




Motore robot DAMIAO DM-J4310-2EC, 24V, 3 N.M nominali, 7 N.M di picco, 120 RPM, CAN@1Mbps, UART@921600bps
Motore robot DAMIAO DM-J4310-2EC, 24V, 3 N.M nominali, 7 N.M di picco, 120 RPM, CAN@1Mbps, UART@921600bps
DAMIAO
Prezzo di listino
$124.99 USD
Prezzo di listino
Prezzo scontato
$124.99 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
DAMIAO DM-J4310-2EC è un motore robotico compatto con ingranaggi integrati e doppi encoder magnetici per un controllo preciso del movimento. Funziona a 24 V e fornisce una coppia nominale di 3 N.M, una coppia di picco di 7 N.M e una velocità nominale di 120 RPM tramite uno stadio di riduzione 10:1. Il controllo e la configurazione sono supportati tramite CAN@1Mbps e UART@921600bps.
Caratteristiche principali
- Funzionamento a 24 V con corrente nominale di 2.5A e corrente di picco di 7.5A
- Riduzione 10:1 per un'alta uscita di coppia: 3 N.M nominale, 7 N.M di picco
- Doppi encoder magnetici a singolo giro, risoluzione 14Bit
- Dimensioni compatte e leggero: diametro esterno di 57mm, altezza di 46mm, 300g
- Interfaccia di controllo CAN@1Mbps; configurazione UART@921600bps
Specifiche
| Parametro | Valore |
|---|---|
| Modello | DM-J4310-2EC |
| Tensione nominale | 24 V |
| Corrente nominale | 2.5A |
| Corrente di picco | 7.5A |
| Momento torcentale nominale | 3 N.M |
| Momento torcentale di picco | 7 N.M |
| Velocità nominale | 120 RPM |
| Max.html | |
| Velocità a vuoto | 200 RPM |
| Rapporto di riduzione | 10:1 |
| Coppie di poli | 14 |
| Induttanza di fase | 340uH |
| Resistenza di fase | 650 mOhm |
| Diametro esterno | 57mm |
| Altezza | 46mm |
| Peso del motore | 300g |
| Risoluzione dell'encoder | 14Bit |
| Quantità di encoder | 2 |
| Tipo di encoder | Encoder magnetico a giro singolo |
| Interfaccia di controllo | CAN@1Mbps |
| Interfaccia di configurazione | UART@921600bps |
Dimensioni del motore
- Diametro esterno: 57mm
- Altezza totale: 46mm; lunghezza del corpo: 45mm
- Cerchio di bulloni della faccia anteriore: 6 x M3, profondità del foro 5; diametro del cerchio 50mm
- Cerchio di bulloni della faccia posteriore: 4 x M3, profondità del foro 4; diametro del cerchio 38mm
- Cerchio interno: 24. html 30mm
- Tre fori: 4mm (+0.04 / +0.02)
- Due fori: 3mm (+0.04 / +0.02), profondità 5
- Angolo di caratteristica: 15°
Applicazioni
- Robot Umani
- Bracci Robotici
- Eseoscheletri
- Robot Quadrupedi
- Veicoli AGV
- Robot ARU
Integrazione Open Source
OpenArm è un braccio robotico umanoide completamente open-source progettato per la ricerca e l'implementazione dell'IA fisica in ambienti ricchi di contatto.
Manuali
- DAMIAO_DM_J4310_2EC_V1.1_Motor.stp
- DM-J4310-2EC_Gear_Motor_Instructions.pdf
- DM_J4310_V1.1_disegno_di_installazione.pdf
Dettagli

Disegno tecnico del motore robot con dimensioni e specifiche
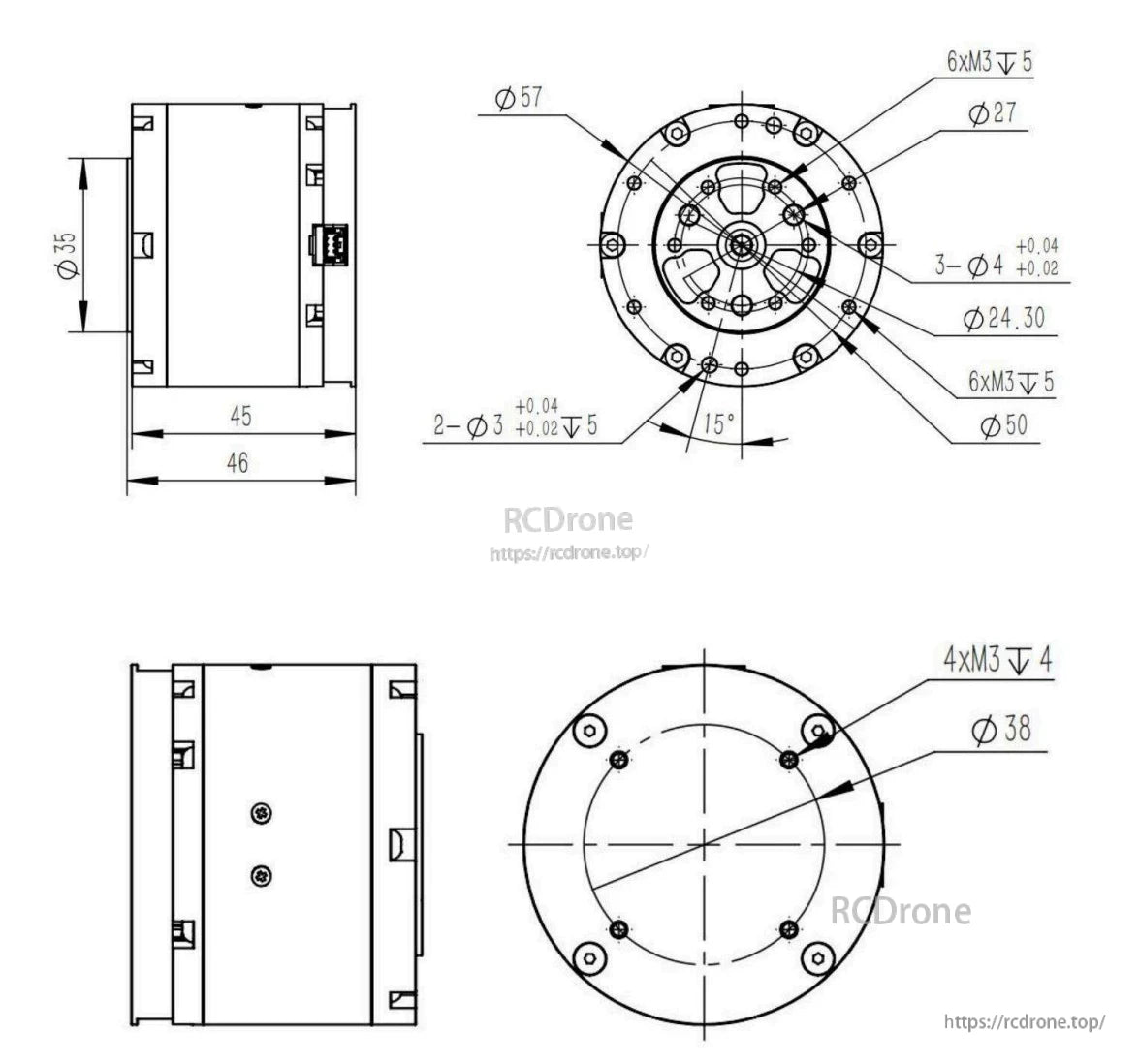
Specifiche, dimensioni e disegni meccanici del motore robot DAMIAO DM-J4310-2EC inclusi.
Related Collections




