


BETAFPV F4 2-3S 20A AIO Flight Controller V1, Serial ELRS 2.4G, BEC 9V/5V, DJI O3 6-Pin PMU
BETAFPV F4 2-3S 20A AIO Flight Controller V1, Serial ELRS 2.4G, BEC 9V/5V, DJI O3 6-Pin PMU
BETAFPV
Impossibile caricare la disponibilità di ritiro
Panoramica
Il BETAFPV F4 2-3S 20A AIO FC V1 è un controller di volo AIO progettato per costruzioni HD digitali VTX che utilizzano batterie 2-3S. Combina un ESC da 20A con una soluzione BEC duale (9V@2A for DJI O3 e 5V@3A for dispositivi esterni) per aiutare a mantenere una potenza stabile durante le variazioni di accelerazione. Presenta anche un connettore PMU a 6 pin DJI O3 per un'installazione senza saldature e una porta USB SH1.0 a 4 pin sul retro per la messa a punto e la manutenzione.
Caratteristiche principali
- Tensione di ingresso: 2-3S
- Uscite BEC duali: 9V@2A (DJI O3) e 5V@3A (dispositivi esterni)
- DJI O3 6-pin PMU per un'installazione HD VTX più semplice (nessuna saldatura per il connettore)
- ESC integrato: 20A continuo, 25A di picco; supporto del segnale D-shot300 / D-shot600
- MCU: STM32F405RGT6 @ 168MHz
- Ricevitore integrato: Serial ELRS 2.4G (protocollo CRSF)
- IMU (SPI): ICM42688P / ICM42605 (note grafiche mostrano “@8K”)
- 16MB blackbox; barometro; tensione & rilevamento corrente
- Porta USB spostata sul retro (SH1.0 4-pin)
- UART3 può essere rilasciato (TX3/RX3) e l'alimentazione RX a bordo può essere interrotta tramite modifiche hardware descritte di seguito
Specifiche
| Peso | 5.58g (senza connettori del motore e cavo di alimentazione); 5.92g (con connettori del motore) |
| Dimensione del foro di montaggio | 26mm x 26mm |
| CPU | STM32F405RGT6 (168MHz) |
| IMU a sei assi (SPI) | ICM42688P / ICM42605 |
| Ricevitore (RX) | Ricevitore ELRS 2.4G seriale |
| Versione firmware RX | BETAFPV AIO 2400 RX ELRS V3.3.0 |
| Antenna | Filo smaltato |
| Memoria Blackbox | 16MB |
| Sensori | Barometro (BMP280 / DSP310); Tensione & Corrente |
| 5V BEC | 5V 3A@8V supply * |
| 9V BEC | 9V 2A@8V supply * |
| Porta USB | SH1.0 4-pin |
| Corrente ESC integrata | 20A continuo; picco 25A |
| Tensione di ingresso ESC | 2-3S |
| Versione firmware FC | Betaflight_4.4.1_BETAFPVF405 |
| Firmware ESC | C_X_70_48_V0.19.2.hex (hardware BB51 Bluejay) |
| Supporto segnale ESC | D-shot300, D-shot600 |
* La corrente di uscita del BEC diminuirà all'aumentare della temperatura.
Collegamenti / Punti salienti del pinout (dai diagrammi della scheda)
- Punti batteria: Batt+ (2-3S), Batt-
- Porta VTX digitale HD (connettore); nota VCC mostrata: 9V (Predefinito) / 5V
- Punti I2C: SCL, SDA
- Punti UART mostrati: T1/R1, T6/R6, TX3/RX3, TX4/RX4; punto SBUS mostrato
- Punti Buzzer: BUZZ+ e BUZZ-; punti LED mostrati
- Marcatura del barometro: BMP280/DSP310
- Marcature relative al ricevitore mostrate: SX1280/SX1281, ESP8285, antenna WiFi, LED RX (Verde), LED FC (Blu)
- Marcature del diagramma inferiore: pulsante BOOT FC/Ricevitore, LED RGB 1 / LED RGB 2, 5V BEC, sensore di corrente onboard
- Punti USB mostrati nel diagramma inferiore: D-, D+, GND, USB 5V
- Marcatura MCU ESC mostrata nel diagramma inferiore: EFM8BB51 (FW C_X_70); “20A MOS” mostrato attorno alle aree ESC; etichette ESC1/ESC2/ESC3/ESC4
Note di configurazione (testo mostrato nel grafico di cablaggio)
- Per VTX digitale HD, UART4 richiede che la Configurazione/MSP sia abilitata.
