








CUAV X25 EVO Autopilota Controller di Volo - STM32H7, Triplo IMU, Doppio Barometro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV X25 EVO Autopilota Controller di Volo - STM32H7, Triplo IMU, Doppio Barometro, RM3100, CAN, 16 PWM, PX4/ArduPilot
CUAV
Impossibile caricare la disponibilità di ritiro
Panoramica
CUAV X25 EVO è un controller centrale ad alta affidabilità per sistemi senza pilota. Combina un processore STM32H7 (480 MHz, 2 MB Flash) con un array IMU industriale triplo, barometri doppi e magnetometri RM3100. Un'architettura di alimentazione riprogettata supporta un input di 10–18 V e fornisce fino a 5 V/12 A di output esterno per alimentare carichi pesanti. Il controller integra ridondanza di alimentazione a doppio percorso, protezione completa da ESD/sovracorrente, indicazione di stato RGB e un design modulare CORE/carrier. È compatibile con ArduPilot e PX4, ed è adatto per multirotori, alianti, VTOL, elicotteri, UGV/USV/UUV e altre piattaforme.
Caratteristiche principali
-
Calcolo ad alte prestazioni: STM32H7 @ 480 MHz, 2 MB Flash; basso utilizzo della CPU per algoritmi avanzati (navigazione non GPS, filtri FFT, script LUA).
-
Suite di sensori industriali:
-
IMU: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
-
Magnetometri: PNI RM3100 (anti-interferenza).
-
Barometri: TDK ICP20100 & Bosch BMP581 (duale).
-
Matrice IMU eterogenea con commutazione tollerante ai guasti.
-
-
Sistema di compensazione della temperatura duale per l'IMU: compensazione in tempo reale ±0.5 °C; rispetto alla generazione precedente—15% minore deriva di temperatura, 25% migliore coerenza della soluzione di assetto.
-
Isolamento delle vibrazioni: smorzamento in matrice di nylon simmetrica inclinata di 4ª generazione; isolatori fissi esterni opzionali per sopprimere vibrazioni anomale ad alta frequenza e migliorare la fedeltà dei dati.
-
Architettura di alimentazione: DC-DC ad alta potenza 5 V/15 A a bordo; la porta esterna supporta un'uscita di 5 V/12 A; intervallo di ingresso 10–18 V.
-
Networking &e bus: CAN bus (batteria intelligente/ESC/servomotori, feedback di telemetria) + 100 M Ethernet.
-
Abbondante I/O: fino a 16 PWM tramite porte servo; fino a 32 PWM tramite espansione CAN.
-
Ruggedizzazione &e QA: ridondanza di alimentazione a doppio canale, protezione ESD &e sovracorrente, design del connettore antistatico, rivestimento conformale PCB e test completamente automatizzati.
-
Indicatore di stato RGB: LED multicolore per armare, alimentazione, GNSS/posizione, modalità di errore, ecc.
Specifiche
| Categoria | Dettaglio |
|---|---|
| Processore | STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash |
| Versione | X25 EVO |
| IMU | IIM-42653 ×2 (giroscopio ±4000 °/s; accelerometro ±32 g); IIM-42652 ×1 (giroscopio ±2000 °/s; accelerometro ±16 g) |
| Magnetometro | RM3100 |
| Barometri | TDK ICP20100 / Bosch BMP581 (duale) |
| Uscite PWM | 16 (banco servo M1–M16) |
| Ingressi di alimentazione (CAN) | 2 |
| porte GPS | 2 |
| porte TELEM | 2 |
| UART4 | 1 |
| ingresso RC | 1 (PPM / SBUS / DSM ecc.) |
| DEBUG (DSU) | 1 |
| Ethernet | 1 (100 M) |
| CAN | CAN1 ×3, CAN2 ×2 (totale 5) |
| Espansione SPI6 | 1 |
| ADC | 1× 3V3, 1× 6V6 |
| USB | 1× Tipo-C |
| I²C | 3 |
| RSSI | 1 |
| Modulo di alimentazione | PMU 2 Lite |
Condizioni di funzionamento &e fisiche
| Articolo | Valore |
|---|---|
| Tensione di ingresso (controller) | 10–18 V |
| USB | 4.75–5.25 V |
| Gamma di alimentazione PMU 2 Lite | 20–70 V |
| Rete esterna da 5 V | fino a 12 A di uscita (per periferiche/carichi pesanti) |
| Temperatura di funzionamento | −20 °C a +85 °C |
| Dimensioni | 76.5 × 45.45 × 32.2 mm |
| Peso | 110 g |
Interfacce &e punti salienti del layout
-
Rete Doppia POWER C1/C2, RC IN, Banca servo M1–M16.
-
Connettori laterali per UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
-
CORE progettato che può essere staccato per lo sviluppo di schede portanti personalizzate.
Compatibilità &e Applicazioni
-
Firmware: completamente compatibile con ArduPilot e PX4 (driver &e funzionalità).
-
Veicoli: multirotore, ala fissa, VTOL, elicotteri, UGV, USV, UUV/sottomarino, e altre piattaforme senza pilota.
Contenuto della confezione (X25 EVO Kit)
-
X25 EVO controllore di volo × 1
-
Modulo di alimentazione CAN PMU2 Lite (15 V) × 1
-
Scheda di espansione CAN × 1
-
Cavi dati CAN (35 cm) × 2
-
Cavo USB Type-C (100 cm) × 1
-
Cavi TELEM (30 cm) × 2
-
Cavo RSSI (22 cm) × 1
-
Cavo RC IN (30 cm) × 1
-
Cavo di alimentazione del controllore smart CAN PMU2 Lite 15 V (30 cm) × 1
Dettagli

