






CubeMars RI100 KV105 Motore Torque Inrunner Senza Telaio per Braccio Cobot, Esoscheletro, Braccio Robotico
CubeMars RI100 KV105 Motore Torque Inrunner Senza Telaio per Braccio Cobot, Esoscheletro, Braccio Robotico
CubeMars
Impossibile caricare la disponibilità di ritiro
Panoramica
Il motore a coppia senza telaio CubeMars RI100 KV105 è un motore BLDC ad alte prestazioni progettato per applicazioni di precisione come bracci cobot, esoscheletri, robot a zampe e bracci robotici. Operando a 12V–48V, offre fino a 4,95 Nm di coppia massima, mantenendo dimensioni compatte e una bassa coppia di cogging per un controllo del movimento fluido e preciso. Con una struttura senza telaio e inrunner, offre un'eccezionale densità di coppia, stabilità termica e flessibilità per integrazioni personalizzate in strutture robotiche compatte o leggere.
Caratteristiche principali
-
Ampio intervallo di tensione: Compatibile con alimentatori da 24V, 36V e 48V.
-
Controllo ad alta precisione: Supporta risoluzioni dell'encoder fino a 0.01°, compatibile con Renishaw e Sick encoder.
-
Momento di Cogging Basso: Consente una rotazione più fluida e un basso rumore—ideale per giunti robotici dinamici.
-
Rotore a Magneti Permanenti Curvi: Ottimizzato per il controllo della guida sinusoidale BEMF, garantendo una migliore reattività ed efficienza.
-
Statore Avvolto a Mano: 0,5 mm di distanza e alto fattore di riempimento per alta coppia e bassa inerzia (215,5 g·cm²).
-
Alta Tolleranza Termica: Supporta ambienti di lavoro da -40°C a 85°C (struttura del motore ambientale testata da -20°C a 50°C).
-
Leggero e Compatto: Solo 500g con un rapporto coppia-peso massimo di 9,9 Nm/kg.
Specifiche
Parametri Generali
| Parametro | Valore |
|---|---|
| Applicazione | Braccio Cobot / Eseoscheletro |
| Tipo di Motore | BLDC Inrunner senza telaio |
| Fase | 3 |
| Tipo di Avvolgimento | Delta |
| Coppie di Poli | 14 |
| Peso | 500g |
| Rapporto Coppia-Peso | 9.9 Nm/kg |
Caratteristiche Elettriche
| Parametro | Valore |
|---|---|
| Voltaggio Nominale (V) | 24 / 36 / 48 |
| Momento Nominale (Nm) | 1.76 |
| Momento di Picco (Nm) | 4.95 |
| Velocità Nominale (rpm) | 1370 / 2100 / 2825 |
| Velocità a Vuoto (rpm) | 2184 / 3276 / 4368 |
| Corrente Nominale (ADC) | 13.6 |
| Corrente di Picco (ADC) | 38.6 |
| Kv (rpm/V) | 105 |
| Kt (Nm/A) | 0.129 |
| Ke (V/krpm) | 10.47 |
| Km (Nm/√W) | 0.3634 |
| Resistenza (mΩ) | 126 |
| Induttanza (µH) | 366.7 |
| Costante di Tempo Meccanica (ms) | 0.16 |
| Costante di Tempo Elettrica (ms) | 2.91 |
| Inerzia (g·cm²) | 215.5 |
Cablaggio del connettore
| Segnale | Specifiche del cavo |
|---|---|
| U | Nero + Cavo in silicone 16# |
| V | Giallo + Cavo in silicone 16# |
| W | Rosso + Cavo in silicone 16# |
| Hu | Giallo + Cavo in silicone 30# |
| Hv | Verde + Cavo in silicone 30# |
| Hw | Blu + Cavo in silicone 30# |
| VCC GND | Rosso + Cavi 30# & Nero + Cavi 30# |
Corrispondenza del cablaggio: Hu-U, Hv-V, Hw-W
Ulteriori evidenze
RI100 Versione Aumentata del Rotore: Altezza del rotore aumentata di 2mm per migliorare la compatibilità con i sensori Hall.
-
Eccellenza nella Carica Manuale: Bobine di rame avvolte con precisione con uno spazio di 0,5 mm per una migliore assemblaggio e alta densità di coppia.
-
Rotore a Magneti Permanenti Curvi: Garantisce caratteristiche BEMF migliorate per un migliore controllo sinusoidale.
