






CubeMars AK10-9 V2.0 Attuatore Robotico KV60/KV100 | Coppia nominale 18Nm/15Nm, Doppio Encoder, Modalità MIT & Servo
CubeMars AK10-9 V2.0 Attuatore Robotico KV60/KV100 | Coppia nominale 18Nm/15Nm, Doppio Encoder, Modalità MIT & Servo
CubeMars
Impossibile caricare la disponibilità di ritiro
Panoramica
Il CubeMars AK10-9 V2.0 è un attuatore robotico altamente integrato che combina un motore BLDC ad alte prestazioni, un riduttore planetario, encoder doppi e un driver integrato in un'unità compatta. Supportando sia la modalità di alimentazione MIT che la modalità di controllo servo industriale, offre un output di coppia fluido, posizionamento accurato e risposta rapida, rendendolo ideale per robot a zampe, esoscheletri e AGV. Disponibile nelle varianti KV60 e KV100, offre fino a 48Nm di coppia di picco, con dissipazione del calore ottimizzata e monitoraggio della temperatura in tempo reale per una lunga affidabilità.
Caratteristiche principali
-
Modalità di controllo duale: Supporta il passaggio senza soluzione di continuità tra la modalità di alimentazione MIT e la modalità di controllo servo per un controllo del movimento flessibile.
-
Alta coppia di uscita: Fino a 48Nm di coppia di picco con funzionamento stabile e basso gioco (0,33°).
-
Altamente integrato: Combina motore, encoder, driver e riduttore planetario in un'unica forma compatta.
-
Uscita & Encoder interni: Encoder magnetici integrati interni a 14 bit e esterni a 15 bit garantiscono un feedback accurato.
-
Cuscinetti a rulli incrociati: Migliora la resistenza ai carichi assiali e radiali, aumentando l'affidabilità nelle applicazioni dinamiche.
-
Sensore di temperatura interno: Il monitoraggio della temperatura in tempo reale previene danni al motore sotto stress termico.
-
Dissipazione del calore ottimizzata: Il design della struttura unica migliora la gestione termica, garantendo un funzionamento stabile a lungo termine.
-
Funzionamento Silenzioso: Livello di rumore fino a 65 dB a 65 cm (versione KV60).
Specifiche
Specifiche AK10-9 V2.0 K60
| Applicazione | Robot con gambe, esoscheletro, AGV | Momento torcentale massimo (Nm) | 48 |
| Modalità di guida | FOC | Corrente di picco (ADC) | 29.8 |
| Temperatura ambiente di funzionamento | -20℃~50℃ | Kv (rpm/V) | 60 |
| Tipo di avvolgimento | stella | Kt (Nm/A) | 0.198 |
| Classe di isolamento | C | Ke (V/krpm) | 17.2 |
| Isolamento alta tensione | 1000V 5mA/2s | Resistenza fase a fase (mΩ) | 195 |
| Resistenza di isolamento | 1000V 10MΩ | Induttanza fase a fase (μH) | 181 |
| Fase | 3 | Inerzia (gcm²) | 1002 |
| Coppie di poli | 21 | Km (Nm/√W) | 0.45 |
| Rapporto di riduzione | 9:1 | Costante di tempo meccanica (ms) | 0.5 |
| Retroazione (Nm) | 0.8 | Costante di tempo elettrica (ms) | 0.93 |
| Gioco (°) | 0.33 | Peso (g) | 960 |
