



DAMIAO DM-2325 24 V, 380 rpm, 5 N·m Motore Robot con Riduttore 1:25, CAN/FD CAN e Encoder Incrementale
DAMIAO DM-2325 24 V, 380 rpm, 5 N·m Motore Robot con Riduttore 1:25, CAN/FD CAN e Encoder Incrementale
DAMIAO
Prezzo di listino
$45.00 USD
Prezzo di listino
Prezzo scontato
$45.00 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
Il DAMIAO DM-2325 è un motore robotico compatto progettato per un controllo preciso del movimento nella robotica. Presenta un feedback dell'encoder incrementale, interfacce di controllo CAN/FD e configurazione UART. Con un rapporto di riduzione di 1:25, alimentazione a 24 V e modalità di controllo definite, è adatto per applicazioni che richiedono una regolazione affidabile della velocità e della posizione.
Caratteristiche principali
- Modello: DM-2325
- Tensione nominale: 24 V
- Corrente nominale: 5 A / 3.2 A; Corrente di picco: 13 A / 7.5 A
- Momento torcentale nominale: 5 N·m; Momento torcentale di picco: 2 N·m
- Velocità nominale: 380 rpm; Velocità massima a vuoto: 560 rpm
- Rapporto di riduzione: 1:25; Coppie di poli: 7
- Induttanza di fase: 75 μH; Resistenza di fase: 0.2915 Ω
- Carico radiale massimo: 395 N
- Dimensioni: 28 mm di diametro esterno; 77.6 mm di altezza
- Peso del motore: 172.
- 2 g
- Tipo di encoder: Encoder incrementale
- Interfaccia di controllo: CAN@1 Mbps (Max), FD CAN@5 Mbps (Max)
- Interfaccia di configurazione: UART@921600 bps
- Modalità di controllo: Modalità MIT, Modalità Velocità, Modalità Posizione
Specifiche
| Modello | DM-2325 |
| Tensione Nominale | 24 V |
| Corrente Nominale | 5 A / 3.2 A |
| Corrente di Picco | 13 A / 7.5 A |
| Momento Torcentale Nominale | 5 N·m |
| Momento Torcentale di Picco | 2 N·m |
| Velocità Nominale | 380 rpm |
| Velocità Massima a Vuoto | 560 rpm |
| Rapporto di Riduzione | 1:25 |
| Coppie di Poli | 7 |
| Induttanza di Fase | 75 μH |
| Resistenza di Fase | 0.html 2915 Ω |
| Carico Radiale Massimo | 395 N |
