


MOTORE AD ALTA COPPIA HTDW-5047 Modulo Motore Alta Coppia 50mm 12-48V Encoder 14-bit Rapporto 9/20/36
MOTORE AD ALTA COPPIA HTDW-5047 Modulo Motore Alta Coppia 50mm 12-48V Encoder 14-bit Rapporto 9/20/36
HIGH TORQUE
Impossibile caricare la disponibilità di ritiro
Panoramica
Il MOTORE AD ALTO MOMENTO HTDW-5047 è una serie di moduli motore compatti ad alto momento offerti in tre rapporti di riduzione (9 / 20 / 36). Presenta una risoluzione dell'encoder di ingresso/uscita a 14 bit, un intervallo di tensione di 12-48V e una frequenza di controllo di 3kHz per il controllo del movimento e le articolazioni della robotica.
Caratteristiche principali
- Modelli: HTDW-5047-9-NE / HTDW-5047-20-NE / HTDW-5047-36-NE
- Gioco ridotto: <10 Arcmin
- Precisione di riposizionamento: <12 Arcmin; precisione di posizionamento assoluto: <15 Arcmin
- Risoluzione dell'encoder: 14-bit (ingresso) e 14-bit (uscita)
- Velocità di trasmissione: 5 Mbps; tempo di risposta: ≤200 us
Specifiche
| Parametro | HTDW-5047-9-NE | HTDW-5047-20-NE | HTDW-5047-36-NE |
|---|---|---|---|
| Lunghezza e larghezza | 50mm | 50mm | 50mm |
| Altezza | 47.4mm | 47.4mm | 47mm |
| Peso | 300g | 322g | 321g |
| Gioco | <10 Arcmin | <10 Arcmin | <10 Arcmin |
| Precisione di ripetizione della posizione | <12 Arcmin | <12 Arcmin | <12 Arcmin |
| Precisione assoluta della posizione | <15 Arcmin | <15 Arcmin | <15 Arcmin |
| Costante di coppia | 0.062 Nm/A | 0.062 Nm/A | 0.062 Nm/A |
| Numero di coppie di poli | 14 | 14 | 14 |
| Rapporto di riduzione | 9 | 20 | 36 |
| Coppia di bloccaggio | 6 Nm | 12 Nm | 21 Nm |
| RPM a vuoto | 260 RPM | 130 RPM | 60 RPM |
| Coppia nominale | 1 Nm | 2 Nm | 4 Nm |
| RPM nominali | 170 RPM | 110 RPM | 40 RPM |
| Valutazione | 18 W | 23 W | 17 W |
| Intervallo di tensione | 12-48V | 12-48V | 12-48V |
| Corrente di picco | 10 A | 10 A | 10 A |
| Precisione del controllo della velocità | ±8% | ±15% | ±15% |
| Risoluzione dell'encoder di input | 14-bit | 14-bit | 14-bit |
| Velocità di trasmissione | 5 Mbps | 5 Mbps | 5 Mbps |
| Corrente nominale | 2 A | 2 A | 2 A |
| Precisione di controllo | ±10% | ±15% | ±15% |
| Tempo di risposta | ≤200 us | ≤200 us | ≤200 us |
| Risoluzione dell'encoder di output | 14-bit | 14-bit | 14-bit |
| Frequenza di controllo | 3 kHz | 3 kHz | 3 kHz |
Per assistenza nella selezione e supporto post-vendita, contattare [email protected] or visita https://rcdrone.top/.
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Manuali
- HTDW-5047-9-NE MANUALE D'USO Assistente di Debugging Motore HIGH TORQUE (PDF)
- HTDW-5047-20-NE MANUALE D'USO Assistente di Debugging Motore HIGH TORQUE (PDF)
- HTDW-5047-36-NE MANUALE D'USO Assistente di Debugging Motore HIGH TORQUE (PDF)
- HTDW-5047-9-NE Manuale di Debugging (PDF)
- HTDW-5047-20-NE Manuale di Debugging (PDF)
- HTDW-5047-36-NE Manuale di Debugging (PDF)
- HTDW-5047-9-NE Analisi Protocollo 1.2 fdcan (PDF)
- HTDW-5047-20-NE Analisi Protocollo 1.2 fdcan (PDF)
- HTDW-5047-36-NE 1.2 fdcan Analisi del Protocollo (PDF)
- Modello 3D del Motore HTDW-5047-9-NE (STP, ZIP)
- Modello 3D del Motore HTDW-5047-20-NE (STP, ZIP)
- Modello 3D del Motore HTDW-5047-36-NE (STP, ZIP)
- Manuale Utente HTDW-5047 (PDF)
Dettagli

La serie HTDW-5047 combina un fattore di forma compatto di 50 mm con alta coppia per giunti robotici e controllo del movimento.
