




CubeMars RI60 KV120 Motore Torque Inrunner Senza Telaio | 0,57Nm, 120KV, 48V BLDC per Cobot ed esoscheletro
CubeMars RI60 KV120 Motore Torque Inrunner Senza Telaio | 0,57Nm, 120KV, 48V BLDC per Cobot ed esoscheletro
CubeMars
Impossibile caricare la disponibilità di ritiro
Panoramica
Il motore a coppia senza telaio CubeMars RI60 KV120 è progettato per applicazioni robotiche compatte e ad alte prestazioni. Supportando tensioni di funzionamento 24V/36V/48V, questo motore BLDC senza telaio offre alta densità di coppia, movimento fluido a bassa cogging, e risoluzione di controllo precisa di 0,01°. Con un diametro esterno compatto di Φ60mm e un peso di soli 155,9g, è ideale per bracci cobot, esoscheletri, e giunti robotici con vincoli di spazio ristretti.
Questo motore presenta uno statore avvolto a mano per un fattore di riempimento del rame ottimale, magneti permanenti curvi per una risposta BEMF sinusoidale efficiente, e opzioni per integrazione del sensore Hall e integrazione dell'encoder.Supporta il Controllo Orientato al Campo (FOC), opera in modo affidabile da -20°C a 50°C, e resiste fino a 1.63 Nm di coppia di picco. La versione con rotore potenziato migliora la precisione del sensore Hall aumentando il range di rilevamento di 2mm.
Caratteristiche Principali
-
Design BLDC Inrunner Senza Telaio – Nessun involucro esterno, ideale per installazioni integrate
-
Alta Densità di Coppia – Massimo rapporto coppia/peso di 10.46 Nm/kg
-
Controllo di Precisione – Compatibile con encoder ad alta risoluzione, supporta 0.01° posizionamento
-
Momento di Cogging Basso – Funzionamento fluido, vibrazioni e rumore ridotti
-
Resistente alla Temperatura – Funziona in temperature ambientali da -20°C a 50°C
-
Interfacce di Controllo Multiple – Supporta feedback da encoder e sensori Hall
-
Statore Avvolto a Mano – Eccellente riempimento in rame, 0.5mm di spazio ai bordi per un'assemblaggio facile
-
Versione del rotore opzionale – +2mm di altezza del rotore migliora l'allineamento del sensore hall
Specifiche tecniche
Applicazione & Configurazione
| Parametro | Valore |
|---|---|
| Applicazione | Braccio Cobot / Eseoscheletro |
| Modalità di azionamento | FOC |
| Fase | 3 Fasi |
| Tipo di avvolgimento | Delta |
| Coppie di poli | 14 |
| Classe di isolamento | C |
| Voltaggio di isolamento | 500V 5mA/2s |
| Resistenza di isolamento | 500V 10MΩ |
| Temperatura di esercizio | -20℃ ~ 50℃ |
Caratteristiche Elettriche
| Parametro | Valore |
|---|---|
| Voltaggio Nominale (V) | 24 / 36 / 48 |
| Velocità a Vuoto (rpm) | 2532 / 3798 / 5064 |
| Velocità Nominale (rpm) | 1440 / 2320 / 3190 |
| Momento Torcentale Nominale (Nm) | 0.57 |
| Momento Torcentale di Picco (Nm) | 1.63 |
| Corrente Nominale (ADC) | 5.6 |
| Corrente di Picco (ADC) | 16.8 |
| Kv (rpm/V) | 120 |
| Ke (V/krpm) | 9.03 |
| Kt (Nm/A) | 0.100 |
| Resistenza di Fase (mΩ) | 900 |
| Induttanza di Fase (μH) | 877.5 |
| Inerzia (g·cm²) | 33.05 |
| Km (Nm/√W) | 0.1054 |
| Costante di Tempo Meccanica (ms) | 0.3 |
| Costante di Tempo Elettrica (ms) | 0.98 |
| Peso (g) | 155.9 |
| Rapporto Coppia/Peso | 10.46 Nm/kg |
Opzioni di Encoder & Sensore Hall
-
Con Sensore Hall: Rilevamento migliorato del rotore, raccomandato per la rilevazione di posizione ad alta precisione
-
Senza Sensore Hall: Design compatto per ambienti ristretti
-
Encoder supportati: Renishaw, Sick, altri encoder ad alta precisione (0.01° risoluzione)
Dimensioni Meccaniche
| Versione | Diametro Esterno | Diametro Interno | Altezza del Rotore | Spessore Max |
|---|---|---|---|---|
| Senza Hall | Ø60 mm | Ø30 mm | 15 mm | 21 mm (max) |
| Con Hall | Ø60 mm | Ø30 mm | 15 mm | 23 mm (max) |
Fare riferimento ai disegni tecnici per tolleranze esatte e schemi di fori di montaggio.
