Kit di sviluppo drone programmabile Raspberry Pi F450-4B - Piattaforme drone industriali open source Pixhawk DIY Ardupilot
Kit di sviluppo drone programmabile Raspberry Pi F450-4B - Piattaforme drone industriali open source Pixhawk DIY Ardupilot
RCDrone
Impossibile caricare la disponibilità di ritiro
Panoramica
IL Modello F450-4B Drone Raspberry Pi è un avanzato Kit drone fai da te che combina un potente Raspberry Pi 4B computer di bordo con il versatile Controllore di volo Pixhawk 2.4.8, rendendolo altamente personalizzabile e drone programmabile piattaforma. Questa Piattaforma per droni open source supporta strumenti all'avanguardia come Kit drone-python, consentendo agli sviluppatori di creare missioni autonome, trasmissione dati in tempo reale e applicazioni di elaborazione delle immagini basate sull'intelligenza artificiale. Con un robusto telaio da 450 mm, una fotocamera HD da 200 MP, una batteria 3S da 5200 mAh per un massimo di 20 minuti di volo e modalità di volo avanzate come mantenimento dell'altitudine, ritorno a casa e modalità cerchio, il kit drone F450 è la scelta ideale per appassionati, ricercatori ed educatori che cercano un'esperienza di sviluppo di droni innovativa.
Caratteristiche principali
Hardware ad alte prestazioni
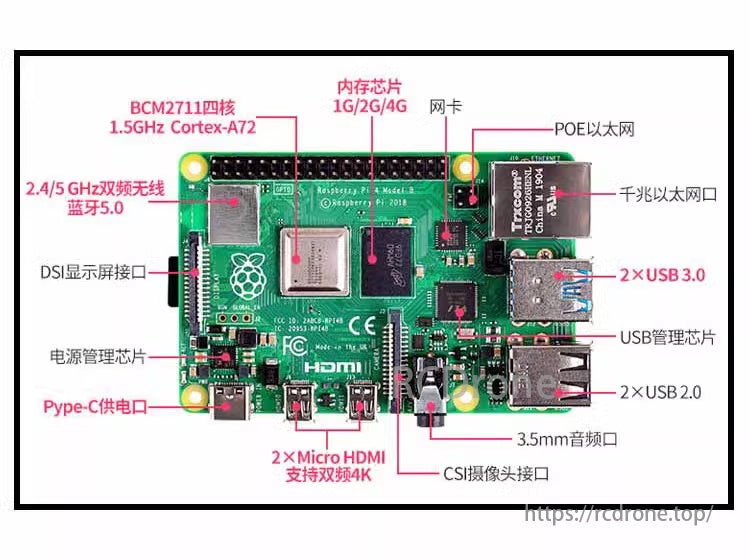
- Raspberry Pi 4B: Dotato di un processore quad-core a 64 bit e 1,5 GHz, supporta l'uscita video 4K e la comunicazione WiFi ad alta velocità per un funzionamento affidabile.
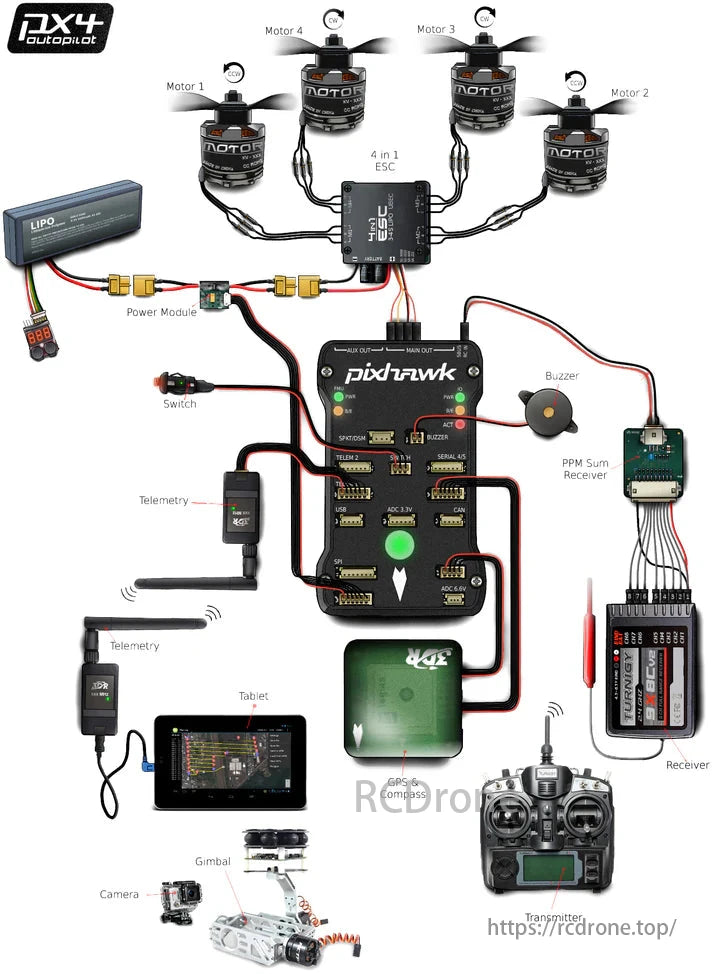
- Controllore di volo Pixhawk 2.4.8: Dotato di molteplici sensori integrati, che garantiscono un controllo preciso dell'assetto, del volo stazionario e della pianificazione della missione.
- Supporto all'espansione della visione: Abbinato a una fotocamera monoculare e agli strumenti OpenCV, questo kit soddisfa le esigenze di trasmissione ed elaborazione delle immagini in tempo reale.
Diverse modalità di volo
- Mantenimento dell'altitudine (AltHold): Mantiene una quota di volo stabile.
- Passare il mouse: Fornisce un hovering stazionario preciso.
- Ritorno a casa (ritorno): Ritorna automaticamente al punto di partenza in caso di perdita del segnale o batteria scarica.
- Atterraggio (Terra): Esegue un atterraggio autonomo e fluido.
- Modalità di stabilizzazione: Regola automaticamente l'assetto del volo.
- Modalità cerchio: Esegue voli circolari attorno a un bersaglio.
- Modalità senza testa: Rimuove i vincoli direzionali per un controllo più semplice.
- Ritorno fuori controllo: Ritorna a una posizione preimpostata quando il segnale viene perso.