- Se viene utilizzato un ricevitore esterno, configurare UART1/6 per essere impostato come Serial RX.
- GPS: impostare l'input del sensore come “GPS” in UART1/6, quindi abilitare il GPS nella scheda GPS e selezionare il protocollo corretto per il modulo GPS.
- Protocollo SBUS RX: impostare la modalità ricevitore su “Ricevitore basato su seriale” e impostare il fornitore del ricevitore seriale su “SBUS”.
- Protocollo CRSF RX: impostare la modalità ricevitore su “Ricevitore basato su seriale” e impostare il fornitore del ricevitore seriale su “CRSF”.
- Esempi di VTX digitali HD mostrati: Caddx Vista / Runcam Link VTX, Walksnail VTX, HDZero VTX.
- Esempi di RX protocollo SBUS mostrati: Frsky XM+ / Futaba AC900 / Flysky RX2A Pro.
- Esempi di RX protocollo CRSF mostrati: TBS Nano / ELRS Series RX.
- Nota mostrata: alcune unità VTX digitali HD possono includere un ricevitore SBUS integrato (funziona con il radiocomando DJI). Quando si utilizza un ricevitore esterno, il cablaggio SBUS al VTX digitale potrebbe non essere necessario.
FAQ / Opzioni Hardware
- Interruzione di alimentazione: Rimuovendo il chip bead si disconnette l'alimentazione; per riutilizzare il ricevitore ELRS onboard, salda i pad di saldatura insieme per ripristinare l'alimentazione.
- Rilascio UART3: Rimuovendo due resistori sui pad di saldatura si rilascia UART3 (sinistra: TX3, destra: RX3). Per riconnettere, salda i pad di saldatura insieme quando riutilizzi il ricevitore ELRS onboard.
- Interruttore di tensione (connettore HD VTX): La tensione predefinita per il connettore HD VTX è 9V. Per utilizzare WalkSnail Avatar HD mini 1s e Lite, assicurati che l'alimentazione sia 5V spostando il chip bead dalla posizione 9V alla posizione 5V (o utilizza la saldatura invece del chip bead per passare tra i pad da 5V e 9V).
- Nota sulla scelta del motore: Evita motori sopra 20.000KV.
Firmware / Download
Per domande su costruzione, cablaggio o firmware, contatta https://rcdrone.top/ o [email protected].
- Firmware FC (versione STM32F405): Betaflight_4.4.1_BETAFVF405
- Download del dump CLI del firmware: https://support.betafpv.com/hc/en-us/articles/21884915967513-CLI-for-F4-2-3S-20A-Flight-Controller-ELRS-V1-0-
- Rilascio di Betaflight 4.4.1: https://github.com/betaflight/betaflight/releases/tag/4.4.1
Note sul firmware ESC
- Soluzione ESC BB51 basata su BLHeliSuite16714903 con firmware ESC Bluejay.
- Supporta D-shot bidirezionale e filtraggio RPM in Betaflight.
- Opzioni di frequenza PWM: 24kHz, 48kHz, 96kHz; impostazione predefinita di fabbrica: 48kHz.
- 96kHz non è raccomandato nelle note fornite a causa di possibili problemi di impostazione del minimo del motore.
- Avviso fornito: non aggiornare il firmware con un intervallo più breve, poiché potrebbe causare arresti e danni al controller di volo.
- Configuratore ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Rilasci del firmware Bluejay: https://github.com/bird-sanctuary/bluejay/releases (nota mostrata: scegli C_X_70.HEX)
RX ELRS 2.4G seriale (note di aggiornamento &)
- Utilizza il protocollo CRSF tra ricevitore e controllore di volo.
- Inserisci lo stato di binding accendendo/spegnendo tre volte (collega e scollega il controllore di volo tre volte).
- Indicazione della modalità di binding: LED RX lampeggio rapido doppio; associato: luce fissa.
- Metodi di aggiornamento del ricevitore notati: Wi-Fi o passthrough seriale Betaflight.
- Note di aggiornamento passthrough mostrate: collega il FC al computer, non connetterti a Betaflight Configurator; scegli il target “BETAFPV 2.4GHz AIO RX”; flash utilizzando Betaflight Passthrough in ExpressLRS Configurator.
