operatori UAS di valutare i potenziali rischi nelle loro operazioni attuali.

L'uscita PWM supporta la commutazione tra i livelli di segnale 3,3 V e 5 V, consentendo di utilizzare il software della stazione di controllo a terra per commutare tra questi due livelli di tensione.
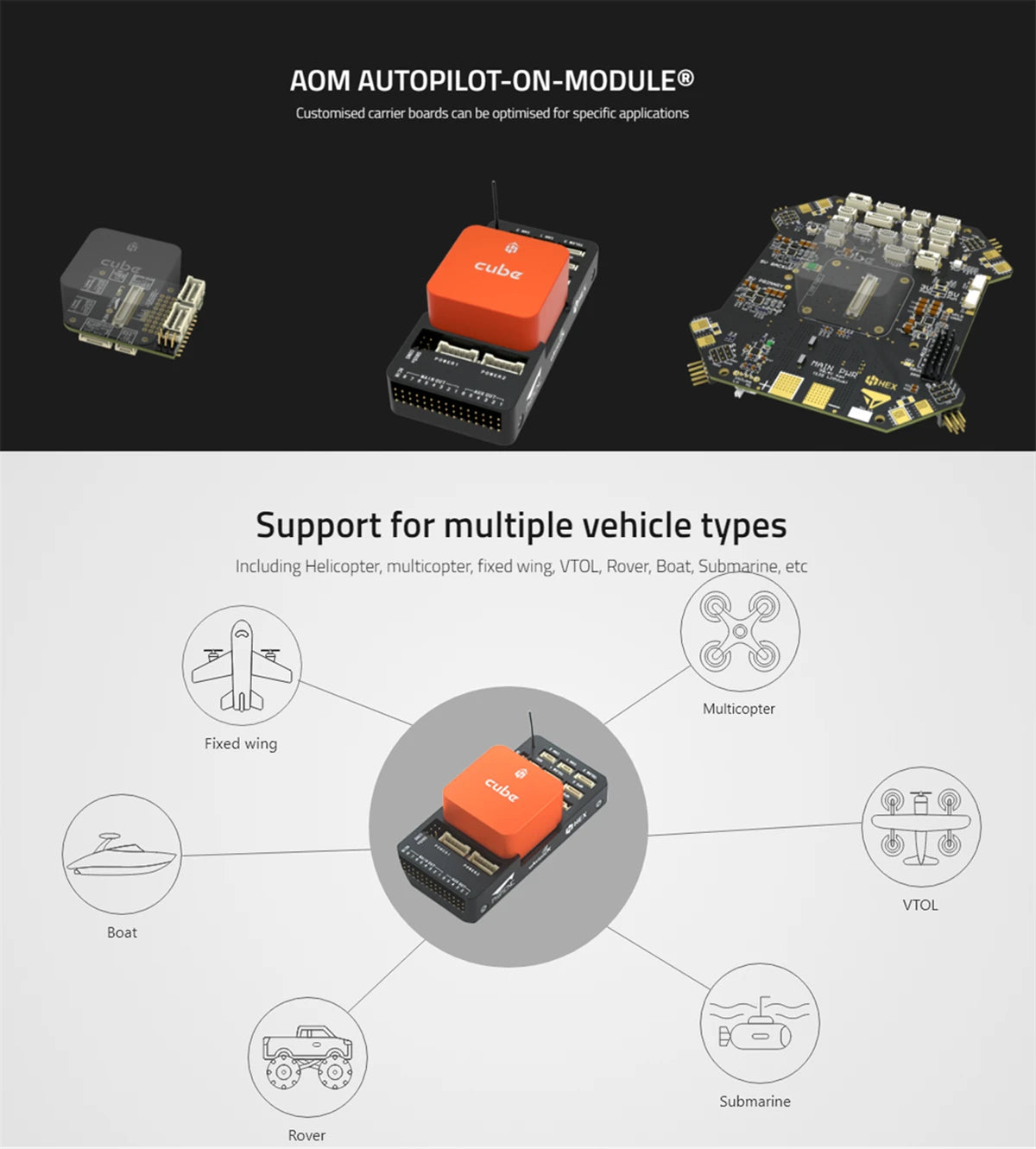
L'APM (Autopilot-on-Module) offre schede portanti personalizzate che possono essere ottimizzate per applicazioni specifiche, supportando diversi tipi di veicoli tra cui elicotteri, multi-elicotteri, aerei ad ala fissa, VTOL, rover, barche, sottomarini e molti altri.