- Atterraggio a bassa potenza: Atterra in sicurezza anche in condizioni di batteria scarica.
Trasmissione dati ed elaborazione immagini
- Crea una rete WiFi locale tramite un hotspot integrato senza richiedere router esterni, consentendo la trasmissione di dati e immagini in tempo reale.
- Supporta lo streaming e l'analisi video basati su OpenCV, ideale per il monitoraggio delle immagini e le applicazioni intelligenti.
Specifiche
Parametri del drone
| Parametro | Dettagli |
|---|---|
| Nome | Kit drone F450 |
| Passo | 450mm |
| Peso | 1493g (con batteria e Raspberry Pi 4B) |
| Controllore di volo | Versione 2.4.8 controllori di volo open source |
| Computer di bordo | Raspberry Pi 4B |
| Telecamera | 200MP HD 1080P |
| Supporto in hovering | Modulo di flusso ottico e sensore di distanza laser |
| Modulo GPS | m8n GPS |
| Tempo di volo | ~20 minuti (a seconda dell'ambiente e della missione) |
| Batteria | 3S 5200mAh (11,1V) |
| Capacità di carico utile | 500g |
| Resistenza al vento | Livello 3-4 |
| Motore | Soleggiato Sky A2212 |
| ESC | Hobbywing 20A ESC (supporta batterie LiPo 3S-4S) |
| Eliche | Eliche autobloccanti T1045 |
| Altitudine massima | 2000 m (senza interferenze) |
| Autonomia di volo | 1000 metri |
| Scenari di volo | Interno / Esterno |
Specifiche del controller di volo Pixhawk 2.4.8
- Processore: ARM STM32F427 Cortex M4 a 32 bit, 168 MHz, 256 KB di RAM
- Sensori:
- Giroscopio a 3 assi 6DOF L3GD20
- Accelerometro/magnetometro a 3 assi e 14 bit LSM303D
- Accelerometro/magnetometro a 6 assi MPU6000
- Barometro ad alta precisione MS5611
- Compatibilità con il controllo a terra: QGroundControl, pianificatore di missioni
- Dimensioni: 81mm x 47mm x 16mm; Peso: 37g
Specifiche Raspberry Pi 4B
- Chipset: Modello Broadcom BCM2711
- processore: 64 bit 1.5GHz quad-core
- Scheda grafica: VideoCore VI da 500 MHz
- Memoria RAM: 4 GB DDR4
- Interfacce: 2 porte USB 3.0, 2 porte USB 2.0
- Uscita video: Due porte micro HDMI, supporta 4K@60Hz
- Comunicazione: Bluetooth 5.0, WiFi 5 (2,4/5 GHz)
- Alimentazione elettrica: USB Tipo-C (5V 3A)
Il pacchetto include
Configurazione 1: motore SunnySky A2212 con telecomando FlySky i6 e telemetria
- Telaio F450 con carrello di atterraggio
- Motori SunnySky A2212 (4 pezzi)
- Hobbywing 20A ESC (4 pezzi)
- Eliche autobloccanti T1045 (4 coppie)
- Modulo GPS PIX M8n
- Piastra antivibrante
- Telecomando FlySky i6
- Batteria 3S 5200mAh
- Caricabatterie bilanciato B3
- Supporto GPS
- Modulo di telemetria della tensione FS