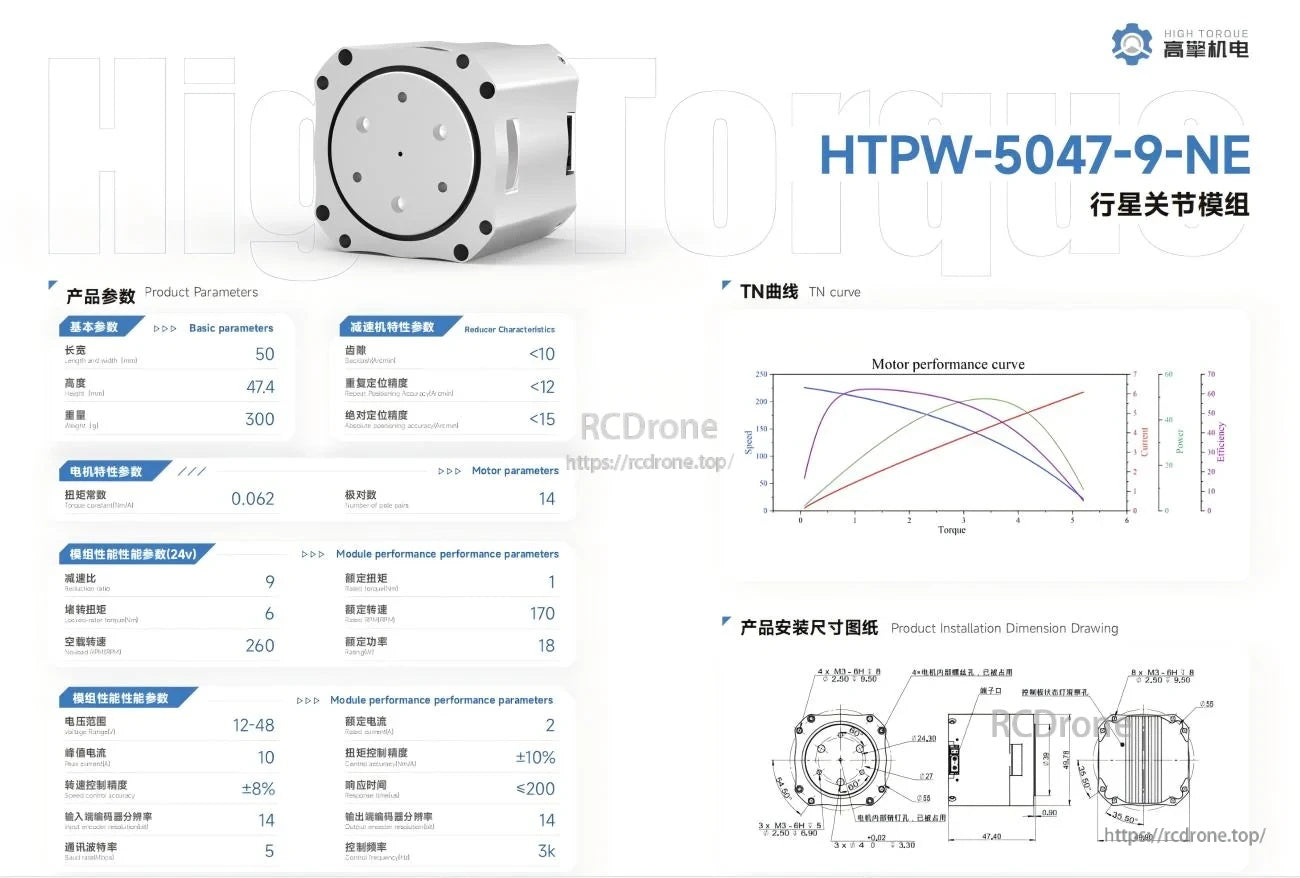
Scegli la versione con riduzione 9:1 quando la maggiore velocità è prioritaria mantenendo la stessa impronta del modulo.
