





CubeMars R80 KV110 Motore 48V 3-Fasi FOC con Sensori Hall, Azionamento per Esoscheletro & Robotica
CubeMars R80 KV110 Motore 48V 3-Fasi FOC con Sensori Hall, Azionamento per Esoscheletro & Robotica
CubeMars
Impossibile caricare la disponibilità di ritiro
Panoramica
Il motore CubeMars R80 KV110 è un motore trifase destinato ad applicazioni di azionamento per esoscheletri e robotica, con sensori Hall integrati e supporto per FOC (controllo orientato al campo). Presenta un design speciale per la dissipazione del calore e un'interfaccia di tipo connettore per semplificare l'installazione.
Caratteristiche principali
- Sensori Hall integrati
- Deviazione di precisione dell'angolo elettrico: ±10°
- Design speciale per la dissipazione del calore (base ultra-sottile & pad in silicone ad alta conducibilità termica; lunghezza complessiva ridotta per migliorare la dissipazione del calore)
- Design del foro a motivo sulla campana per l'installazione del riduttore (riduttore armonico, flangia o altri tipi di riduttori)
- Design del connettore per un'installazione più semplice (sostituisce i cavi tradizionali)
- Grafico analitico del funzionamento del motore fornito (velocità vs coppia a 48V; zone di non funzionamento / funzionamento a breve termine / funzionamento continuo)
Specifiche
| Applicazione | Eseoscheletro |
| Modalità di guida | FOC |
| Temperatura ambiente di funzionamento | -20℃~50℃ |
| Tipo di avvolgimento | delta |
| Classe di isolamento | H |
| Isolamento ad alta tensione | 1000V 5mA/2s |
| Resistenza di isolamento | 1000V10MΩ |
| Fase | 3 |
| Coppie di poli | 21 |
| Tensione nominale (V) | 48 |
| Velocità a vuoto (rpm) | 4320 |
| Momento torcentale nominale (Nm) | 1.3 |
| Velocità nominale (rpm) | 3580 |
| Corrente nominale (ADC) | 12.3 |
| Momento torcentale di picco (Nm) | 4 |
| Corrente di picco (ADC) | 38.6 |
| Kv (rpm/V) | 90 |
| Kt (Nm/A) | 0.107 |
| Ke (V/krpm) | 10.58 |
| Resistenza fase a fase (mΩ) | 125 |
| Induttanza fase a fase (μH) | 87 |
| Inerzia (gcm²) | 759.98 |
| Km (Nm/√W) | 0.3026 |
| Costante di tempo meccanica (ms) | 0.83 |
| Costante di tempo elettrica (ms) | 0.70 |
| Peso (g) | 354 |
| Rapporto massimo di coppia peso (Nm/kg) | 11.3 |
| Fase del motore U V W | Disegno ingegneristico di riferimento |
| Porta sensore Hall | VCC, GND, Hu, Hv, HW (disegno ingegneristico di riferimento) |
| Corrispondenza | Hu-U; Hv-V; Hw-W |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Manuali / Documenti
Per domande sulla selezione di cablaggio/driver o aiuto con la documentazione, contattare il supporto tramite https://rcdrone.top/ o email [email protected].
Nota dal grafico fornito: Tutti i dati sono solo a scopo informativo | Soggetti a modifiche senza preavviso.
Dettagli

CubeMars R80 KV110 è progettato per giunti robotici compatti e azionamenti per esoscheletri, con un profilo basso attuatore-stile.

I sensori Hall integrati forniscono feedback sulla posizione del rotore per un controllo FOC stabile, con una deviazione di precisione dell'angolo elettrico valutata a ±10°.

Un design speciale per la dissipazione del calore utilizza una base ultra-sottile e un pad in silicone ad alta conducibilità termica per aiutare a gestire la temperatura in costruzioni compatte.