Curva di Prestazione
Testato a 24VDC:
-
Massima efficienza a ~0.3 Nm
-
Potenza di uscita di picco >125W a ~1.1 Nm
-
Velocità massima ~2500 RPM
-
Risposta di corrente stabile su tutta la gamma di coppia
Informazioni su cablaggio e connettori
| Filo | Colore + Dimensione |
|---|---|
| U | Nero + Silicone 18# |
| V | Giallo + Silicone 18# |
| W | Rosso + Silicone 18# |
| Hu | Blu + Silicone 30# |
| Hv | Verde + Silicone 30# |
| Hw | Giallo + Silicone 30# |
| VCC | Rosso + Silicone 30# |
| GND | Nero + Silicone 30# |
Mappa di cablaggio:
Hu-U, Hv-V, Hw-W
Download manuali
![]() RI60 senza sensore Hall-3D.zip
RI60 senza sensore Hall-3D.zip
Applicazioni
-
Bracci robotici collaborativi
-
Giunti per esoscheletri
-
Robot a zampe e quadrupedi
-
Robotica medica di precisione
-
Moduli servo incorporati
Dettagli
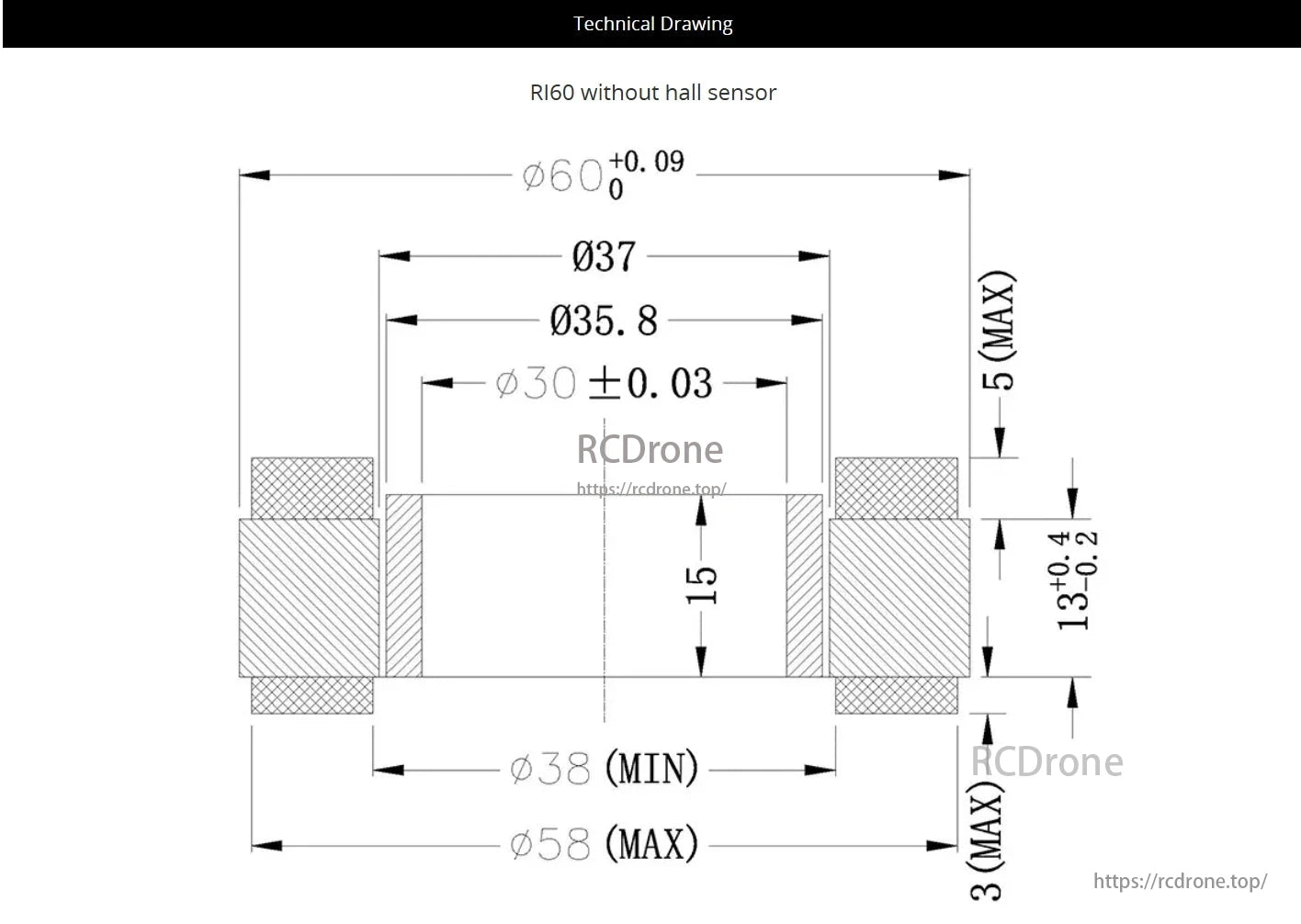
CubeMars Dimensioni del motore RI60: Ø60, Ø37, Ø35.8, Ø30, Ø38 (min), Ø58 (max), 15 lunghezza, 5 altezza massima, 13 ±0.4 larghezza.
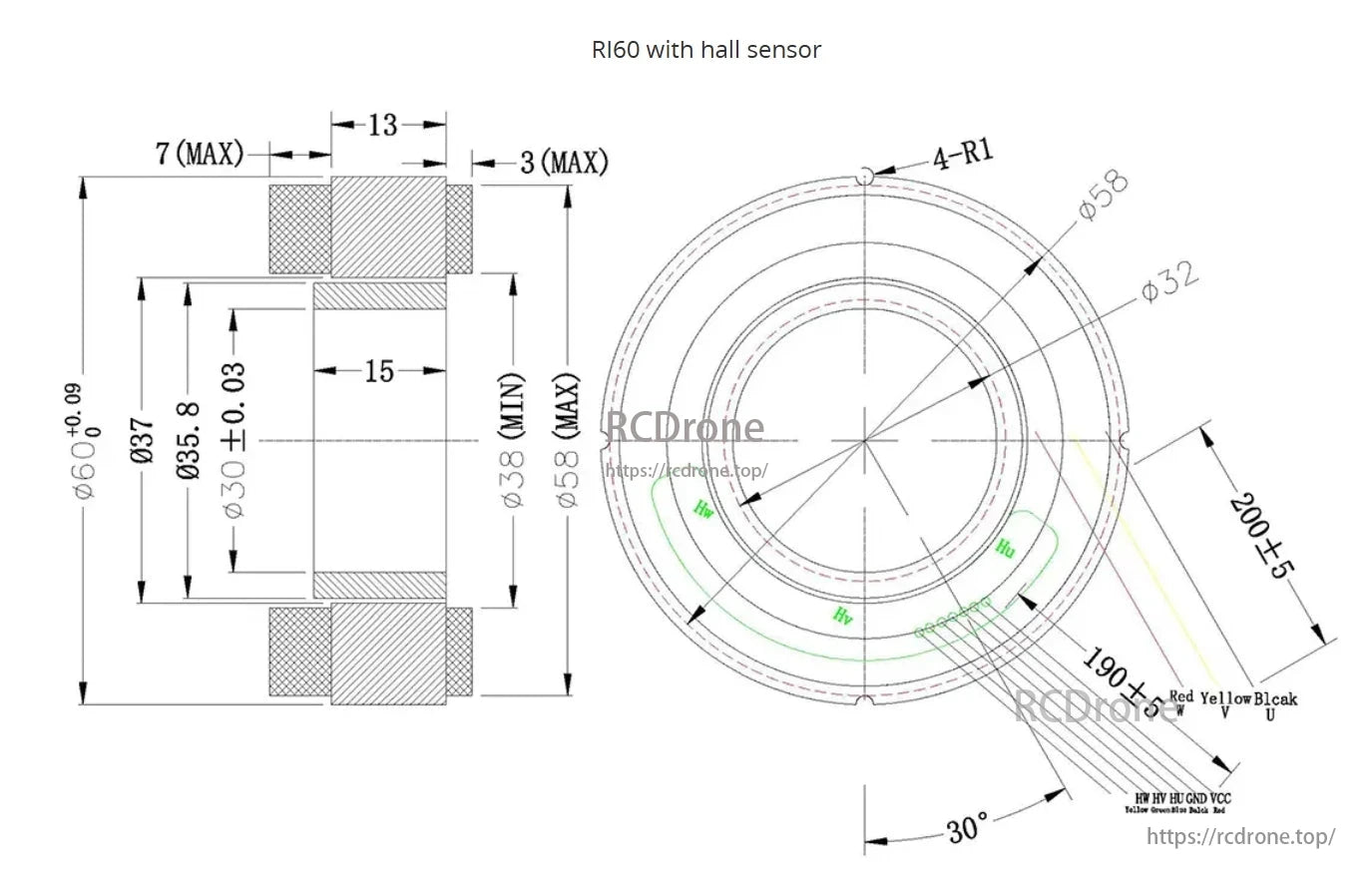
Motore CubeMars RI60 con sensore Hall. Dimensioni: diametro 60mm, lunghezza 