






I nostri prodotti hanno superato la certificazione CE e ROHS e la maggior parte di essi ha richiesto brevetti sull'aspetto e modelli di utilità
Footech SCS225-C006 - 7,4 V 19 kg 180° 0,192 sec/60° 25 T Controllo seriale BUS Servo Robot Arduin Doppio asse Shafe robot roborock iRobot Roomba robot aspirapolvere Servo
Footech SCS225-C006 - 7,4 V 19 kg 180° 0,192 sec/60° 25 T Controllo seriale BUS Servo Robot Arduin Doppio asse Shafe robot roborock iRobot Roomba robot aspirapolvere Servo
Feetech
Prezzo di listino
$21.25 USD
Prezzo di listino
Prezzo scontato
$21.25 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
SPECIFICHE
Nome del marchio: Feetech
Origine: Cina continentale
Materiale: Plastica
Tipo di plastica: PC
Parti e accessori RC: Batterie - LiPo
Dimensione: 10*10*10
Per tipo di veicolo: Automobili
Usa: Veicoli e giocattoli telecomandati
Parti/accessori di aggiornamento: Batteria al litio
Periferiche/dispositivi di controllo remoto: Controller remoto
Forniture utensili: Batteria
Quantità: 1 pezzo
Parametri tecnici: KV1100
Numero modello: SCS225-C006
Attributi trazione integrale: Motori
Interasse: Viti
Numero modello: SCS225-C006
Dimensione: 45,23 mm X 24,73 mm X 35 mm
Peso: 55± 1g
Tipo di ingranaggio: Rame
Angolo limite: NESSUN limite
Cuscinetto: Cuscinetti a sfere
Scanalatura ingranaggio clacson: 25T
Motore: Motore senza nucleo
Gamma di tensione operativa: 6-7,4 V
Coppia di stallo di picco: 19,5 kg.cm@6V
Coppia nominale: 6,5 kg.cm@6V
Tipo di protocollo: Comunicazione seriale asincrona half duplex