-
Opzioni di Encoder Personalizzate: Supporta una varietà di encoder ad alta precisione tra cui Renishaw e Sick.
-
Ingranaggio Ottimizzato: Progettato con una bassa coppia di cogging e ottima dinamica degli ingranaggi, garantendo basso rumore, funzionamento fluido e forte accelerazione.
Applicazioni
-
Bracci robotici collaborativi (Cobot)
-
esoscheletri robotici indossabili
-
Robot a zampe/quadrupedi
-
Giunti robotici di precisione e end-effector
-
Sistemi di automazione e ispezione compatti
Download manuali
![]() RI100 senza sensore hall-3D.zip
RI100 senza sensore hall-3D.zip
Dettagli
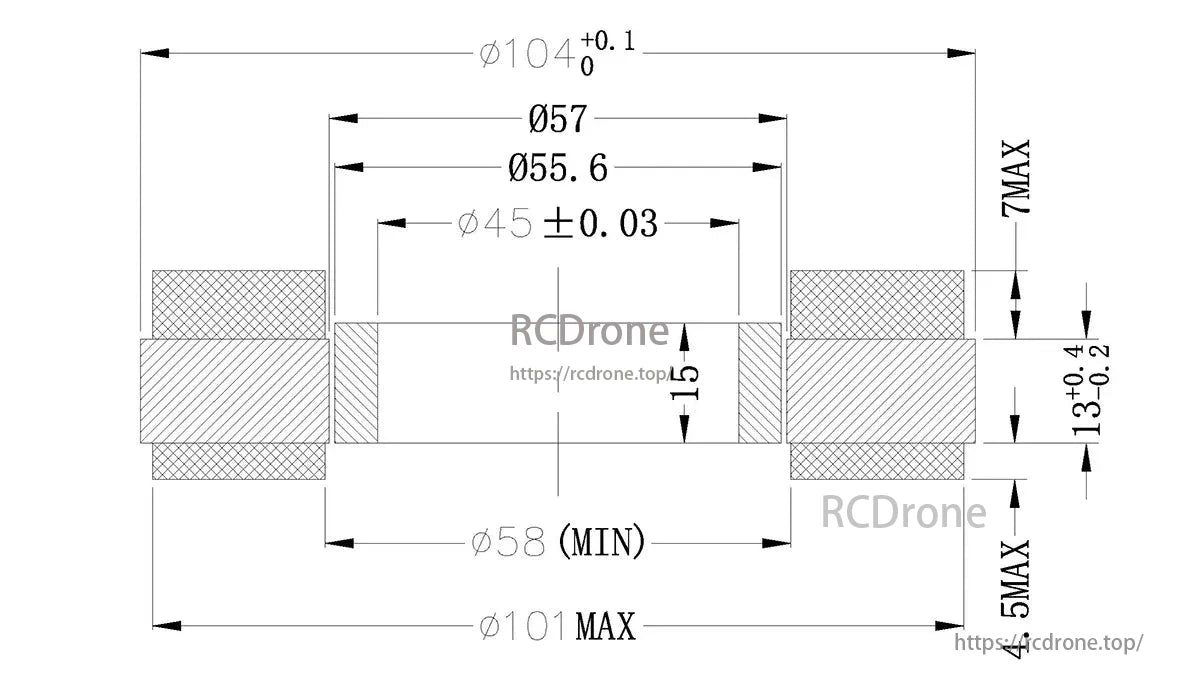
Dimensioni del motore a coppia CubeMars RI100: Ø104, Ø57, Ø55.6, Ø45, 15mm, Ø58, Ø101.