Incluso: Cinghie per batteria, fascette in nylon, cuscinetti in legno, nastro adesivo 3M, cicalino, strumenti di installazione
Video di assemblaggio e debug, materiali correlati forniti; contattare il servizio clienti per il codice sorgente.
Configurazione 2: Motore SunnySky A2212 con Radiolink PRO
- Telaio F450 con carrello di atterraggio
- Motori SunnySky A2212 (4 pezzi)
- Hobbywing 20A ESC (4 pezzi)
- 9450 eliche autobloccanti (3 coppie)
- FOTO.Kit modulo GPS M8n
- Piastra antivibrante
- Radiolink PRO (ricevitore R9DS)
- Batteria di controllo 3S 2200mAh
- Batteria 3S 5200mAh
- Caricabatterie bilanciato B3
- Supporto GPS

Incluso: Cinghie per batteria, fascette in nylon, cuscinetti in legno, nastro adesivo 3M, cicalino, strumenti di installazione
Video di assemblaggio e debug, materiali correlati forniti; contattare il servizio clienti per il codice sorgente.
Kit di montaggio drone F450
Scenari applicativi
Il kit di sviluppo per droni F450-4B è ideale per:
- Ricerca e sviluppo sui droni: Ricerca universitaria, test del controllore di volo, sviluppo di algoritmi.
- Applicazioni intelligenti: Pianificazione del percorso, riconoscimento dell'obiettivo ed evitamento degli ostacoli.
- Esperimenti educativi: Programmazione, assemblaggio hardware e debug.
- Utilizzo sul campo: Hovering indoor, rilievi outdoor, monitoraggio agricolo e molto altro.
Dettagli
Piattaforma di sviluppo per droni Raspberry Pi F450-4B
L'F450 è un modello di drone classico e comunemente utilizzato, che offre un assemblaggio semplice e pratico, un rapporto qualità-prezzo elevato, grande praticità ed è adatto ai principianti che desiderano iniziare rapidamente a usare i droni.

Raspberry Pi 4B aggiornato
La potenza di elaborazione hardware del Raspberry Pi 4B è notevolmente superiore a quella del 3B+.
Il Raspberry Pi è dotato del più recente sistema open source Versione 20.04 di Ubuntu, offrendo un'esperienza più fluida rispetto al sistema Ubuntu Mate.