| Sensore di temperatura | NTC MF51B 103F3950 | Rapporto massimo di coppia e peso (Nm/kg) | 50 |
| Rumore dB a 65 cm dal motore | 65 | Connettore CAN | A1257WR-S-4P |
| Valutazioni di carico di base (dyn. C ) N | 2000 | Connettore UART | A1257WR-S-3P |
| Carichi nominali di base (stat.C0) N | 2520 | Connettore di alimentazione | XT30PW-M |
| Tensione nominale (V) | 24/48 | Tipo di encoder ad anello interno | Encoder magnetico |
| Momento torcentale nominale (Nm) | 18 | Risoluzione dell'encoder ad anello interno | 14bit |
| Velocità nominale (rpm) | 109/228 | Tipo di encoder ad anello esterno | Encoder magnetico |
| Corrente nominale (ADC) | 10.6 | Risoluzione dell'encoder ad anello esterno | 15bit |
AK10-9 V2.0 KV100 Specifiche
| Applicazione | Robot con gambe, esoscheletro, AGV | Momento torcentale massimo (Nm) | 38 |
| Modalità di guida | FOC | Corrente di picco (ADC) | 41.2 |
| Temperatura ambiente di funzionamento | -20℃~50℃ | Kv (rpm/V) | 100 |
| Tipo di avvolgimento | Delta | Kt (Nm/A) | 0.114 |
| Classe di isolamento | C | Ke (V/krpm) | 9.9 |
| Isolamento alta tensione | 1000V 5mA/2s | Resistenza fase a fase (mΩ) | 65.5 |
| Resistenza di isolamento | 1000V10MΩ | Induttanza fase a fase (μH) | 60 |
| Fase | 3 | Inerzia (gcm²) | 1002 |
| Coppie di poli | 21 | Km (Nm/√W) | 0.45 |
| Rapporto di riduzione | 9:1 | Costante di tempo meccanica (ms) | 0.51 |
| Retroazione (Nm) | 0.8 | Costante di tempo elettrica (ms) | 0.92 |
| Gioco (°) | 0.33 | Peso (g) | 960 |
| Sensore di temperatura | NTC MF51B 103F3950 | Rapporto massimo di coppia e peso (Nm/kg) | 39.6 |
| Rumore dB a 65CM dal motore | 70 | Connettore CAN | A1257WR-S-4P |
| Carichi di base (dyn. C) N | 2000 | Connettore UART | A1257WR-S-3P |
| Carichi di base (stat.C0) N | 2520 | Connettore di alimentazione | XT30PW-M |
| Tensione nominale (V) | 24/48 | Tipo di encoder a loop interno | Encoder magnetico |
| Momento torcentale nominale (Nm) | 15 | Risoluzione dell'encoder ad anello interno | 14bit |
| Velocità nominale (rpm) | 205/421 | Tipo di encoder ad anello esterno | Encoder magnetico |
| Corrente nominale (ADC) | 16.2 | Risoluzione dell'encoder ad anello esterno | 15bit |
| Numero di encoder | 2 |
Applicazioni
-
Robot Bionici con Gambe
-
Eseoscheletri per Riabilitazione o Supporto al Carico
-
Veicoli Terrestri Autonomi (AGV)
-
Sistemi di Controllo della Coppia delle Giunture
-
Robotica Umanoidale e Quadrupede
Download
![]() Manuale del Driver e Controllo della Serie AK v1.0.15.X.pdf
Manuale del Driver e Controllo della Serie AK v1.0.15.X.pdf
Dettagli
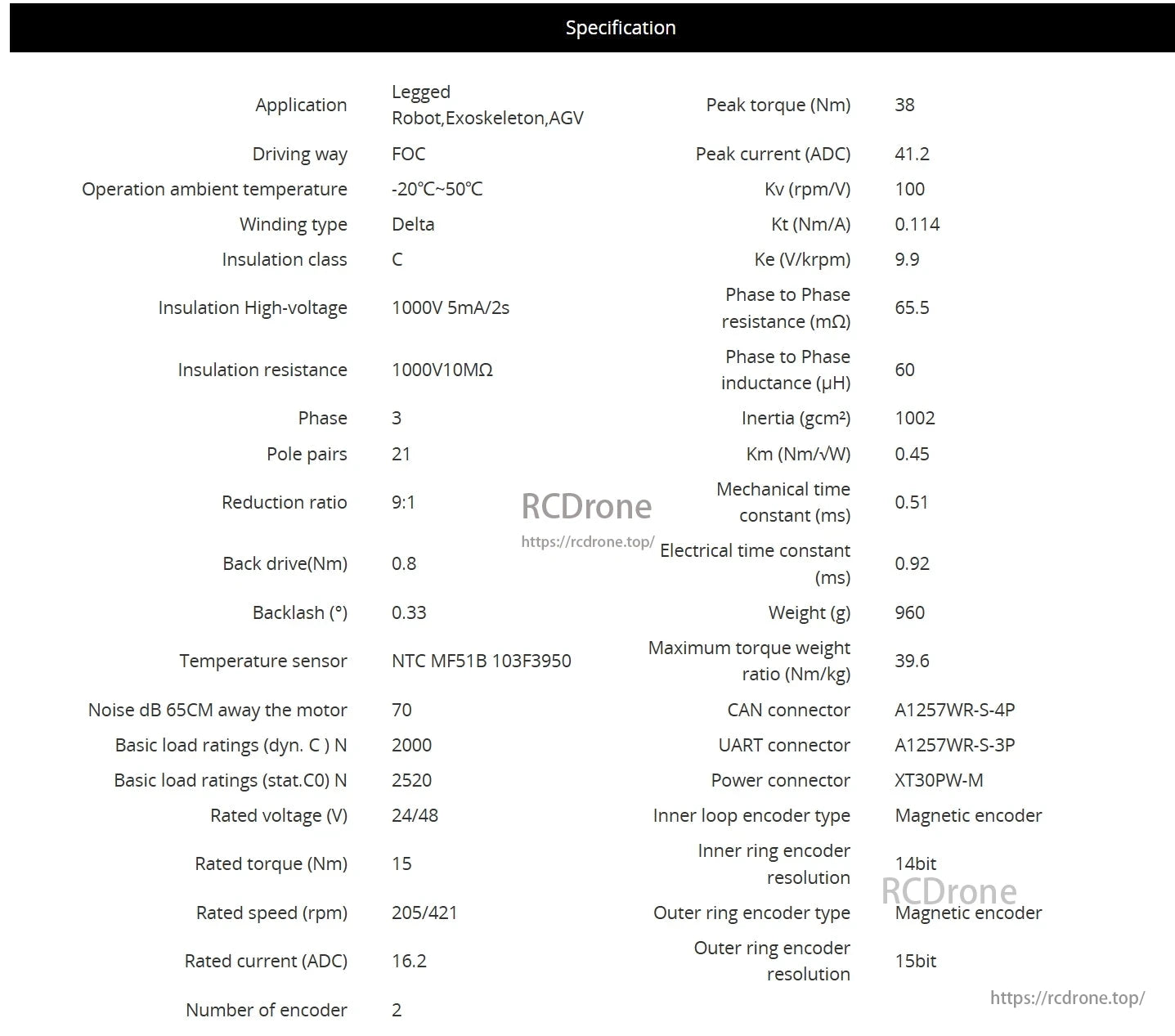
Attuatore Robotico CubeMars AK10: coppia di picco di 38 Nm, 41.2 corrente di picco ADC, funzionamento da -20°C a 50°C, rapporto di riduzione 9:1, peso 960g, rapporto coppia-peso massimo di 39.6 Nm/kg, rumore 70 dB, encoder magnetici, connettori CAN e UART.