200mm. Caratteristiche: marcature 4-R1, φ58, φ32 e angoli di 30°. Include etichette HW, HV, HU.
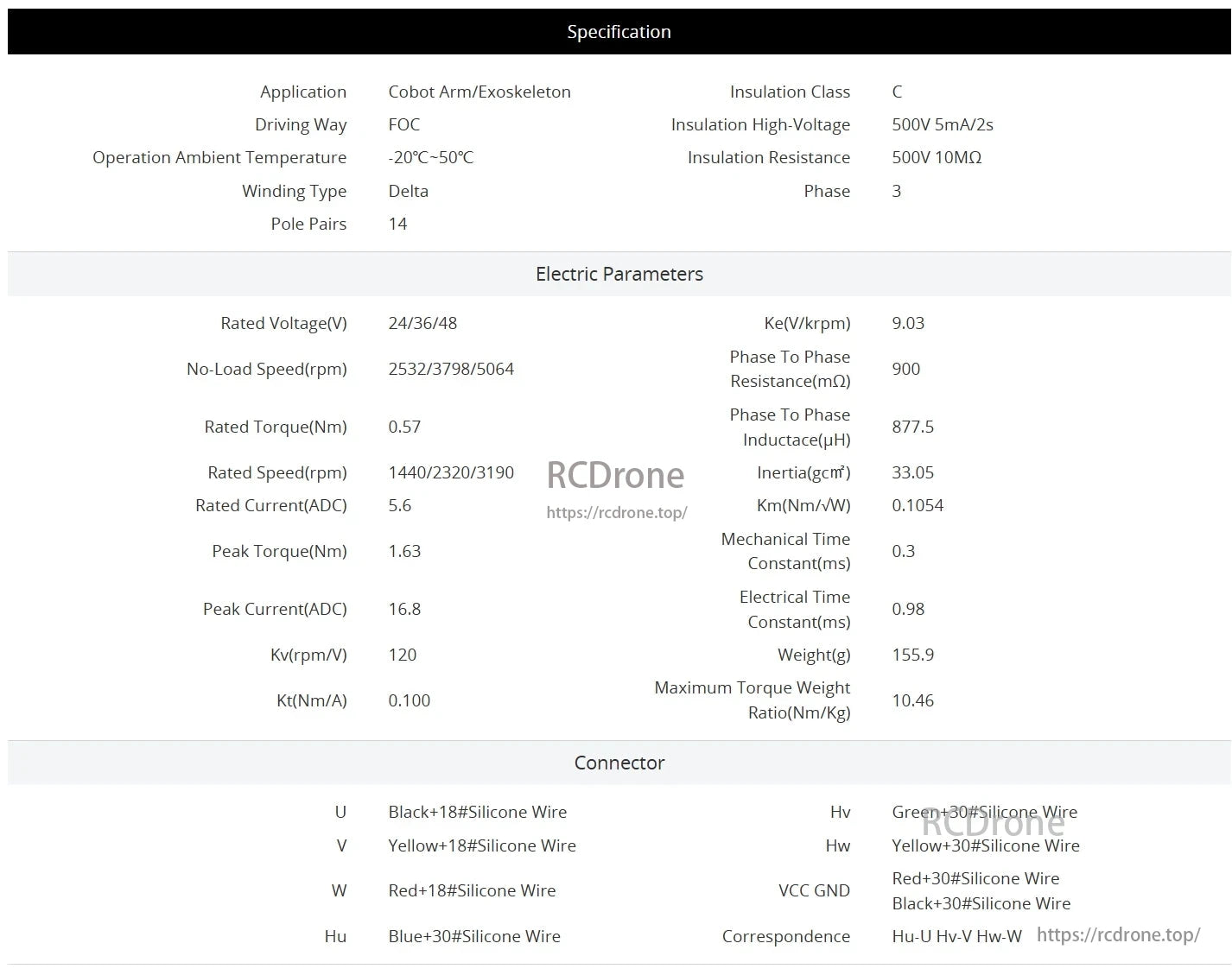
Motore CubeMars RI60: applicazione per braccio cobot/exoscheletro, guida FOC, operatività da -20°C a 50°C, 14 coppie di poli. Tensione nominale 24/36/48V, velocità a vuoto 2532/3798/5064rpm, coppia nominale 0.57Nm, coppia di picco 1.63Nm.