- Guida al flashing del firmware: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Cosa è incluso
- 1 x F4 2-3S 20A AIO FC V1
- 4 x vite macchina M2*10
- 4 x vite nylon M2*10
- 4 x dadi M2
- 4 x palline ammortizzanti
- 4 x presa angolare JST1.25mm
- 4 x presa dritta JST1.25mm
- 1 x cavo adattatore SH1.0 a 4 pin
- 1 x adattatore Type-C a SH1.0
- 1 x cavo di alimentazione XT30
- 1 x condensatore di filtro
- 1 x cavo connettore VTX a doppia testa da 30mm
- 1 x cavo connettore VTX a testa singola da 60mm
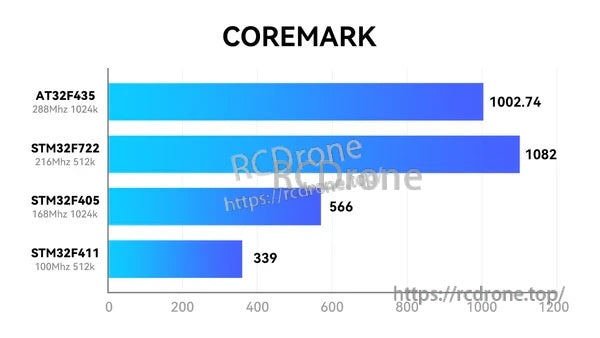
Riferimento (grafico CoreMark mostrato nella grafica del prodotto)
| AT32F435 (288MHz 1024k) | 1002.74 |
| STM32F722 (216MHz 512k) | 1082 |
| STM32F405 (168MHz 1024k) | 566 |
| STM32F411 (100MHz 512k) | 339 |
Dettagli

Una soluzione AIO compatta 2–3S che abbina un controller di volo F4 con un ESC da 20A per costruzioni in stile HD whoop.

La mappa dei pad superiori chiari aiuta a identificare il connettore VTX digitale DJI, pannelli della batteria, UART e connessioni buzzer/LED prima della saldatura.
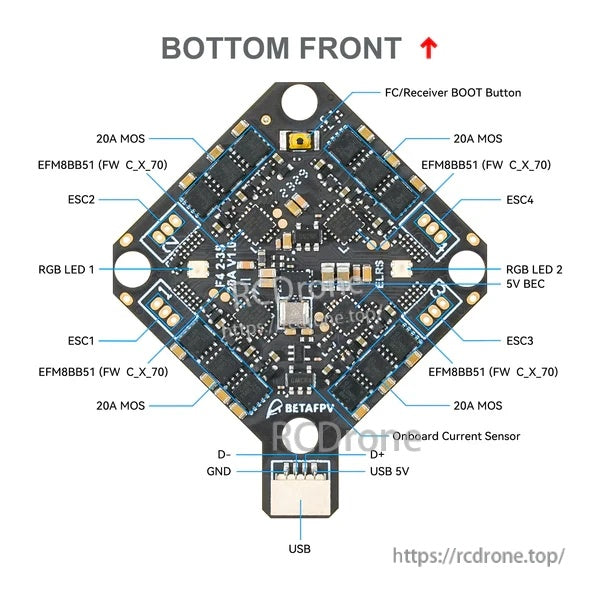
Il layout della parte inferiore evidenzia le sezioni dell'ESC, il pulsante di avvio, i pad LED RGB, il sensore di corrente integrato e i punti di cablaggio USB.
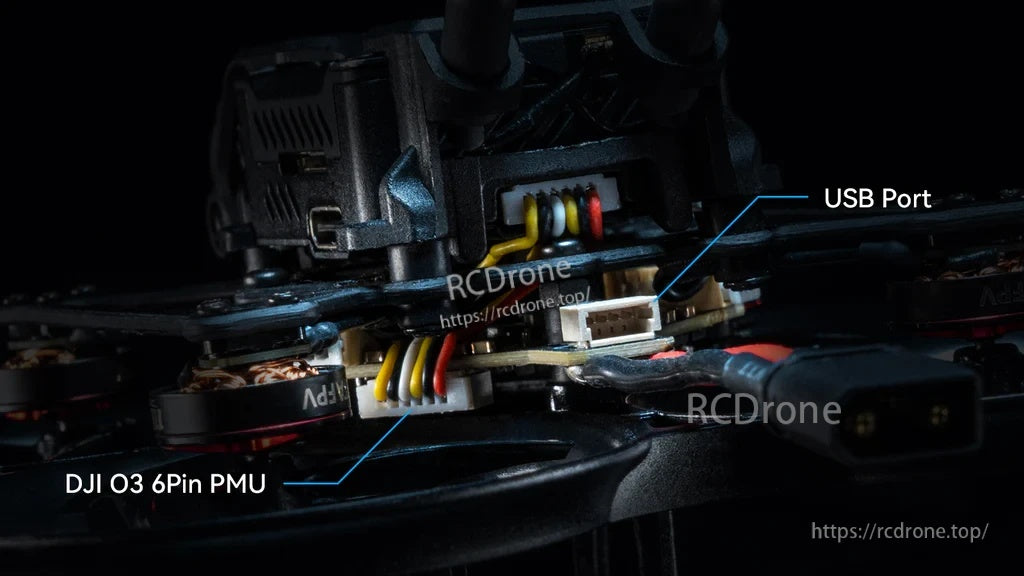
Una porta USB montata sul retro e il connettore PMU DJI O3 mantengono il cablaggio ordinato su telai compatti.