I fori di montaggio a modello sulla campana semplificano l'attacco di un riduttore armonico, flangia o altri tipi di riduttori.
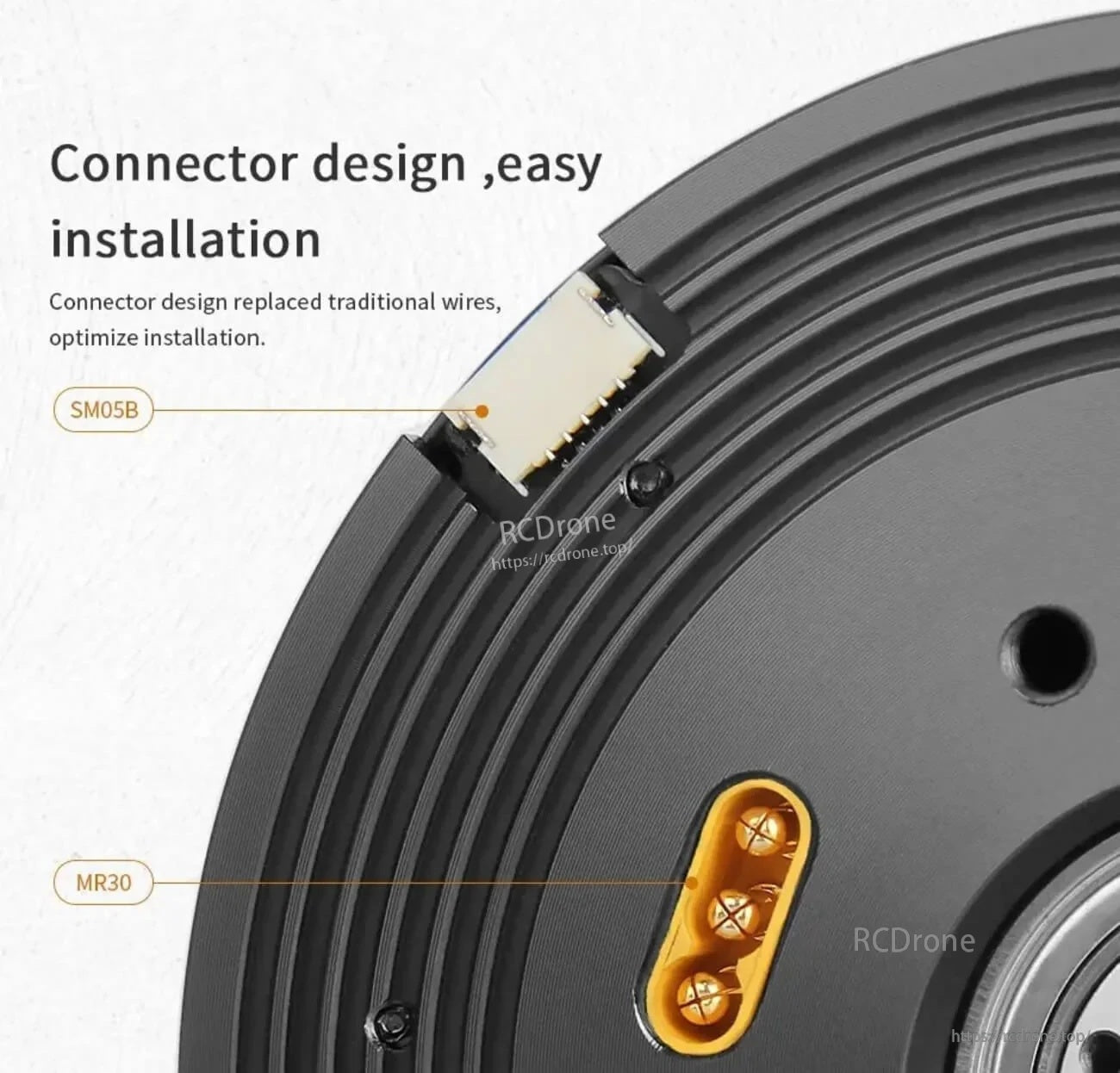
Il cablaggio in stile connettore sostituisce i tradizionali cavi sciolti per un'installazione più pulita e veloce delle connessioni di alimentazione e sensore.
Il design elettromagnetico ottimizzato mira a un basso torque di cogging e a una bassa inerzia del rotore per un controllo del movimento più fluido.

Progettato per robot a gambe a carico pesante e altre applicazioni di giunti ad alta coppia dove è importante un'uscita stabile.

Il grafico operativo coppia‑vs‑velocità a 48V aiuta a scegliere un intervallo continuo sicuro e a comprendere la capacità di picco a breve termine.
Related Collections