| Diametro Esterno | 28 mm |
| Altezza | 77.6 mm |
| Peso del Motore | 172.2 g |
| Tipo di Encoder | Encoder incrementale |
| Interfaccia di Controllo | CAN@1 Mbps (Max), FD CAN@5 Mbps (Max) |
| Interfaccia di Configurazione | UART@921600 bps |
| Modalità di Controllo | Modalità MIT; Modalità Velocità; Modalità Posizione |
Protezione
- Protezione da surriscaldamento del drive; temperatura di protezione: 120 °C. Il surriscaldamento esce dalla "modalità abilitata".
- Protezione da surriscaldamento del motore; impostata in base ai requisiti d'uso (si consiglia di non superare i 100 °C). Il surriscaldamento esce dalla "modalità abilitata".
- Protezione da sovratensione del motore; impostata in base ai requisiti d'uso (si consiglia di non superare i 60 V). La sovratensione esce dalla "modalità abilitata". html
- Protezione contro la perdita di comunicazione; se non viene ricevuto alcun comando CAN entro il periodo impostato, il sistema esce dalla "modalità abilitata".
- Protezione da sovracorrente del motore; impostata in base ai requisiti d'uso (si consiglia di non superare i 13 A). La sovracorrente esce dalla "modalità abilitata".
- Protezione da sottotensione del motore; se la tensione di alimentazione è inferiore al valore impostato, esce dalla "modalità abilitata" (tensione di alimentazione non inferiore a 15 V).
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Manuali e Download
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_disegno_di_installazione.pdf
- DM-2325_disegno_di_installazione_armatura.pdf
Disegno di Installazione
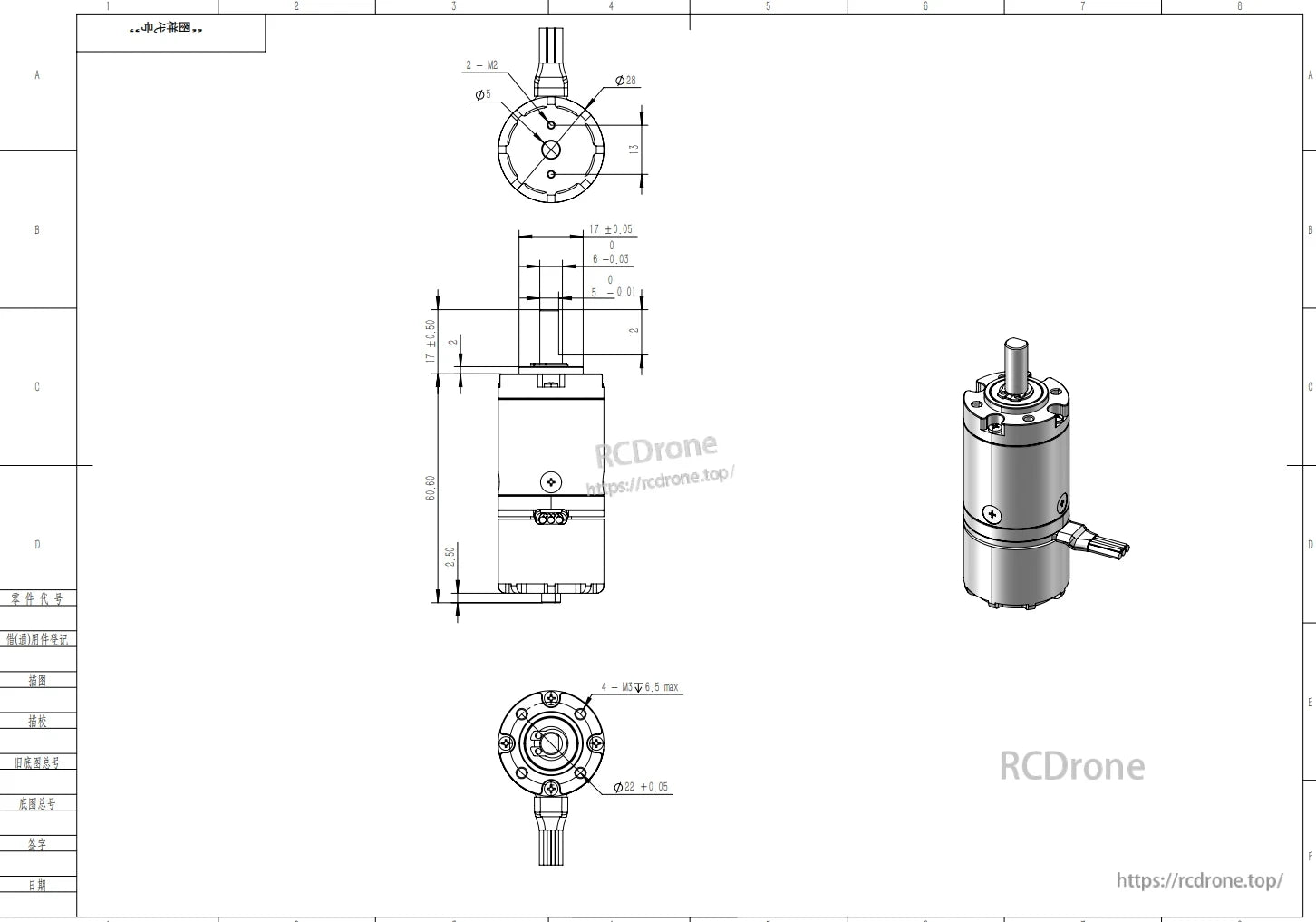
Disegno tecnico del motore robot con dimensioni e specifiche
Disegno tecnico del motore robot con dimensioni e specifiche

Disegno tecnico del motore robot con dimensioni e vista 3D
Related Collections




- Scegliendo una selezione si ottiene un aggiornamento completo della pagina.
- Si apre in una nuova finestra.