Il connettore VTX HD è impostato su 9V per impostazione predefinita, con un'opzione alternativa a 5V disponibile tramite una piccola modifica di saldatura.

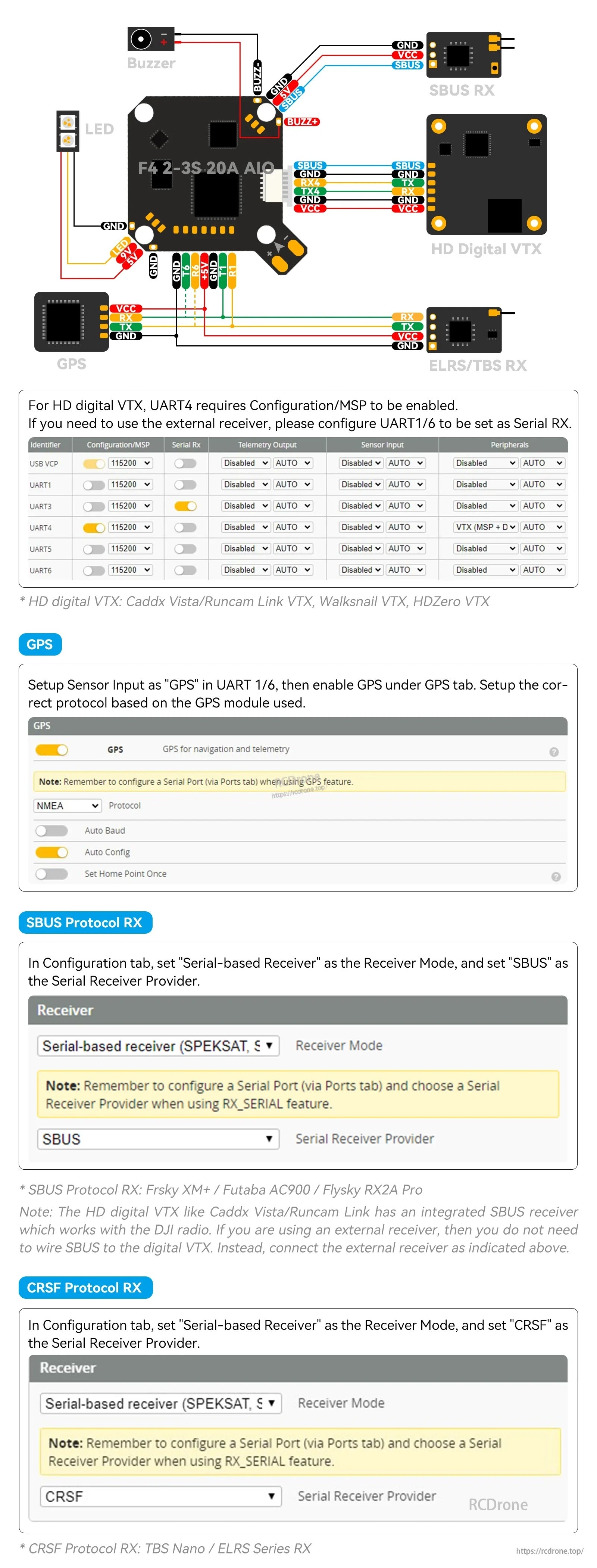
Un esempio di cablaggio e una guida alle impostazioni del ricevitore Betaflight semplificano la configurazione per le costruzioni VTX digitali e la configurazione del ricevitore seriale.

Related Collections