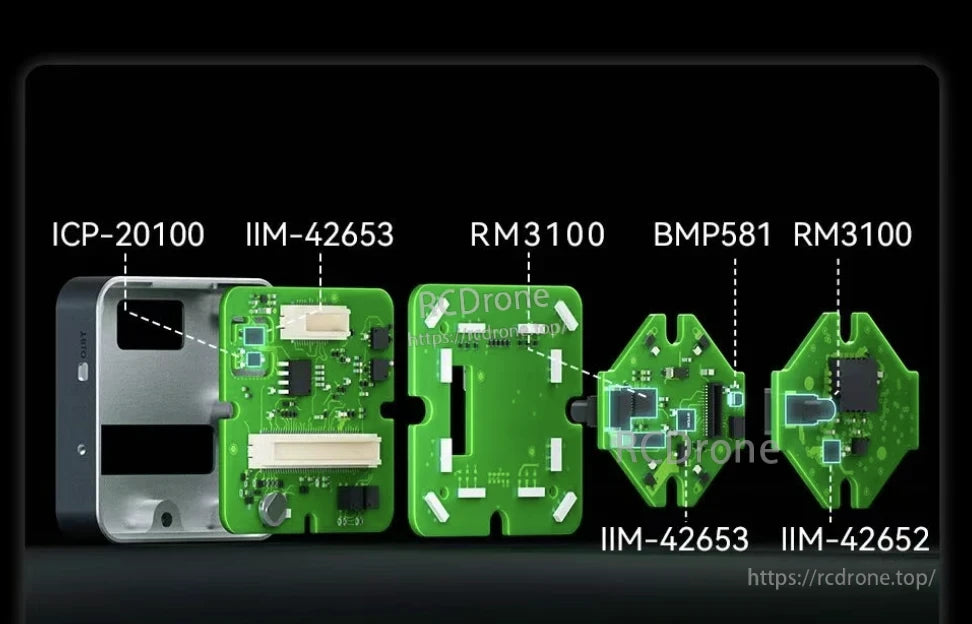
Componenti del controller di volo CUAV X25 EVO etichettati con modelli di chip.


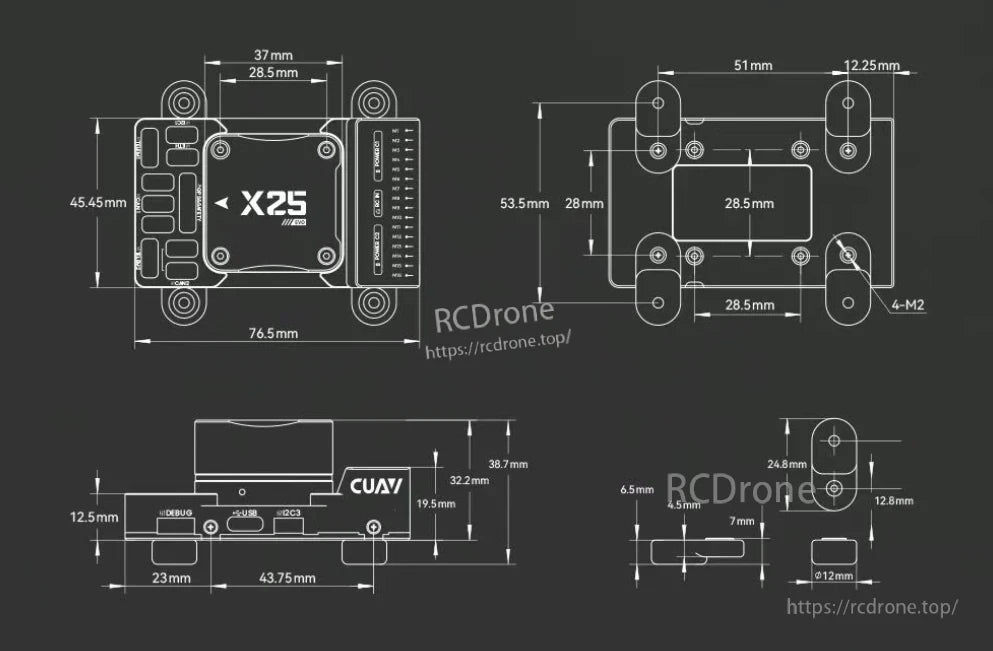
Il controller di volo CUAV X25 EVO misura 76,5 mm x 45,45 mm, presenta porte di debug, USB e I2C3, e include quattro viti M2 per un montaggio sicuro.

X25 EVO Autopilota include il controller di volo, il modulo di alimentazione, la scheda di espansione CAN, i cavi di dati e telemetria, il cavo Type-C, i fili RSSI e RC IN, e la linea di alimentazione.
Related Collections








