






CUAV Pixhawk V6X V2 Controller per droni per PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV Pixhawk V6X V2 Controller per droni per PX4 ArduPilot, STM32H753IIK6, RM3100, Ethernet 100Mbps
CUAV
Impossibile caricare la disponibilità di ritiro
Panoramica
CUAV Pixhawk V6X V2 è un controller di droni della serie Pixhawk progettato per il firmware di autopilota PX4 e ArduPilot. Segue lo standard Pixhawk FMU v6x e la filosofia di design modulare, presentando sensori ridondanti di grado industriale aggiornati, un orologio esterno a temperatura costante e un design di dissipazione del calore MCU, commutazione del livello PWM a 5V/3.3V e una struttura di assorbimento degli urti brevettata. Il modulo di gestione dell'alimentazione standard PMU 2 Lite supporta 70V di ingresso e 220A di rilevamento della corrente.
Caratteristiche principali
- Unità a virgola mobile a doppia precisione H7 (STM32H753IIK6); unità a virgola mobile a doppia precisione a 480MHz; 2M memoria Flash
- IMU industriale a matrice tripla ridondante dissimile con design di bus e alimentazione indipendenti (IIM-42652, BMI088, ICM-45686)
- Barometro ridondante combinato a doppia uscita (BMP581, ICP-20100)
- Sistema di assorbimento degli urti centrale con assorbimento degli urti a tre assi (X, Y, Z); design di supporto inclinato a quattro angoli; nuovo tipo di materiale assorbente degli urti
- Compasso magnetico RM3100 di grado automobilistico per un robusto rifiuto delle interferenze magnetiche
- Compensazione del clock esterno a cristallo IMU (utilizzato con un clock esterno a temperatura costante ad alta precisione per ridurre gli errori ODR e migliorare la sensibilità e la sincronizzazione)
- Sistema di controllo della temperatura costante: silicone termoconduttivo e compensazione della temperatura IMU per ridurre la deriva legata alla temperatura
- Software flessibile che passa tra 5V e 3.3V livelli di uscita PWM
- Interfaccia Ethernet integrata da 100 Mbps per sincronizzazione dati ad alta velocità con dispositivi come computer di missione e telecamere di rilevamento