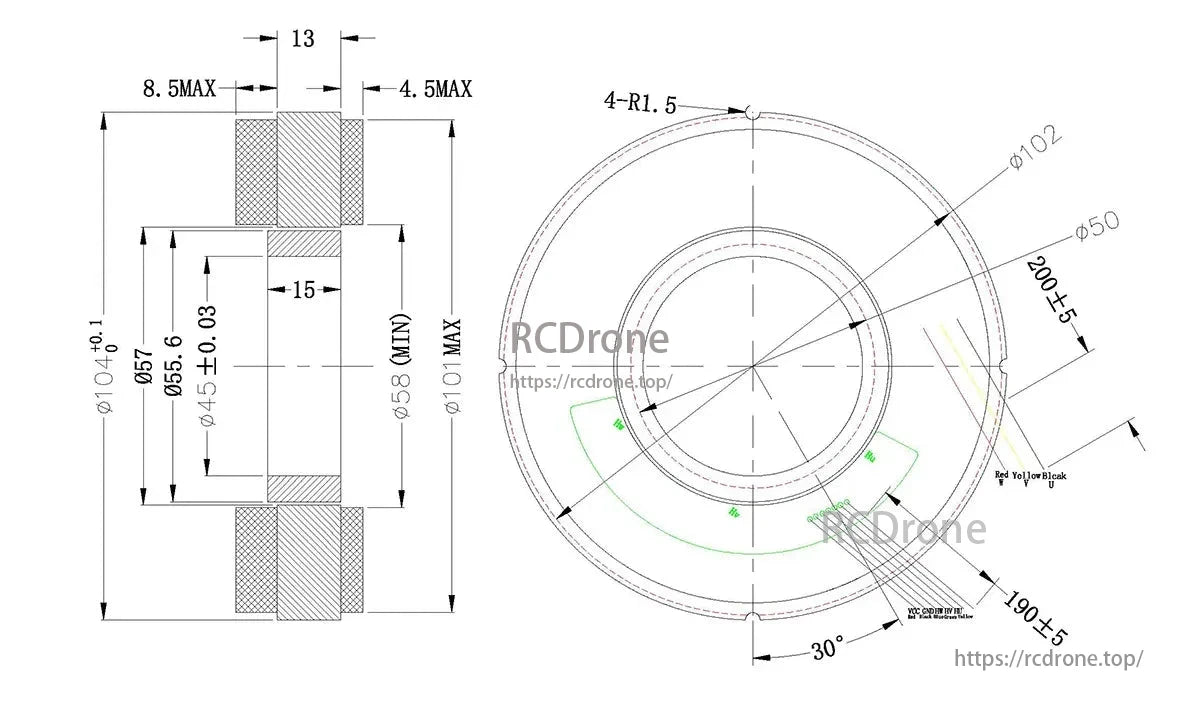
Dimensioni del motore a coppia: Ø104, Ø57, Ø55.6, Ø45±0.03, Ø58, Ø101 max, 200±5, 190±5, angolo di 30°, caratteristiche 4-R1.5.
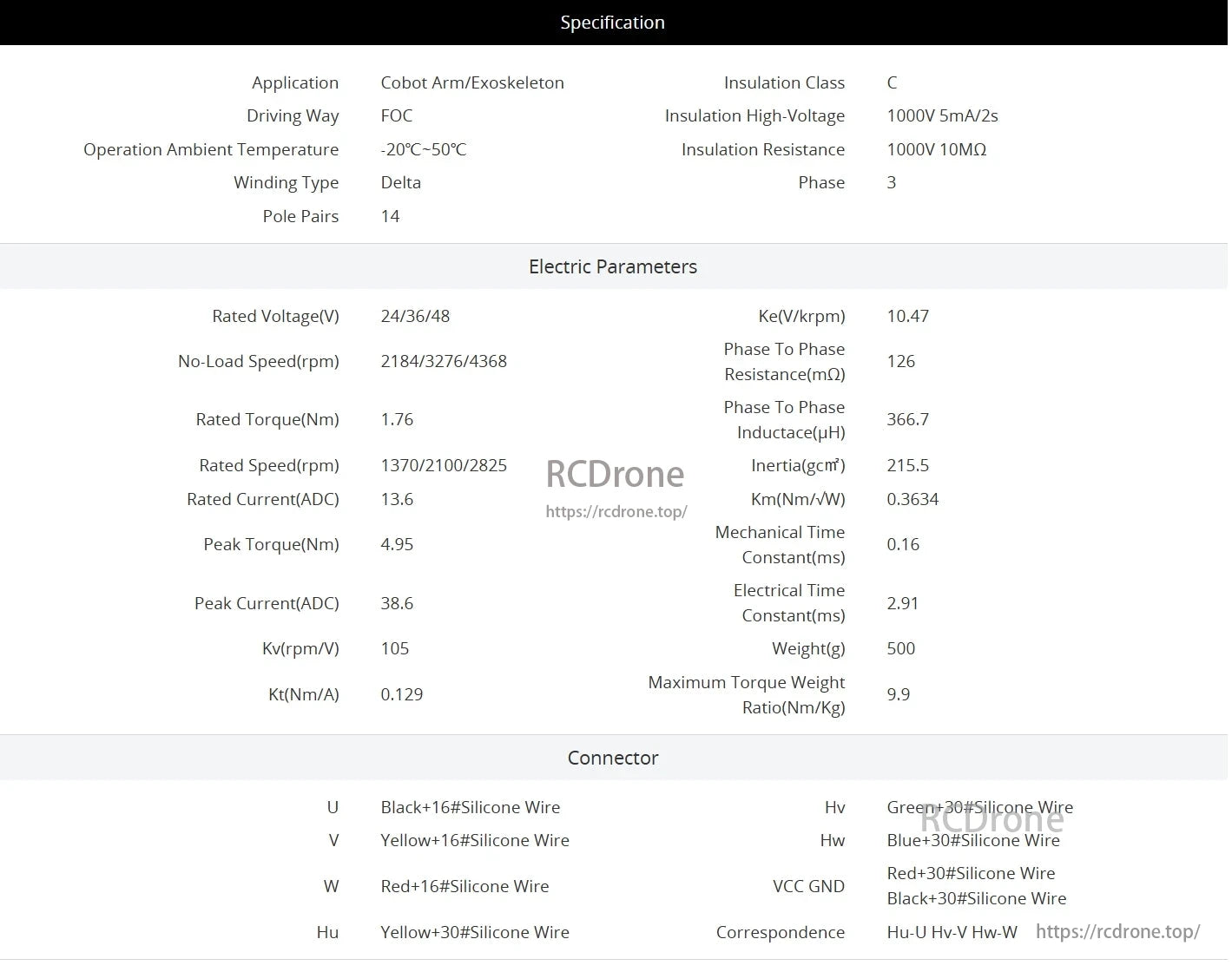
CubeMars Motore a coppia RI100: 24/36/48V, coppia di 1.76Nm, 1370/2100/2825rpm, corrente di 13.6A, picco di 38.6A, 10.47V/krpm, induttanza di 366.7μH, inerzia di 215.5gcm², rapporto coppia massima/peso di 9.9Nm/Kg, operatività da -20°C a 50°C.