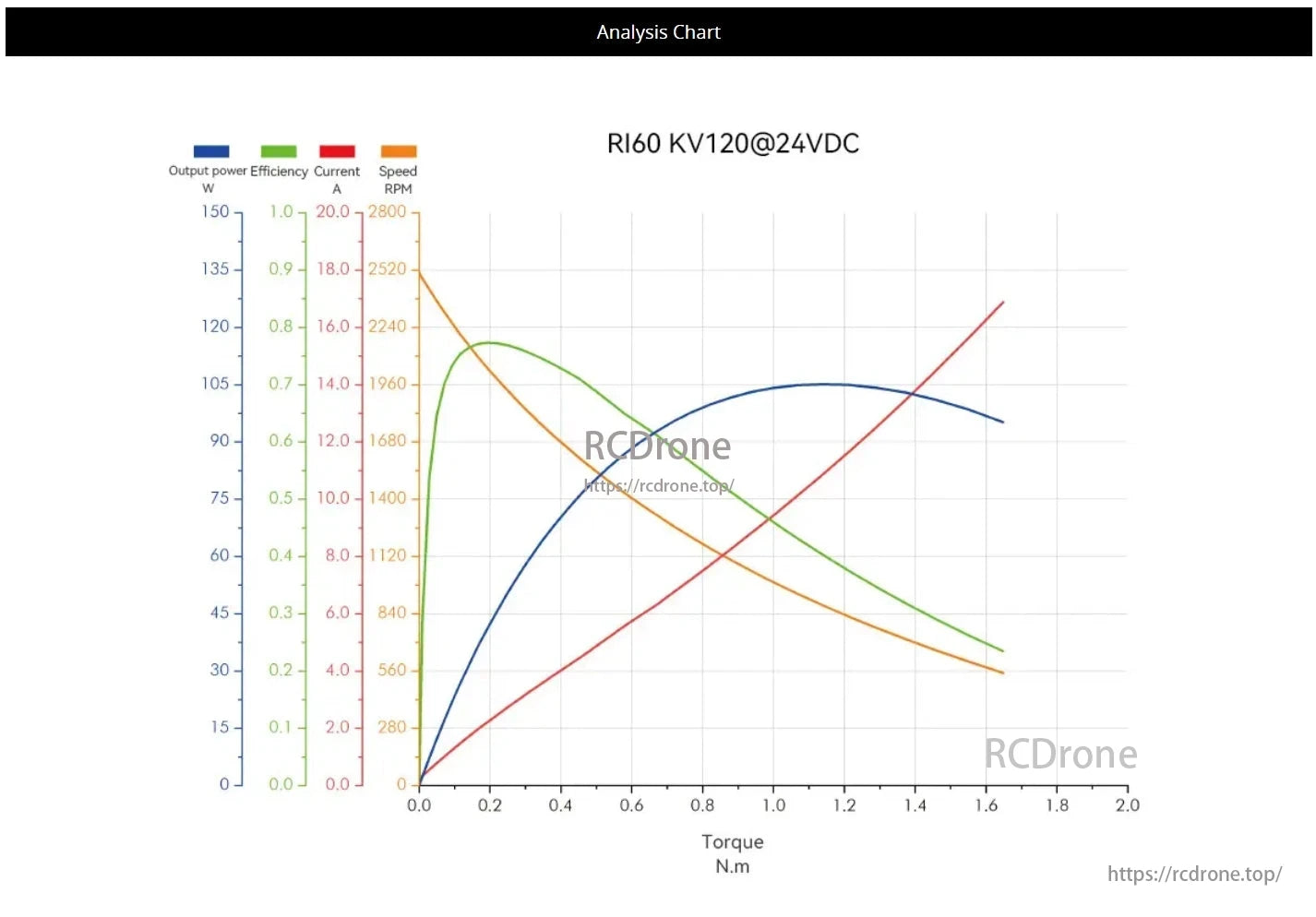
Grafico di analisi del motore CubeMars RI60 a KV120@24VDC. Dispmostra potenza in uscita, efficienza, corrente e velocità in funzione della coppia. L'efficienza raggiunge il picco vicino a 0.2 N.m, con la velocità che diminuisce all'aumentare della coppia.