- Supporta il boot sicuro e i servizi di aggiornamento del firmware sicuro
- Design dell'alimentazione multi-redundante; supporta l'ingresso PMU CAN a 2 canali; include PMU 2 Lite come standard
- Fori di montaggio inferiori aggiunti per montaggio diretto a vite; fori di montaggio compatibili con viti standard M2
Specifiche
| Processore | STM32H753IIK6 |
| Coprocessore | STM32F103 |
| Versione | Pixhawk V6XV2 |
| CPU / memoria (dichiarata) | Unità a virgola mobile a doppia precisione da 480MHz; 2M di memoria Flash |
| Accelerometro & giroscopio | IIM-42652; BMI088; ICM-45686 |
| Compasso | RM3100 |
| Barometro | BMP581; ICP-20100 |
| PWM I/O | 16 |
| Livello PWM | 3.3V / 5V (commutazione software) |
| Potenza | 2 (2 interfacce di alimentazione CAN) |
| Porta GPS | 2 (GPS1: interfaccia GPS con I2C e interruttore di sicurezza; GPS2: interfaccia con I2C e GPS) |
| Porta TELEM | 3 |
| Bus CAN | 2 |
| PPM RC | 1 (ingresso dedicato per ricevitore PPM) |
| SBUS/DSM/RSSI | 2 (1 ingresso SBUS/DSM/Spektrum; 1 analogico 3.3V/PWM input) |
| Uscite SBUS | 1 |
| Debug FMU | 1 |
| Debug IO | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI esterno 1 | 1 (interfaccia SP16 per espansione sensore esterno) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| Porta USB | 2 (Tipo-C x1; interfaccia GH x1 per connessione USB esterna) |
| Scheda TF | 1 |
| Modulo di alimentazione | PMU standard 2 Lite (versione 5V), tensione di ingresso: 12-70V |
| Tensione di funzionamento | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Potenza: 4.85-5.45V |
| Temperatura di funzionamento | -20 a 85C |
| Dimensioni | 45 x 85.1 x 29.2 mm |
| Peso | Controller: 97.9g; Core: 43.1g; Scheda portante (inclusi viti): 54.8g |
| Nota di montaggio (testo del diagramma) | Fori di montaggio compatibili con viti standard M2; dimensioni indicate: 72 mm; 22.50 mm; 24 mm |
Cosa è incluso
- Pixhawk V6X V2 x1
- Modulo di alimentazione CAN PMU 2 Lite 5V x1
- Cavo di alimentazione intestazione PMU 2 Lite-5V (Versione X7+ (V6X)), lunghezza del cavo: 25cm x1