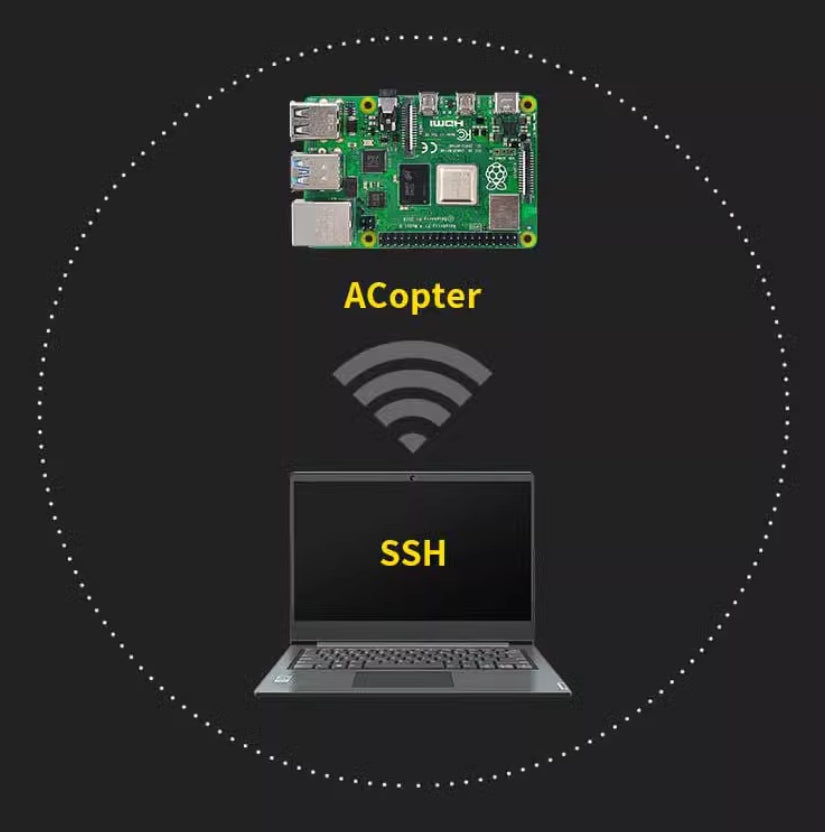
Hotspot WiFi abilitato dal sistema (elicottero)
Utilizzando la capacità WiFi del Raspberry Pi 4B, viene creato un hotspot autocostruito (Acopter). Il PC può connettersi direttamente all'hotspot WiFi del 4B per formare una rete locale e utilizzare i comandi SSH per l'accesso remoto al Raspberry Pi. A differenza del modello 3B+ che richiede un router per la configurazione di rete, questa configurazione è molto più semplice e intuitiva per i principianti.
Elaborazione visiva OpenCV
Viene aggiunta una telecamera monoculare, che consente la trasmissione delle immagini e la post-elaborazione. I flussi video possono essere catturati tramite Raspberry Pi ed elaborati utilizzando strumenti come OpenCV. I flussi video HD in tempo reale possono anche essere ritrasmessi a un PC per l'elaborazione o a un dispositivo mobile per la visualizzazione.

Interfaccia di espansione più ampia
Raspberry Pi 4B offre un'ampia gamma di interfacce di espansione, tra cui due porte USB 3.0, due porte micro HDMI 4K, interfacce CSI e DSI, Gigabit Ethernet e un alimentatore Type-C, garantendo un'eccezionale versatilità per varie applicazioni.
Edizione con una sola telecamera
L'edizione con telecamera singola include un Raspberry Pi 4B e una telecamera monoculare, consentendo la comunicazione tramite una porta seriale con il flight controller. Supporta attività come elaborazione visiva, programmazione Python e comunicazione. Questa versione è adatta per utenti con esperienza pregressa nell'uso di Pixhawk, conoscenze di base di Ubuntu (Linux), OpenCV, Raspberry Pi e comunicazione in rete locale.
Oltre alle funzionalità di base, l'edizione con telecamera singola supporta la trasmissione di immagini e dati tramite WiFi e consente il controllo del drone tramite Kit drone-python programmazione.

Posizionamento del flusso ottico
Controllo del volo stazionario indoor con Dronekit-python in condizioni di posizionamento del flusso ottico

Questa piattaforma di sviluppo dei droni supporta ROS, Programmazione Python, Riconoscimento delle immagini OpenCV, Trasmissione a lunga distanza 4G, E Atterraggio guidato visivo del codice 2D Aruco, rendendolo altamente versatile e innovativo.

Telecomando FlySky i6
Dotato di un ricevitore ia6b precaricato con firmware a 10 canali, modulo di telemetria della tensione e una portata del telecomando di oltre 1000 m, ideale per i principianti che vogliono imparare e fare pratica.