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Specializzati in ODM e OEM e su misura 1. Etichetta o stampa del logo
2. Cavo servo
3. Imballaggio: sacchetto in PE, scatola colorata, scatola di plastica
il tuo logo
4.Connettore cavo
5.Vari personalizzati di servoamplificatori con ampia tensione di lavoro
2. Cavo servo
3. Imballaggio: sacchetto in PE, scatola colorata, scatola di plastica
il tuo logo
4.Connettore cavo
5.Vari personalizzati di servoamplificatori con ampia tensione di lavoro
Utilizzo del prodotto

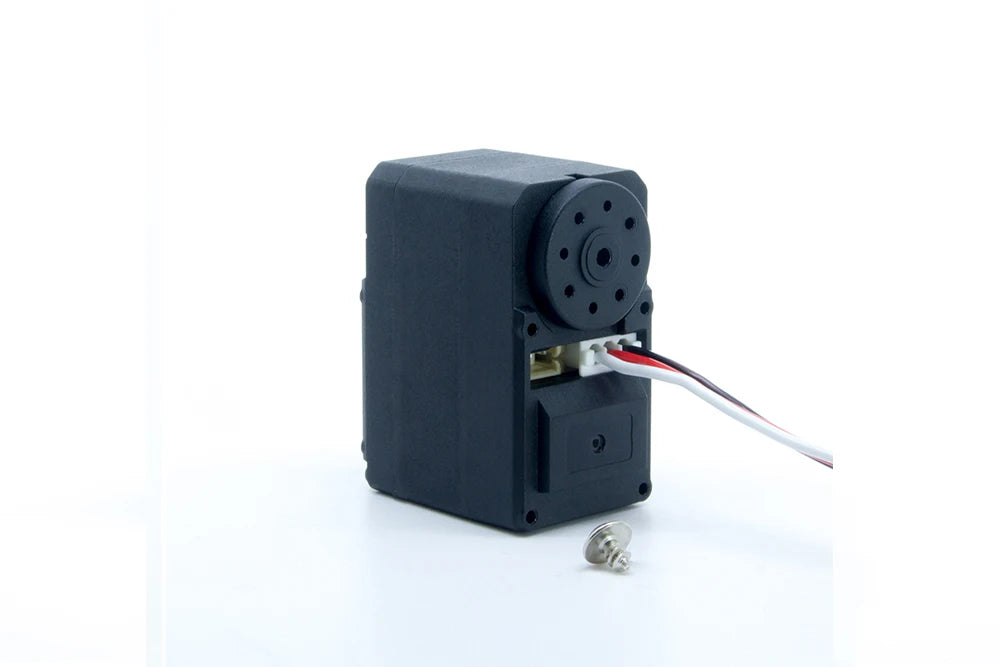
FEETECH 7.4V 20KG.CM Custodia in plastica Encoder magnetico con ingranaggio metallico Doppio albero Servo bus seriale TTL
Immagini dettagli

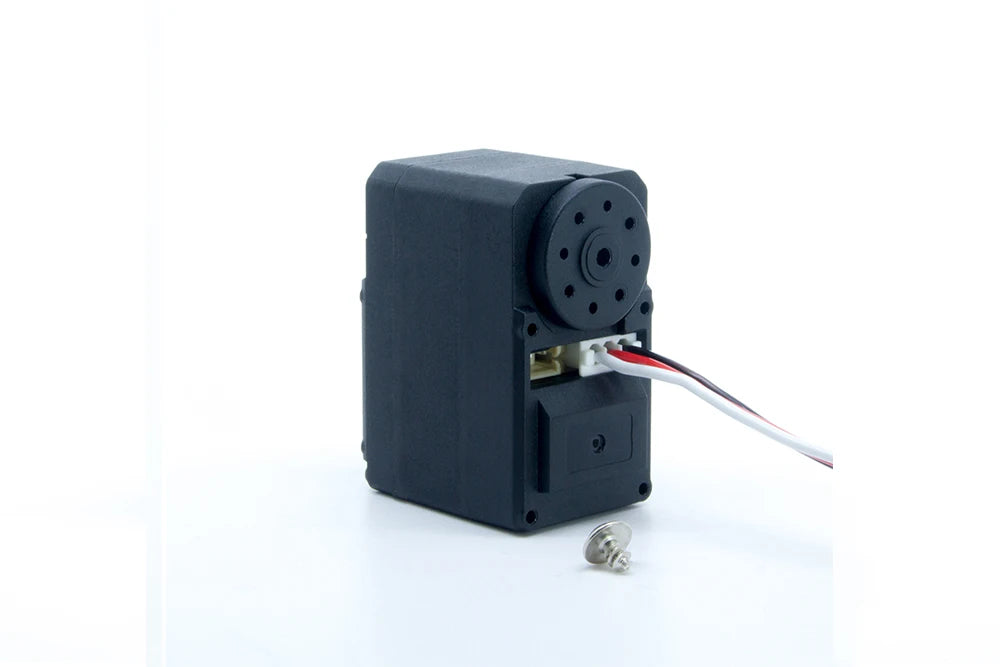



Immagini dettagli
FEETECH 7.4V 20KG.CM Custodia in plastica Encoder magnetico con ingranaggio metallico Doppio albero Servo bus seriale TTL
Funzione di controllo elettronico:
1.Funzione di avvio e arresto dell'accelerazione: è possibile impostare il valore di velocità e accelerazione, l'effetto del movimento è più delicato.
2.Alta precisione, 360 gradi posizione assoluta precisione 4096 bit, la risoluzione di posizione massima è 0,088 gradi, se il controllo è 90 gradi, input 4096/360 * 90 = 1024, se il controllo è 180 gradi, input 4096/360 * 180 = 2048, in modo da calcolare .
3.Sono disponibili quattro modalità di funzionamento (servo posizione modalità 0, modalità 1 velocità ad anello chiuso, modalità 2 velocità ad anello aperto, modalità 3 servo passo).