- Scheda di estensione CAN/I2C x1
- Scheda di memoria TF x1
- Cavo Type-C, lunghezza del cavo: 100cm x1
- Cavo DSM RC, lunghezza del cavo: 30cm x1
- Cavo SBUS RC, lunghezza del cavo: 30cm x1
- Cavo PPM RC/SBUS OUT, lunghezza del cavo: 30cm x1
- Cavo Ethernet, lunghezza del cavo: 40cm x1
- Cavo CAN, lunghezza del cavo: 30cm x1
- Cavo TELEM, lunghezza del cavo: 30cm x1
- Cavo UART 4, lunghezza del cavo: 30cm x1
- UART4 -> Cavo I2C, lunghezza del cavo: 30cm x1
- Cavo ADIO, lunghezza del cavo: 30cm x1
- Cavo di debug, lunghezza del cavo: 10cm x1
- Cavo di estensione con connettore femmina USB -> Type-C, lunghezza del cavo: 50cm x1
- 3M Biadesivo x2
Applicazioni
- Compatibile con ArduPilot e PX4
- Supporta multi-rotore, ala fissa, ala fissa VTOL, elicottero senza pilota, veicoli senza pilota e navi senza pilota (sottomarini)
- Sincronizzazione dei dati Ethernet ad alta velocità con computer di missione e altri dispositivi a bordo dove supportato
Per controlli di compatibilità e domande di configurazione, contattare [email protected] o visitare https://rcdrone.top/.
Video
Dettagli

Il controller di volo Pixhawk V6X V2 utilizza un processore H7 e presenta un'IMU a tripla ridondanza, un barometro duale e una bussola RM3100 con un design ad assorbimento degli urti.

Il Pixhawk V6X V2 utilizza un processore STM32H753IIK6 H7 per supportare configurazioni di controllo di volo basate su PX4 e ArduPilot.

Il Pixhawk V6X V2 utilizza un supporto ad assorbimento degli urti a tre assi (X, Y, Z) con quattro supporti angolari inclinati per aiutare a ridurre vibrazioni e rumore.
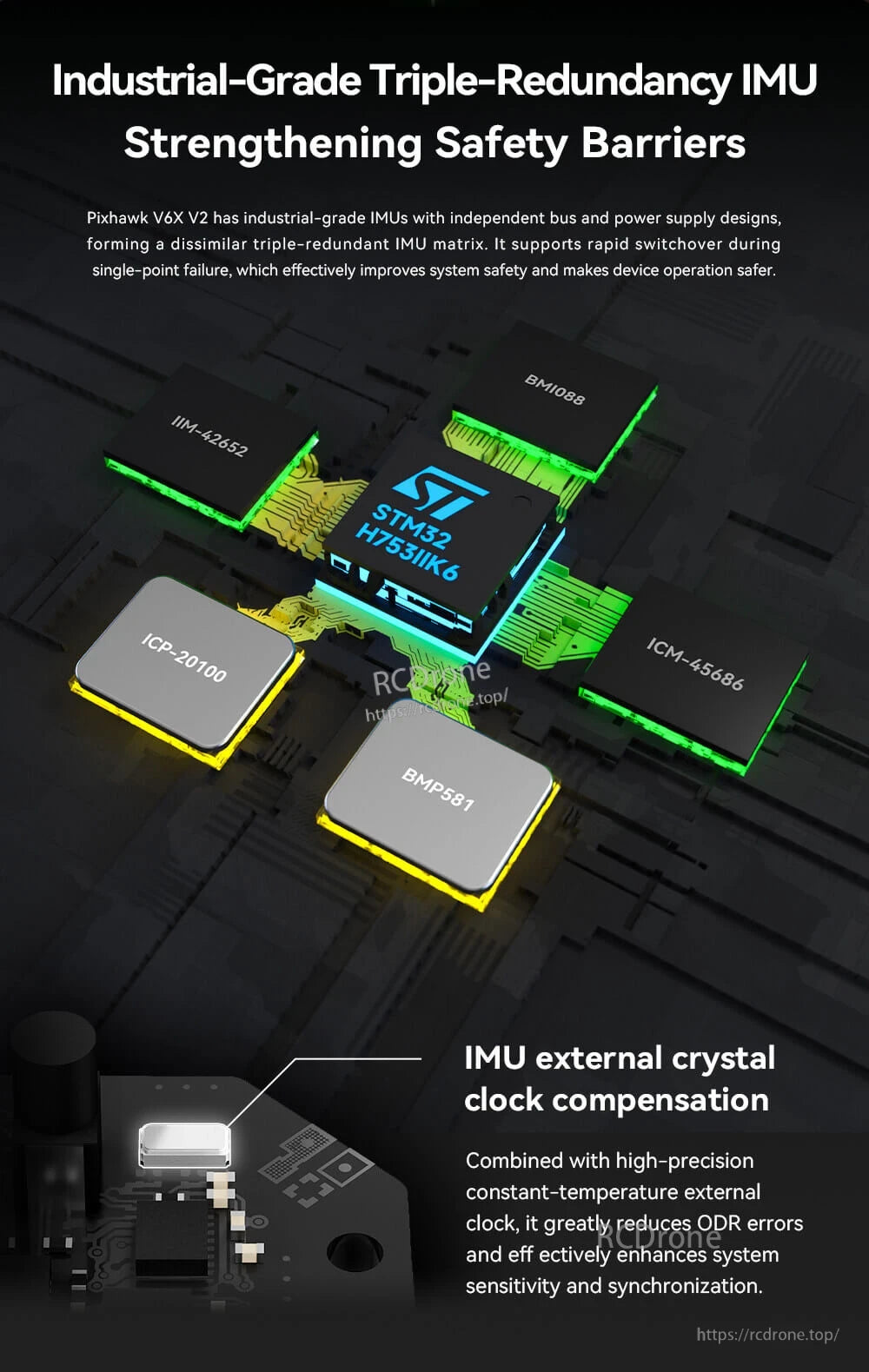
Il design del controller di volo Pixhawk V6X V2 presenta una configurazione IMU a tripla ridondanza attorno all'STM32H753IIK6, oltre a una compensazione del clock a cristallo esterno per il timing dei sensori.

Il Pixhawk V6X V2 integra un magnetometro RM3100 di grado automobilistico e supporta la determinazione dell'orientamento GPS per una navigazione e un'orientazione più stabili.