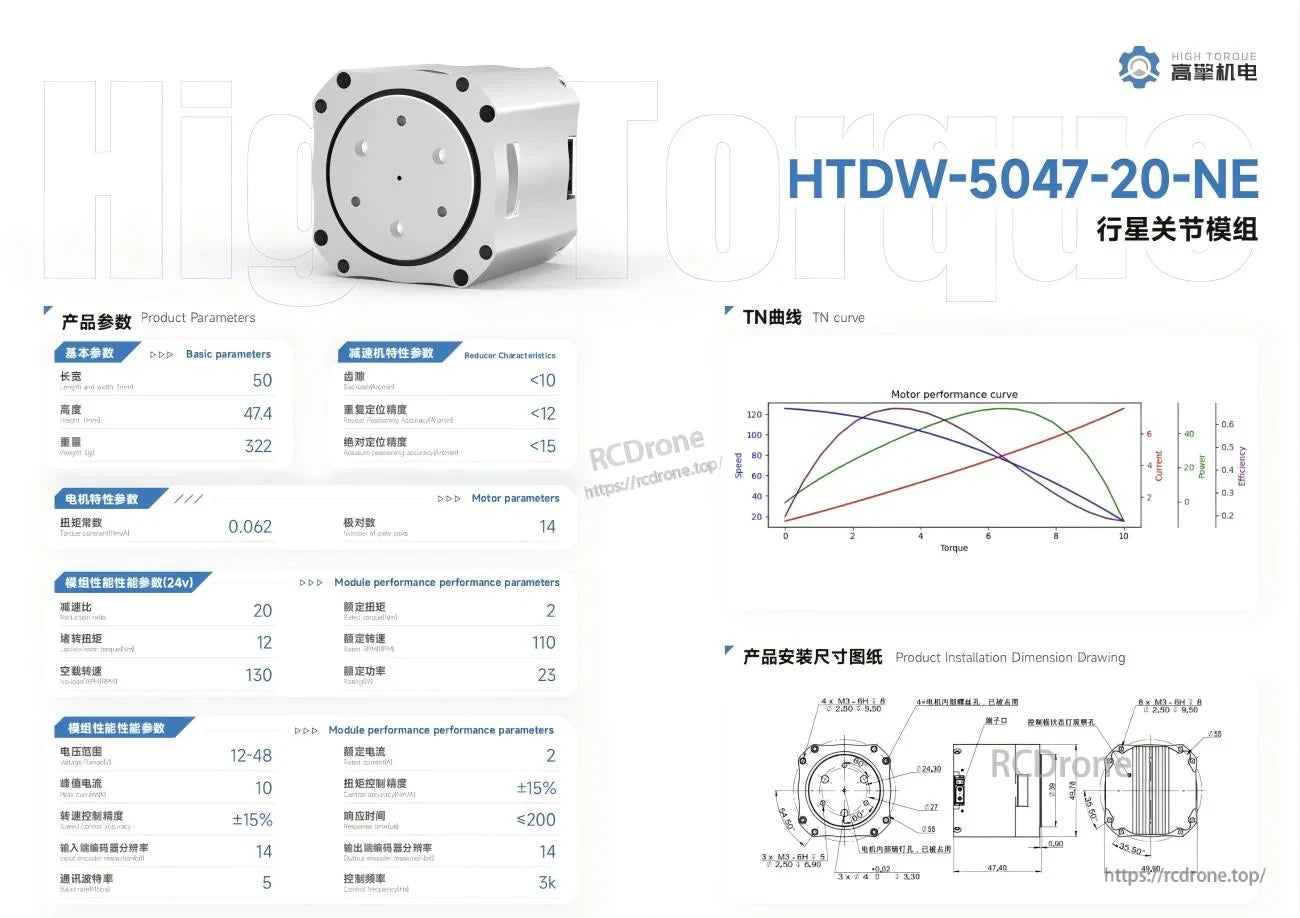
L'opzione di riduzione 20:1 bilancia velocità e coppia per giunti e attuatori robotici di uso generale.