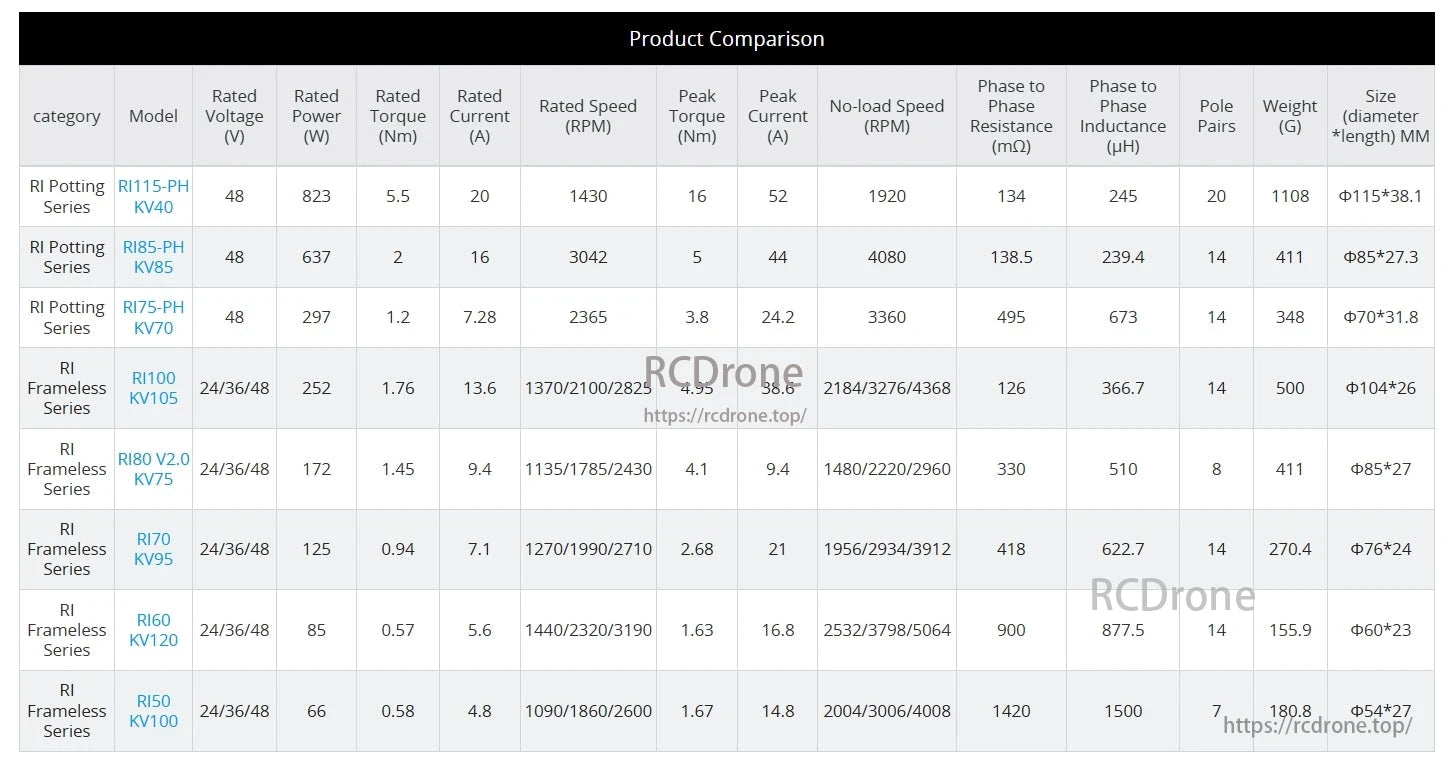
Motore CubeMars RI60 KV120: 24/36/48V, 85W, coppia di 0.57Nm, corrente di 5.6A, velocità di 1440/2320/3190 RPM, coppia di picco di 1.63Nm, corrente di picco di 16.8A, resistenza di 900mΩ, induttanza di 877.5µH, 14 coppie di poli, peso di 155.9g, dimensioni φ60*23mm.

Motore CubeMars RI60: coppia di cogging ridotta, funzionamento fluido, basso rumore, forte dinamica.

Statore avvolto a mano con uno spazio di 0,5 mm per prestazioni ottimali.

Magnete permanente curvo per design del motore BEMF Sinus, garantendo un controllo facile.

Versione Elevata del Rotore RI60. Altezza complessiva aumentata di 2 mm per una migliore rilevazione del sensore Hall.