Attuatore Robotico CubeMars AK10: coppia di picco 48 Nm, corrente di picco 29.8 A, funzionamento da -20°C a 50°C, isolamento 1000V, 3 fasi, 21 coppie di poli, rapporto di riduzione 9:1, peso 960g, rapporto coppia-peso massimo di 50 Nm/kg, encoder magnetici.

Grafico di Analisi per CubeMars AK10-9 V2.0 KV60@48VDC actuattuatore. Mostra la potenza in uscita (W), l'efficienza, la corrente (A) e la velocità (RPM) rispetto alla coppia (N.m). L'efficienza raggiunge il picco intorno a 12 N.m, mentre la potenza in uscita aumenta costantemente con la coppia. La corrente aumenta linearmente e la velocità diminuisce all'aumentare della coppia. Il grafico evidenzia le caratteristiche di prestazione dell'attuatore, dimostrando la sua capacità sotto carichi variabili.I principali indicatori includono una potenza massima in uscita che supera gli 800 W e una velocità operativa fino a 350 RPM a bassi torques. Questi dati aiutano a comprendere l'efficienza dell'attuatore e le dinamiche di potenza in diverse applicazioni.
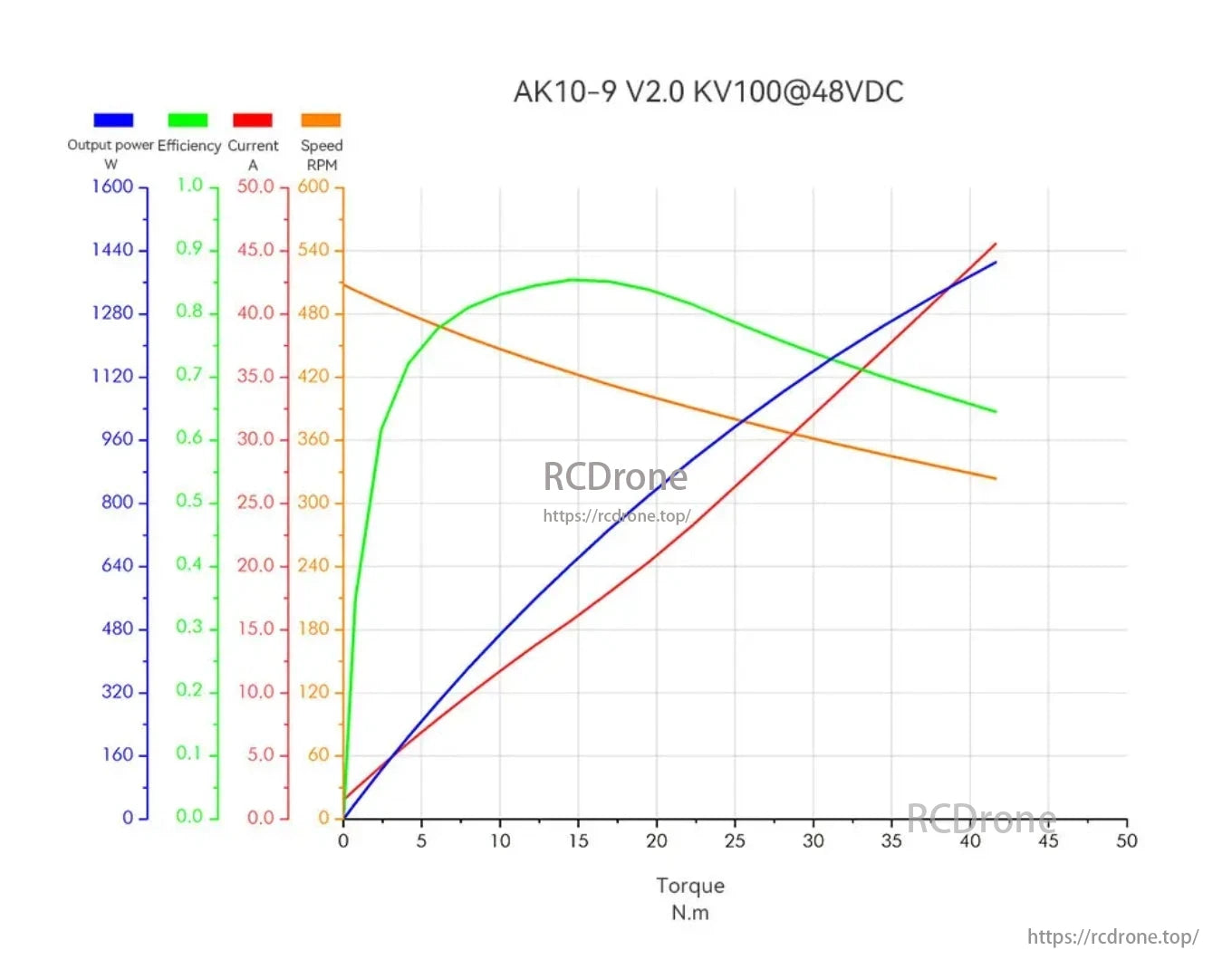
Le prestazioni dell'attuatore CubeMars AK10-9 V2.0 KV100@48VDC actusono rappresentate. La potenza in uscita (W), l'efficienza, la corrente (A) e la velocità (RPM) sono tracciate in funzione del torque (N.m). L'efficienza raggiunge il