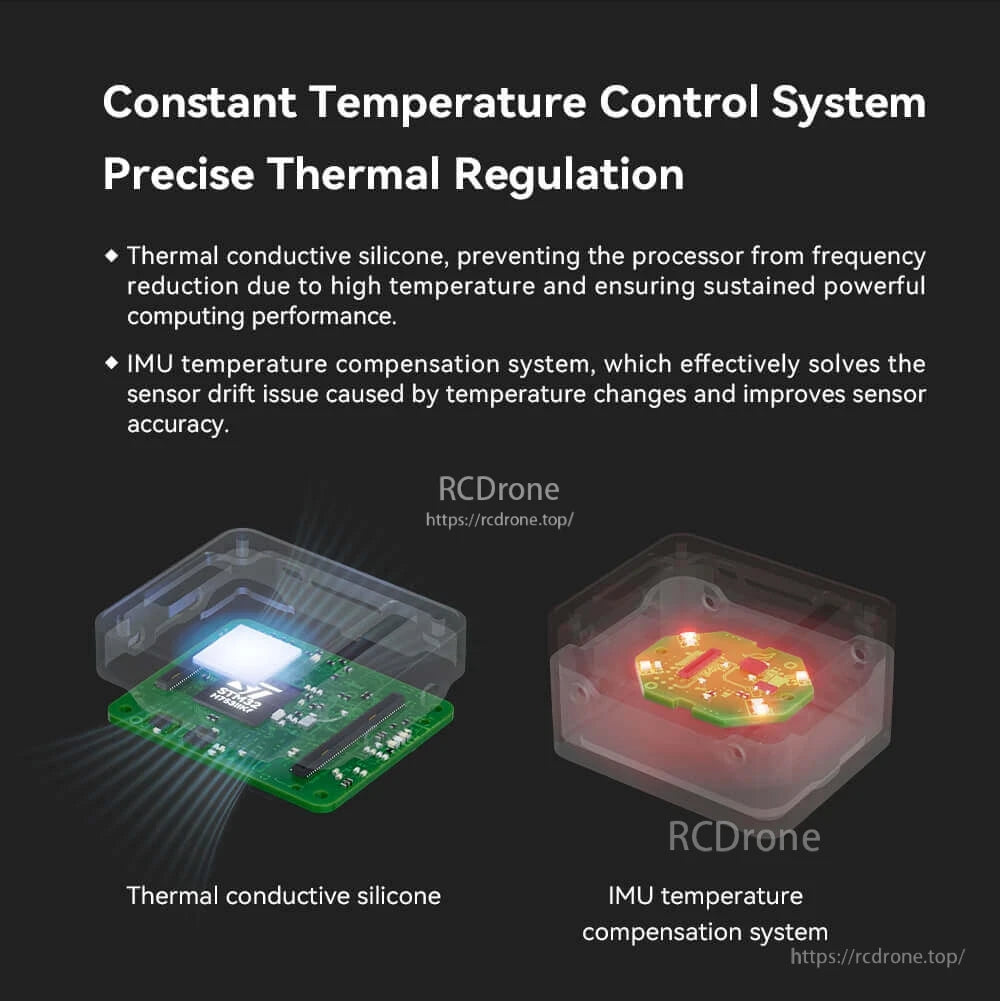
Un sistema di controllo della temperatura costante utilizza silicone termoconduttivo e compensazione della temperatura IMU per ridurre la deriva legata alla temperatura.
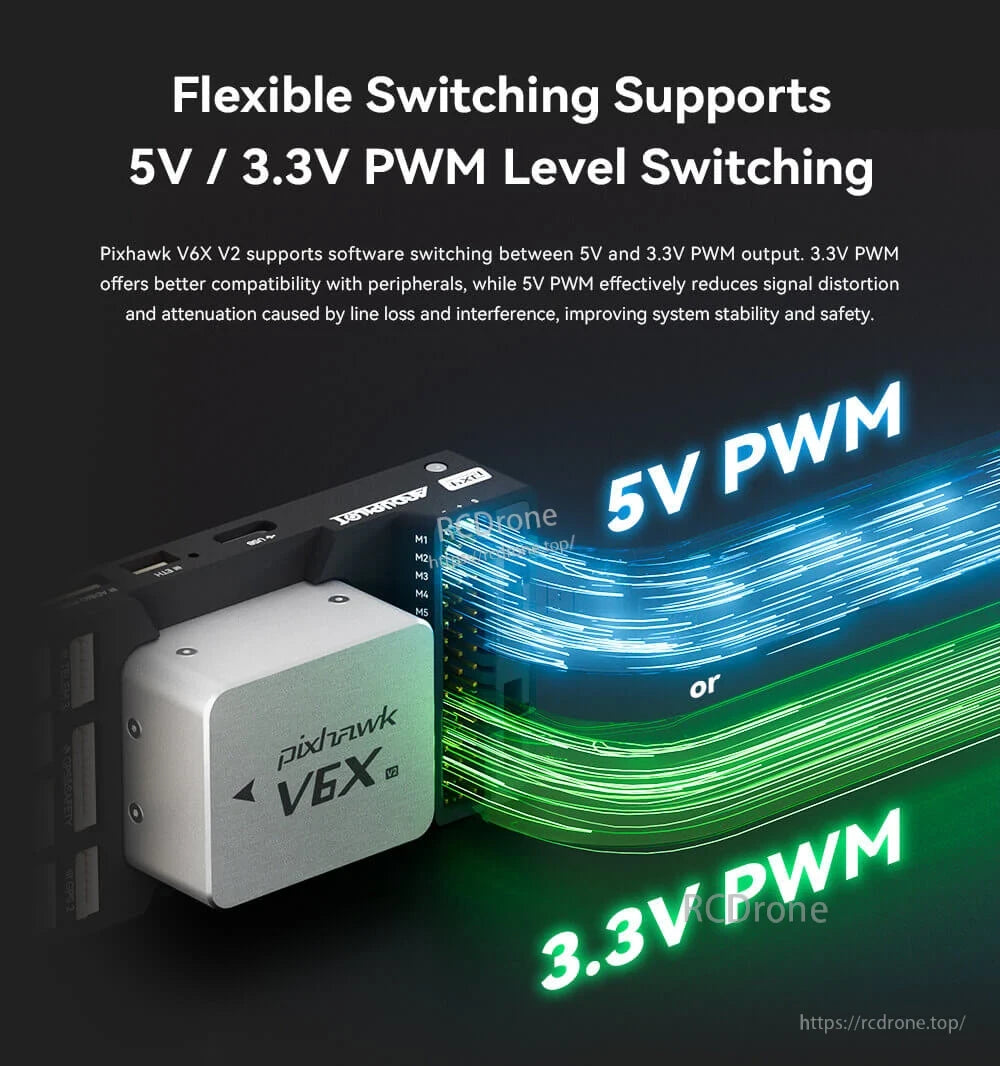
Pixhawk V6X V2 supporta il passaggio flessibile tra livelli di uscita PWM di 5V e 3.3V per una maggiore compatibilità con diversi periferici.