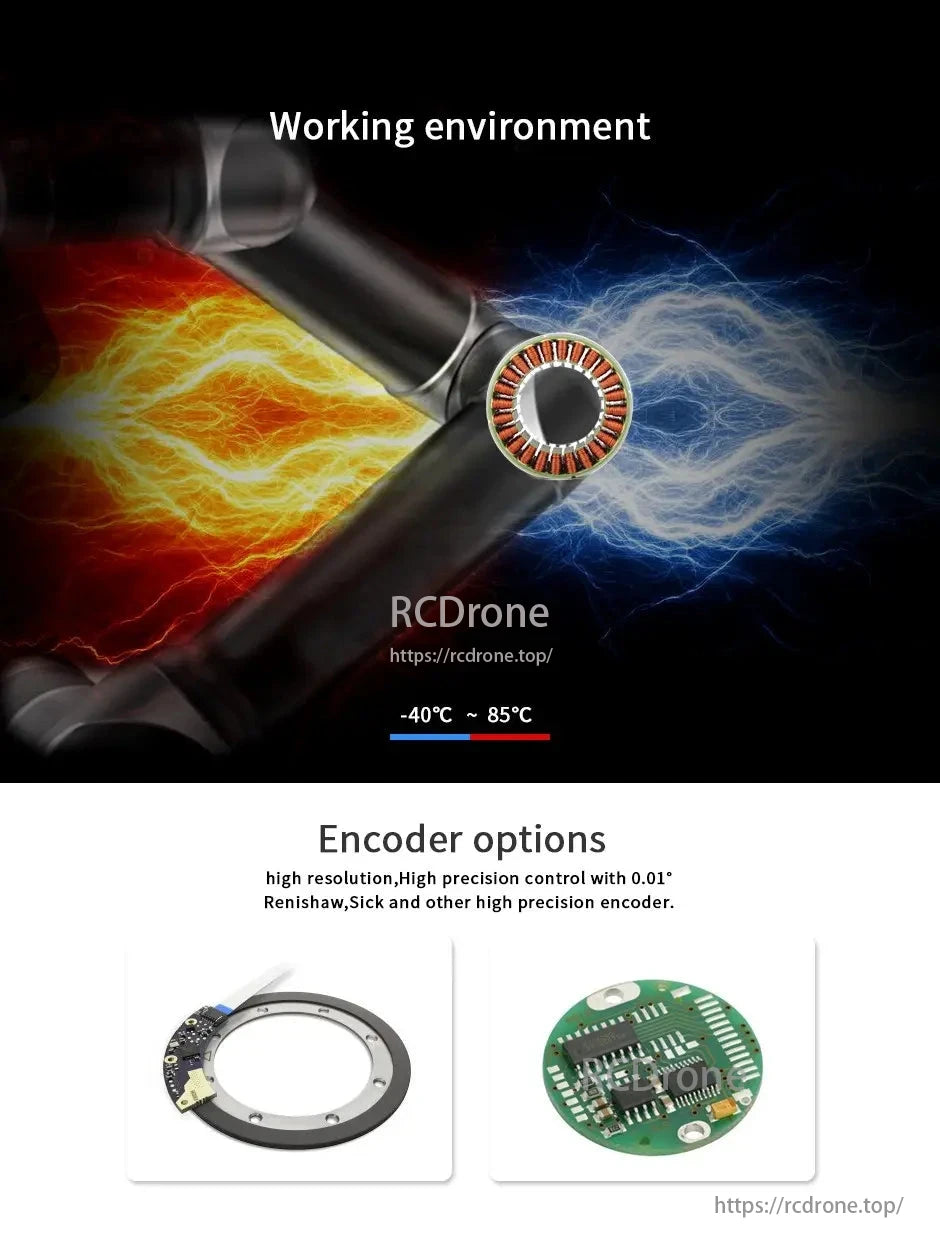
Motore CubeMars RI60: da -40°C a 85°C, opzioni di encoder ad alta risoluzione.
Related Collections