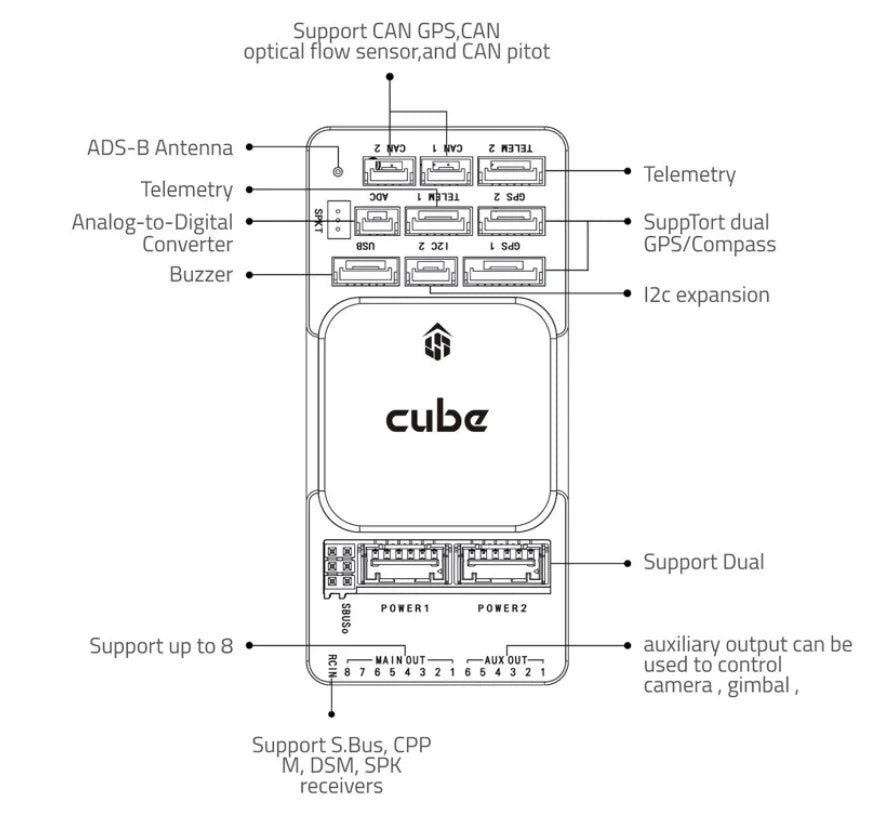
Questo controller di volo supporta varie periferiche, tra cui: * Bus CAN per GPS, sensore di flusso ottico e dati di Pitot * Antenna ADS-B per una navigazione migliorata * Funzionalità di telemetria con conversione analogico-digitale SD9 * Funzionalità di espansione I2C per sensori o dispositivi aggiuntivi * Opzioni di doppia alimentazione per ridondanza * Fino a 8 uscite ausiliarie che possono essere utilizzate per controllare vari dispositivi, come: + 6 telecamere o gimbal tramite protocollo S-Bus

Questo controller di volo presenta un design aggiornato con resistenza all'acqua, che lo rende adatto all'uso in vari ambienti. Inoltre, incorpora un chip GNSS ad alta precisione conveniente che consente funzionalità di posizionamento preciso (nota: è necessaria una stazione base per la modalità Cinematica in tempo reale (RTK)).
Related Collections