Pixhawk V6X V2 integra un'interfaccia Ethernet da 100 Mbps insieme a porte etichettate come USB, TELEM3, CAN e GPS & Sicurezza per un cablaggio pulito.
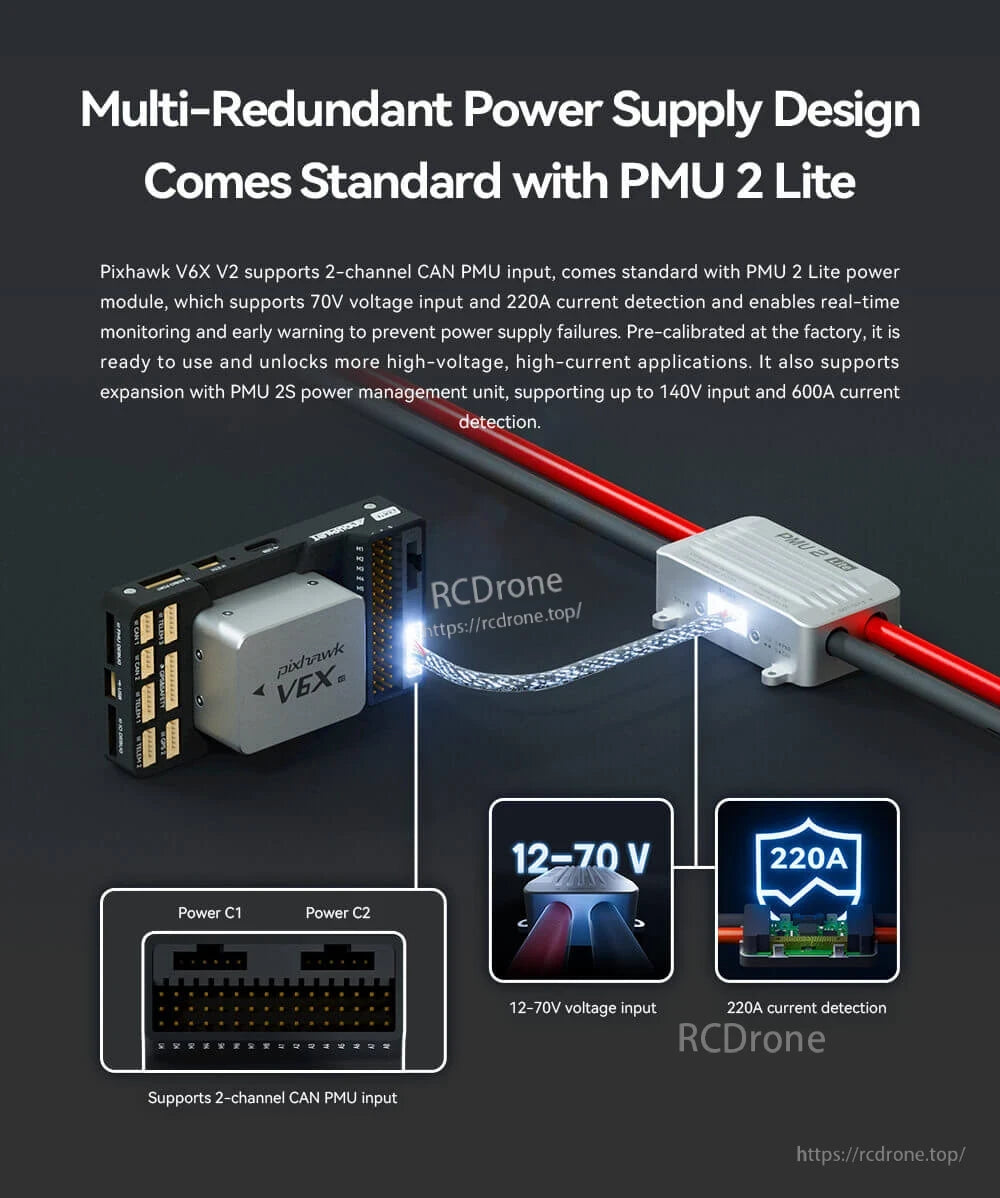
Pixhawk V6X V2 si abbina al modulo PMU 2 Lite per un'alimentazione multi-redundante, supportando 12–70V e rilevamento della corrente a 220A.