1)、 Modalità 0: modalità Posizione, la modalità predefinita. In questa modalità è possibile realizzare il controllo dell'angolo assoluto a 360 gradi. Supporta il movimento in accelerazione.
2)、Modalità 1: Velocità ad anello chiuso, nell'interfaccia di programmazione, la modalità operativa è impostata su 1, passare alla modalità velocità ad anello chiuso e inserire la velocità corrispondente nella colonna della velocità per eseguire .
3)、Modalità 2: Velocità ad anello aperto, nell'interfaccia di programmazione, la modalità operativa è impostata su 2, passare alla modalità velocità ad anello aperto e inserire l'ora corrispondente nella colonna dell'ora per l'esecuzione.
4)、Modalità 3: Modalità passo: nell'interfaccia di programmazione, il limite dell'angolo massimo/minimo è impostato su 0 e la modalità operativa è impostata su 3. Passa alla modalità passo. Immettere la posizione nella barra di posizione per avanzare verso la posizione target. Fare nuovamente clic sulla posizione per continuare a procedere nella stessa direzione.
4、Modalità multigiro, controllo assoluto a 360 gradi e feedback, con la massima precisione, il controllo della posizione assoluta può essere di più o meno 7 giri, ma il numero di cicli di accensione e spegnimento non viene salvato, viene mantenuto solo il valore assoluto del feedback della posizione.
5、Calibrazione di un tasto, installazione con angolo di 360 gradi in qualsiasi posizione, (40 (decimale) ingresso indirizzo 128 (decimale)) la posizione corrente di correzione di un tasto è al centro (2048 (decimale)).
6、Livello di comunicazione TTL, comunicazione asincrona half duplex, supporto del protocollo bus per regolare i parametri di lettura e scrittura e aggiunta della funzione di lettura sincrona (inviare un'istruzione per ricevere a turno l'istruzione di rilettura da ciascun servo sul bus.)
7、Protezioni multiple, (sovraccarico, sovracorrente, sovratensione, surriscaldamento, impostazione interruttore, modifica parametri condizione)
1)、Protezione da sovraccarico: tramite rilevamento della posizione, durante il movimento dalla posizione iniziale a la posizione target, quando viene rilevata la posizione corrente come diversa dalla posizione target dopo aver incontrato il blocco degli ostacoli, la forza di scarico dura 2S (20% della forza di blocco predefinita). Fino all'attivazione di un nuovo comando, Rilascia protezione
2)、Protezione da sovracorrente: tramite il valore di corrente impostato, verificare se la corrente raggiunge il valore di corrente impostato. Quando raggiunge il valore di corrente impostato, rilasciare la forza (la coppia predefinita è 0). Fino all'attivazione di un nuovo comando, protezione di rilascio
3)、Protezione da sovratensione: rileva il valore della tensione corrente. Se supera il valore di tensione impostato, l'allarme visualizzerà sovratensione.
4)、Protezione da surriscaldamento: rileva la temperatura attuale del motore. Se la temperatura supera il valore impostato, verrà visualizzato l'allarme surriscaldamento.
8:Feedback multiplo:
1)Feedback del carico: l'uscita di controllo della corrente guida il ciclo di lavoro della tensione del motore e il fondo scala è 1000 = 100% di uscita della coppia.
2) Feedback corrente: la corrente di lavoro del servo, 1 = 6,5 mA
3) Feedback tensione: la tensione di lavoro del servo, 70=7 V, 0,1 V
4) Feedback temperatura: temperatura di funzionamento interna del servo corrente (temperatura di misurazione)。
5) Feedback velocità: feedback sulla velocità di rotazione corrente del motore e sul numero di passi nell'unità di tempo (al secondo)
9、Aprire i parametri PID.
1.Funzione di avvio e arresto dell'accelerazione: è possibile impostare il valore di velocità e accelerazione, l'effetto del movimento è più delicato.
2.Alta precisione, 360 gradi posizione assoluta precisione 4096 bit, la risoluzione di posizione massima è 0,088 gradi, se il controllo è 90 gradi, input 4096/360 * 90 = 1024, se il controllo è 180 gradi, input 4096/360 * 180 = 2048, in modo da calcolare .