CubeMars RI100 KV105@24VDC analgrafico di analisi. Mostra la coppia (N.m) rispetto alla potenza in uscita (W), efficienza, corrente (A) e velocità (RPM). Il grafico evidenzia le caratteristiche di prestazione del motore sotto carichi variabili.
Motore di coppia CubeMars RI100: coppia di cogging ridotta, funzionamento fluido, basso rumore, forte dinamica.
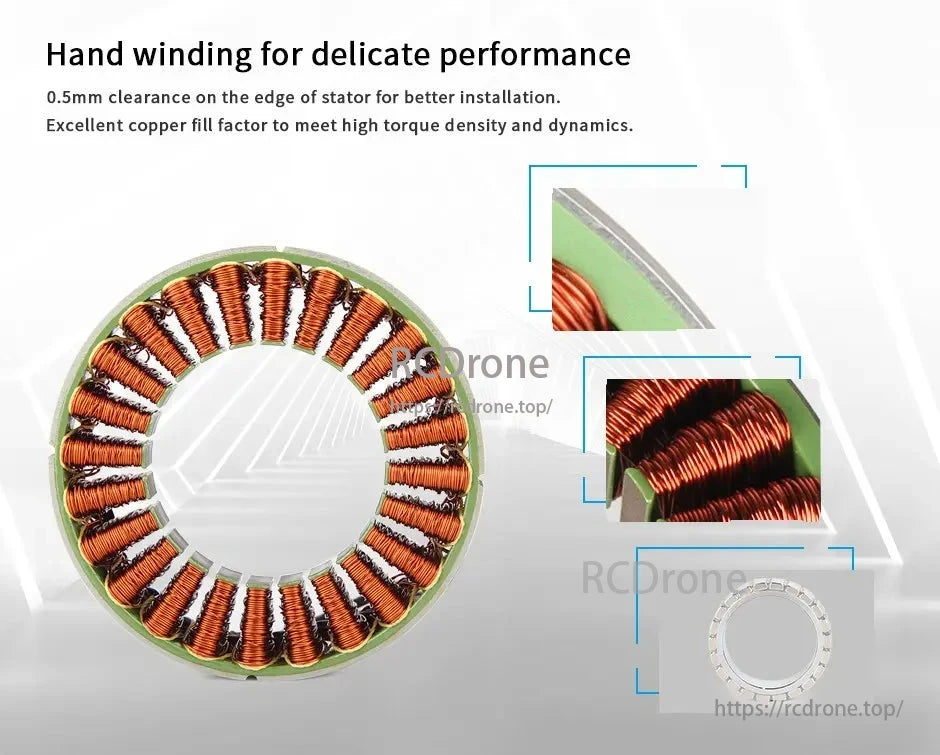
Statore avvolto a mano con uno spazio di 0,5 mm per prestazioni ottimali.

