




DFRobot SEN0142 MPU6050 Modulo IMU Giroscopio Accelerometro 6 DOF con Processore Digitale di Movimento I2C per Arduino & Robotica
DFRobot SEN0142 MPU6050 Modulo IMU Giroscopio Accelerometro 6 DOF con Processore Digitale di Movimento I2C per Arduino & Robotica
DFRobot
Impossibile caricare la disponibilità di ritiro
Panoramica
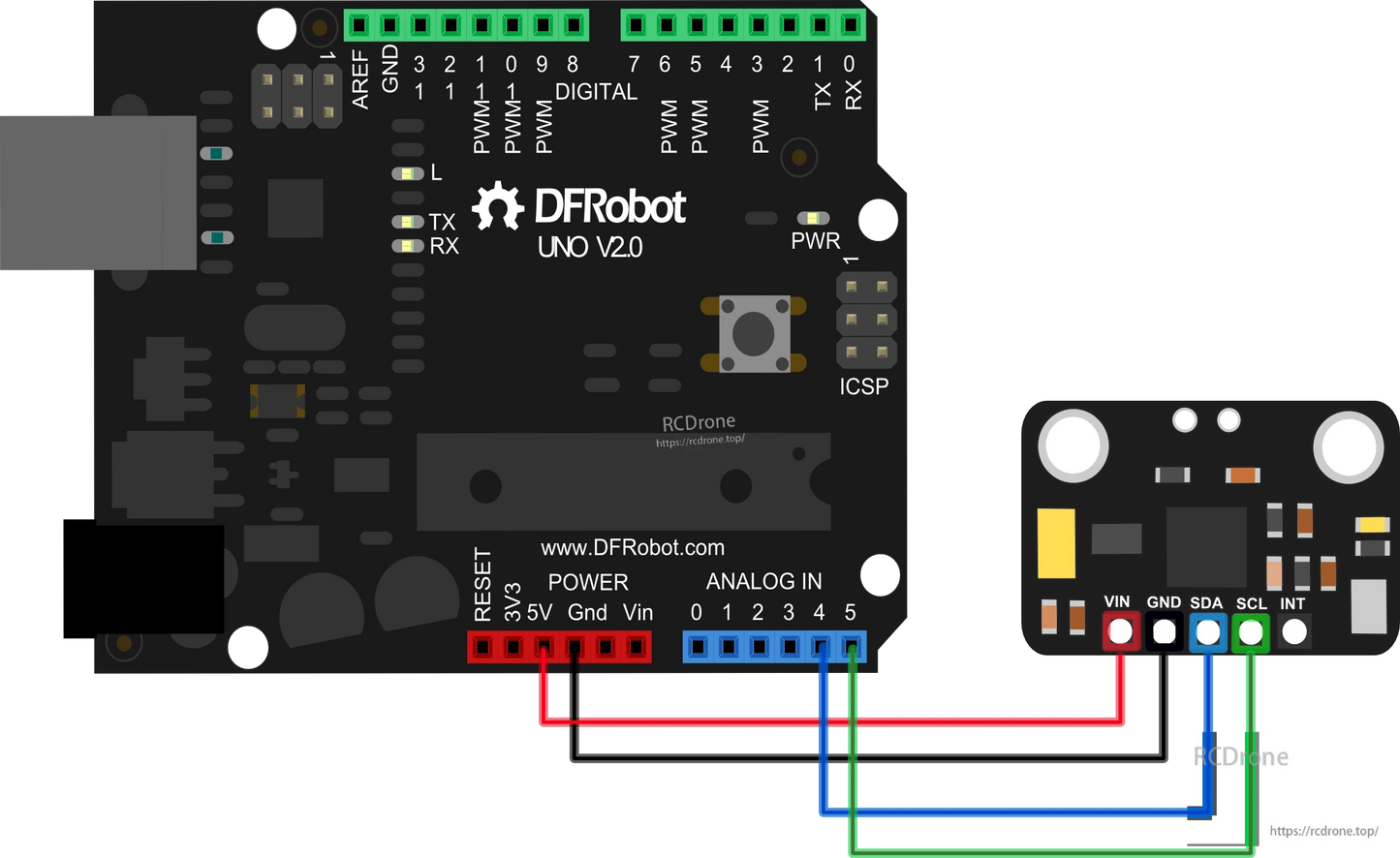
Il DFRobot SEN0142 modulo IMU MPU6050 a 6 DOF integra un giroscopio a 3 assi e un accelerometro a 3 assi su un singolo chip, fornendo una rilevazione del movimento accurata per robotica, droni, dispositivi indossabili e progetti Arduino. Dotato di un Processore di Movimento Digitale (DMP), supporta algoritmi avanzati di MotionFusion a 6 assi e 9 assi, abilitando l'output di dati in quaternioni, angoli di Eulero e dati grezzi dei sensori. Con un ampio intervallo di tensione di ingresso di 3V–5V, l'MPU6050 può essere collegato direttamente ad Arduino e ad altri microcontrollori per il tracciamento del movimento in tempo reale e la rilevazione dei gesti.
Caratteristiche principali
-
Combina giroscopio a 3 assi e accelerometro a 3 assi in un unico chip
-
Intervallo dell'accelerometro programmabile: ±2g, ±4g, ±8g, ±16g
-
Sensibilità del giroscopio: ±250, ±500, ±1000, ±2000 dps
-
Processore di movimento digitale (DMP) per MotionFusion e riconoscimento dei gesti a bordo
-
Interfaccia digitale I2C supporta formati di matrice, quaternione, Euler e dati grezzi
-
Calibrazione del bias & della bussola per una maggiore precisione
-
Compatibile con Arduino e dispositivi indossabili tramite I2Cdevlib
Specifiche
-
Tensione di lavoro: 3–5 V
Output: Dati digitali I2C (dati MotionFusion a 6/9 assi)
-
Accelerometro: intervallo programmabile di ±2g / ±4g / ±8g / ±16g
-
Giroscopio: sensibilità di ±250 / ±500 / ±1000 / ±2000 dps
-
Formato dati: matrice di rotazione, quaternione, angolo di Eulero, dati grezzi
-
Dimensioni: 14 × 21 mm
Applicazioni
-
Rilevamento del movimento nei robot
-
Progetti di elettronica Arduino &e fai-da-te
-
Interazione uomo-computer (HCI)
-
Dispositivi indossabili e controllo gestuale
-
Sistemi di navigazione e bilanciamento (e.g., Trasportatori di tipo Segway)
-
Stabilizzazione del drone e tracciamento del movimento
Dettagli



Codice di esempio
Si prega di scaricare le librerie per tutti i sensori IMU prima!




- Scegliendo una selezione si ottiene un aggiornamento completo della pagina.
- Si apre in una nuova finestra.