3.Sono disponibili quattro modalità di funzionamento (servo posizione modalità 0, modalità 1 velocità ad anello chiuso, modalità 2 velocità ad anello aperto, modalità 3 servo passo).
1)、 Modalità 0: modalità Posizione, la modalità predefinita. In questa modalità è possibile realizzare il controllo dell'angolo assoluto a 360 gradi. Supporta il movimento in accelerazione.
2)、Modalità 1: Velocità ad anello chiuso, nell'interfaccia di programmazione, la modalità operativa è impostata su 1, passare alla modalità velocità ad anello chiuso e inserire la velocità corrispondente nella colonna della velocità per eseguire .
3)、Modalità 2: Velocità ad anello aperto, nell'interfaccia di programmazione, la modalità operativa è impostata su 2, passare alla modalità velocità ad anello aperto e inserire l'ora corrispondente nella colonna dell'ora per l'esecuzione.
4)、Modalità 3: Modalità passo: nell'interfaccia di programmazione, il limite dell'angolo massimo/minimo è impostato su 0 e la modalità operativa è impostata su 3. Passa alla modalità passo. Immettere la posizione nella barra di posizione per avanzare verso la posizione target. Fare nuovamente clic sulla posizione per continuare a procedere nella stessa direzione.
4、Modalità multigiro, controllo assoluto a 360 gradi e feedback, con la massima precisione, il controllo della posizione assoluta può essere di più o meno 7 giri, ma il numero di cicli di accensione e spegnimento non viene salvato, viene mantenuto solo il valore assoluto del feedback della posizione.
5、Calibrazione di un tasto, installazione con angolo di 360 gradi in qualsiasi posizione, (40 (decimale) ingresso indirizzo 128 (decimale)) la posizione corrente di correzione di un tasto è al centro (2048 (decimale)).
6、Livello di comunicazione TTL, comunicazione asincrona half duplex, supporto del protocollo bus per regolare i parametri di lettura e scrittura e aggiunta della funzione di lettura sincrona (inviare un'istruzione per ricevere a turno l'istruzione di rilettura da ciascun servo sul bus.)
7、Protezioni multiple, (sovraccarico, sovracorrente, sovratensione, surriscaldamento, impostazione interruttore, modifica parametri condizione)
1)、Protezione da sovraccarico: tramite rilevamento della posizione, durante il movimento dalla posizione iniziale a la posizione target, quando viene rilevata la posizione corrente come diversa dalla posizione target dopo aver incontrato il blocco degli ostacoli, la forza di scarico dura 2S (20% della forza di blocco predefinita). Fino all'attivazione di un nuovo comando, Rilascia protezione
2)、Protezione da sovracorrente: tramite il valore di corrente impostato, verificare se la corrente raggiunge il valore di corrente impostato. Quando raggiunge il valore di corrente impostato, rilasciare la forza (la coppia predefinita è 0). Fino all'attivazione di un nuovo comando, protezione di rilascio
3)、Protezione da sovratensione: rileva il valore della tensione corrente. Se supera il valore di tensione impostato, l'allarme visualizzerà sovratensione.
4)、Protezione da surriscaldamento: rileva la temperatura attuale del motore. Se la temperatura supera il valore impostato, verrà visualizzato l'allarme surriscaldamento.
8:Feedback multiplo:
1)Feedback del carico: l'uscita di controllo della corrente guida il ciclo di lavoro della tensione del motore e il fondo scala è 1000 = 100% di uscita della coppia.
2) Feedback corrente: la corrente di lavoro del servo, 1 = 6,5 mA
3) Feedback tensione: la tensione di lavoro del servo, 70=7 V, 0,1 V
4) Feedback temperatura: temperatura di funzionamento interna del servo corrente (temperatura di misurazione)。
5) Feedback velocità: feedback sulla velocità di rotazione corrente del motore e sul numero di passi nell'unità di tempo (al secondo)
9、Aprire i parametri PID.
Related Collections