picco intorno a 15 N.m, mentre la potenza in uscita aumenta linearmente con il torque. Anche la corrente aumenta costantemente con il torque. La velocità diminuisce all'aumentare del torque, partendo da circa 480 RPM a zero torque. Il grafico illustra i punti di funzionamento ottimali per varie applicazioni, evidenziando le capacità dell'attuatore in diverse condizioni di carico. Questi dati aiutano nella selezione delle impostazioni appropriate per compiti specifici.

Servo di potenza integrato CubeMars AK10-9 KV60, modalità incluse. Attuatore robotico con FCC, CE, RoHS V2.0 certificazione.

Il Attuatore Robotico offre un controllo del motore efficiente, modalità di potenza precisa e una risposta più rapida per applicazioni industriali.

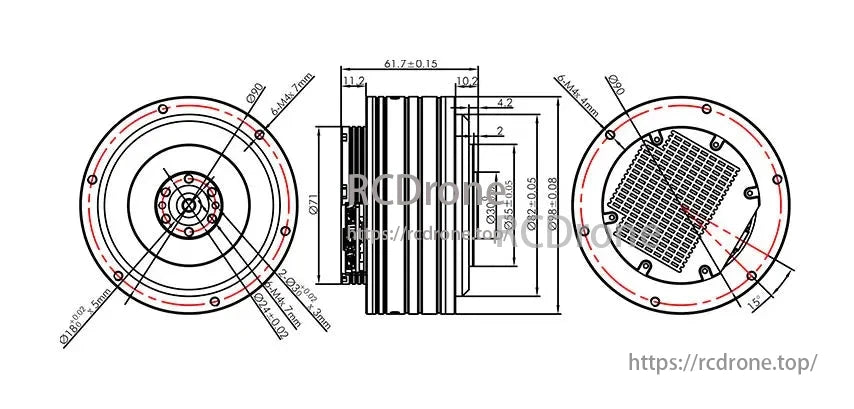
Il Attuatore Robotico CubeMars AK10 include un motore BLDC ad alte prestazioni, cuscinetti a rulli incrociati di grado industriale, sensore di temperatura, encoder di uscita, doppia modalità di controllo e riduttore planetario per una coppia stabile.

Ottimizza rapidamente la struttura e la dissipazione del calore. Migliora la dissipazione del calore del guscio del motore per una maggiore longevità e stabilità delle prestazioni del modulo di azionamento. SN: 1010921081.
Related Collections