Il CUAV Pixhawk V6X V2 utilizza un modulo centrale modulare e staccabile su una scheda portante per semplificare la personalizzazione e l'accesso ai connettori.
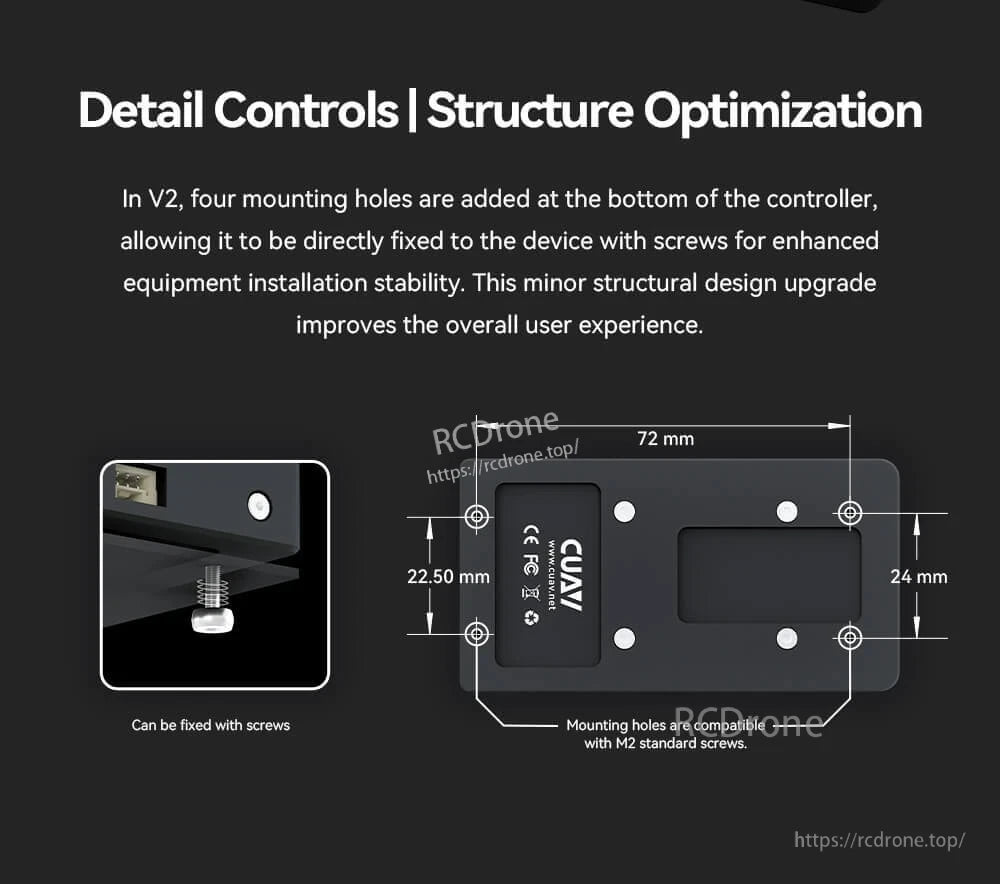
Il CUAV Pixhawk V6X V2 aggiunge quattro fori di montaggio inferiori compatibili con M2 con un ingombro di 72 mm per un'installazione a vite più sicura.