Telecomando Radiolink AT9S
Dispone di 10 canali con un raggio di controllo di oltre 2000 m. Dotato di un modulo di telemetria che fornisce dati su tensione della batteria, conteggio dei satelliti GPS, altitudine di volo, coordinate, modalità di volo e altro ancora.

Domande frequenti
1. Posso svolgere uno sviluppo secondario? Posso programmare in modo indipendente?
La risposta è sì. Come già introdotto, Ardupilot è attualmente il sistema di controllo di volo open source più utilizzato e molti eccellenti modelli di droni nazionali e internazionali sono sviluppati sulla base di questo sistema.
Lo sviluppo secondario si sviluppa principalmente in due direzioni: sviluppo del controllo di volo ed espansione esterna.
- Sviluppo del controllo del volo
Utilizziamo Ardupilot, quindi imparare a sviluppare sistemi di controllo di volo open source implica principalmente lo studio del progetto open source Ardupilot.
- Sono richieste solide competenze di programmazione (il codice sorgente è in C++), insieme alla conoscenza della matematica avanzata (matematica discreta, iterazione, linearizzazione), del filtraggio di Kalman e dello sviluppo embedded.
- Sono necessarie solide basi teoriche. Ciò ti prepara a lavorare sullo sviluppo di sistemi senza pilota e sulla R&S del controllo di volo.
Se vuoi concentrarti sullo sviluppo del controllo di volo, la maggior parte del lavoro deve essere eseguita sul tuo computer:
- Impostazione dell'ambiente di programmazione, download del codice sorgente del controllo di volo, studio della sua architettura e dei moduli funzionali, ecc.
- Una volta acquisita familiarità con il framework del codice, è possibile iniziare a programmare partendo dal codice esistente.
Inizia con un modello di controllo di volo di base e fai riferimento al manuale di controllo di volo Ardupilot che forniamo per indicazioni.
- Sviluppo espansione esterna
L'espansione esterna consente di aggiungere dispositivi esterni in base alle proprie attività e scenari tramite le interfacce riservate del flight controller. Ad esempio:
- Aggiungere un modulo di flusso ottico per il posizionamento e il volo stazionario in ambienti interni.
- Aggiungere un radar laser per evitare gli ostacoli.
- Utilizzare la telemetria per abilitare la pianificazione autonoma del volo e del percorso.
- Installa un computer di bordo (ad esempio Raspberry Pi) e usa Dronekit-Python o ROS per programmare il controllo del drone.
L'obiettivo dell'aggiunta di un computer di bordo è quello di gestire attività più complesse, come:
- Utilizzo della fotocamera Raspberry Pi per il riconoscimento visivo (richiede OpenCV, YOLO, ecc.).
- Combinazione di protocolli di comunicazione per controllare il volo del drone.
- Trasmissione di dati di volo o video ad alta definizione tramite reti.
Queste funzioni non possono essere svolte esclusivamente affidandosi al controllore di volo.
Lo studio dell'espansione esterna si concentra principalmente sulle applicazioni, che è anche la direzione intrapresa dalla maggior parte dei concorsi a livello nazionale.Dopo aver appreso, potrai esplorare aree critiche dei droni intelligenti, come il riconoscimento visivo, l'integrazione dell'intelligenza artificiale con i droni e molto altro ancora.
2. Quali sono i prerequisiti per lo sviluppo indipendente?
Imparare a conoscere i droni è un processo graduale. I sistemi di droni sono interdisciplinari e integrativi, coinvolgendo un'ampia gamma di aree di conoscenza. Per imparare lo sviluppo dei droni, sono richieste le seguenti basi:
- Competenze pratiche di base, tra cui la capacità di utilizzare saldatori, vari cacciaviti e altri utensili.
- Conoscenze di base dell'elettronica: concetti quali tensione, corrente, potenza, polarità e segnali.
- Conoscenze fondamentali del controllo dell'automazione: controllo PID, feedback, segnali digitali, segnali analogici, ecc.
- Competenze informatiche di base: driver, porte seriali, velocità in baud, versioni del firmware, versioni del software.
- Conoscenza di base dei droni Pixhawk.
- Conoscenza di base del sistema operativo Ubuntu.
- Conoscenza dei linguaggi di programmazione: ad esempio C++ e Python.
Come realizzare il drone Respberry PI?
Related Collections