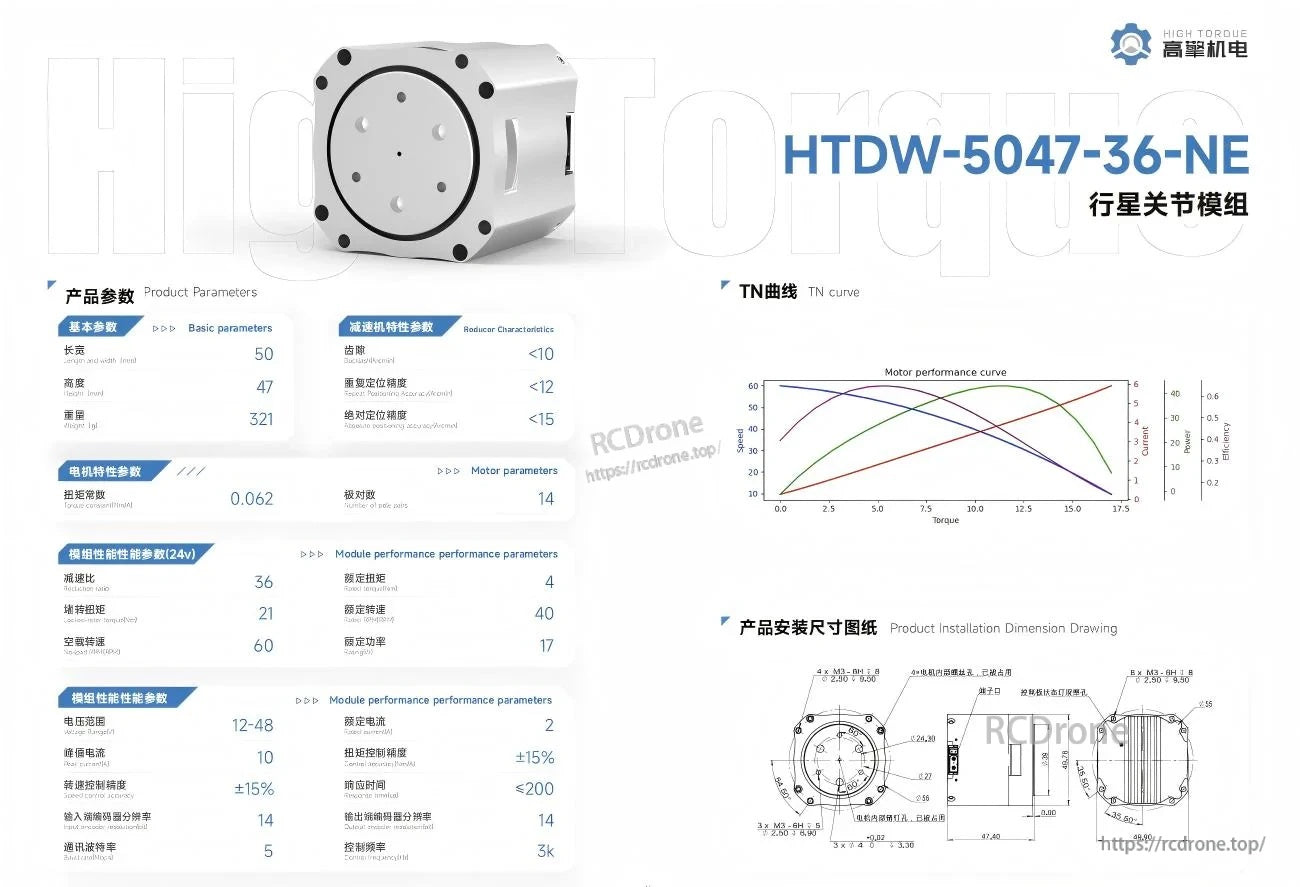
La variante di riduzione 36:1 è adatta per giunti a bassa velocità e alta coppia dove il posizionamento preciso è critico.
Related Collections