Il Pixhawk V6X V2 supporta il firmware ArduPilot e PX4 per una gamma di piattaforme senza pilota, tra cui multirotori, aerei ad ala fissa e veicoli terrestri o marini.
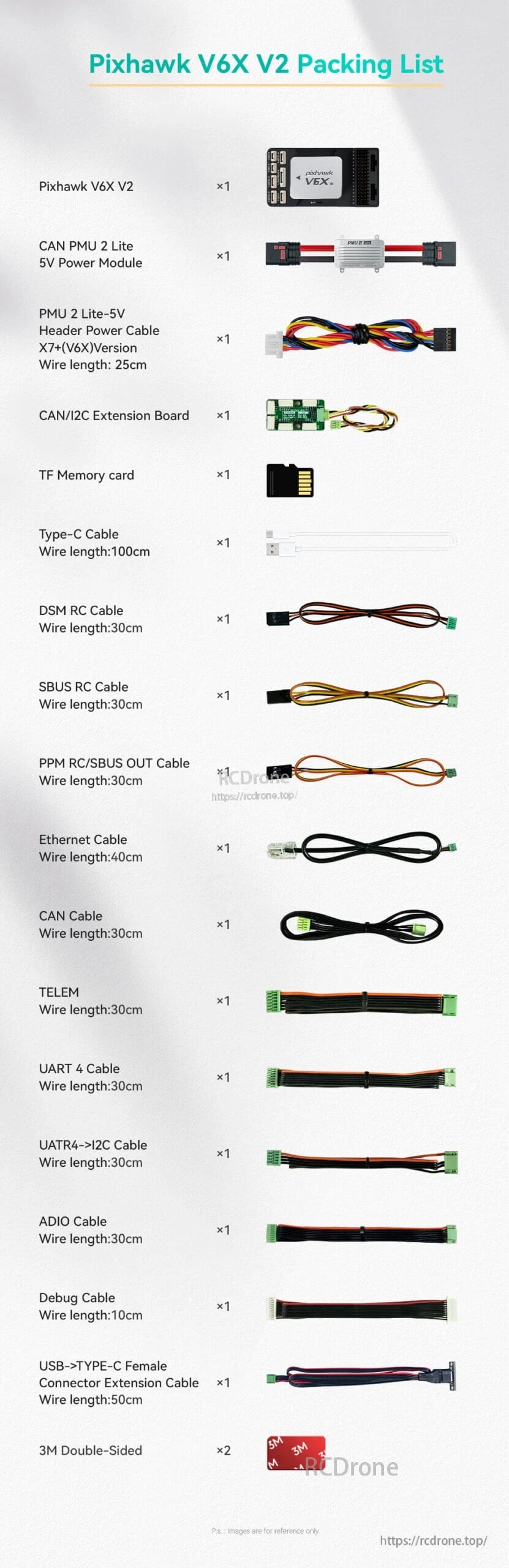
Il kit Pixhawk V6X V2 include il controller di volo, il modulo di alimentazione CAN PMU 2 Lite 5V, la scheda di memoria TF e un set di cavi Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO e di debug.
Related Collections


