Versione elevata del rotore RI100. Altezza complessiva aumentata di 2 mm per un miglior rilevamento del sensore Hall.
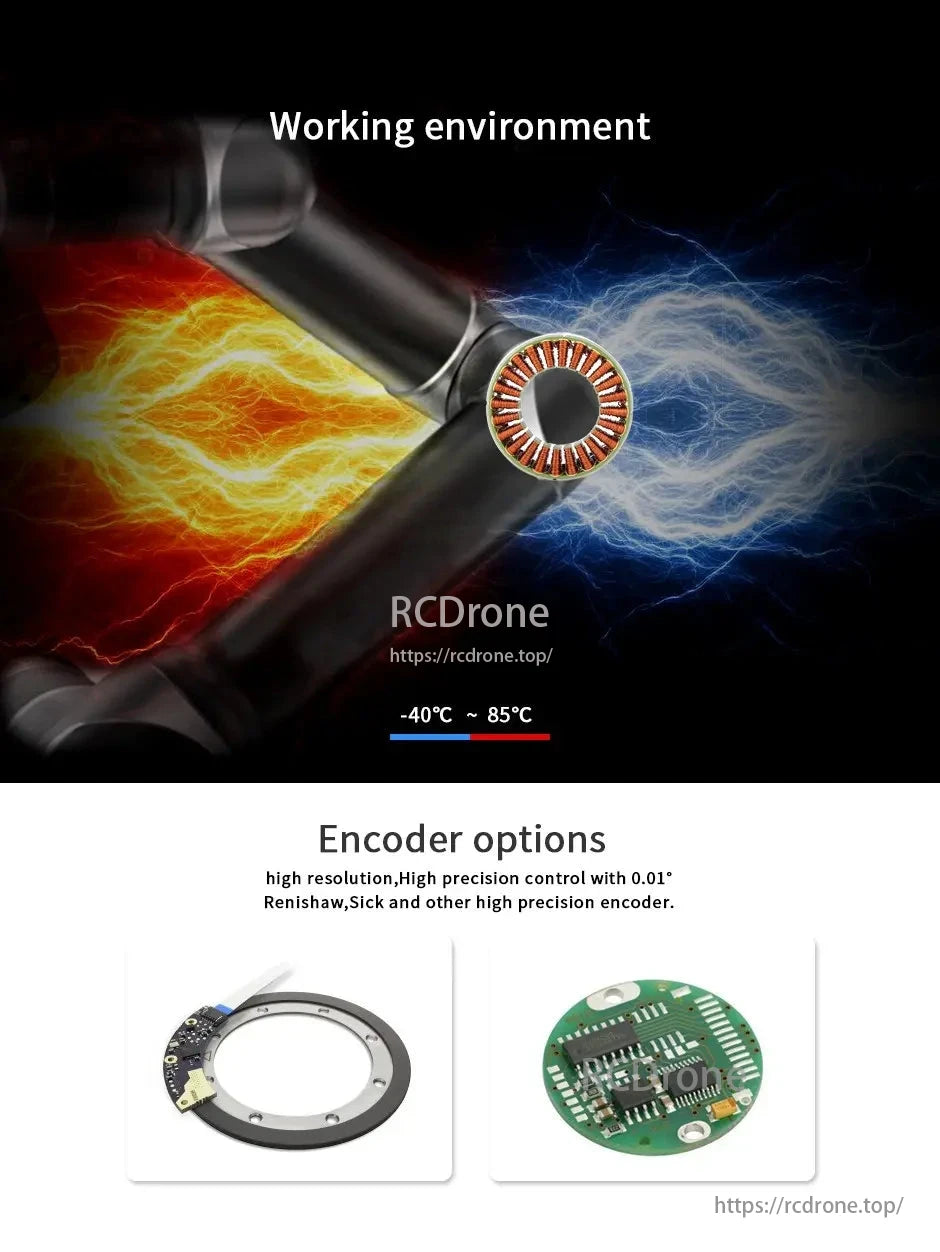
Motore di coppia CubeMars RI100: da -40°C a 85°C, opzioni di encoder ad alta precisione.
Related Collections






