

Motore HIGH TORQUE HTDW-6056-36-NE-JC (Versione a Rulli Incrociati), Rapporto 36, Coppia Nominale 10Nm, 12-48V
Motore HIGH TORQUE HTDW-6056-36-NE-JC (Versione a Rulli Incrociati), Rapporto 36, Coppia Nominale 10Nm, 12-48V
HIGH TORQUE
Prezzo di listino
$362.00 USD
Prezzo di listino
Prezzo scontato
$362.00 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
Il MOTORE AD ALTO MOMENTO HTDW-6056-36-NE-JC è un modulo motore ad alto momento che presenta un rapporto di riduzione di 36 e una struttura a rulli incrociati. È specificato per un funzionamento a 12-48V con risoluzione dell'encoder di ingresso/uscita a 14 bit ed è progettato per un'attuazione precisa a bassa velocità e ad alto momento.
Caratteristiche principali
- Modello: HTDW-6056-36-NE-JC (anche etichettato HTDW-6056-36-JC sulla grafica del prodotto)
- Versione a rulli incrociati
- Gioco ridotto: <10Arcmin
- Risoluzione dell'encoder: 14-bit (ingresso), 14-bit (uscita)
- Frequenza di controllo: 3kHz
- Tempo di risposta veloce: ≤200us
Specifiche
| Dimensioni e larghezza | 60mm |
| Altezza | 56mm |
| Peso | 570g |
| Gioco | <10Arcmin |
| Precisione di ripetizione della posizione | <12Arcmin |
| Precisione di posizionamento assoluto | <15Arcmin |
| Costante di coppia | / |
| Numero di coppie di poli | 14 |
| Rapporto di riduzione | 36 |
| Momento di bloccaggio | 36Nm |
| RPM a vuoto | 60RPM |
| Momento nominale | 10Nm |
| RPM nominali | 50RPM |
| Valutazione | 52W |
| Intervallo di tensione | 12-48V |
| Corrente di picco | 10A |
| Precisione di controllo della velocità | ±10% |
| Risoluzione dell'encoder di ingresso | 14-bit |
| Velocità di trasmissione | 5Mbps |
| Corrente nominale | 3A |
| Precisione di controllo | ±20% |
| Tempo di risposta | ≤200us |
| Risoluzione dell'encoder di uscita | 14-bit |
| Frequenza di controllo | 3kHz |
Applicazioni
- Robot Umani
- Bracci Robotici
- Eseoscheletri
- Robot Quadrupedi
- Veicoli AGV
- Robot ARU
Per supporto all'integrazione e domande pre-vendita, contattare [email protected] or visita https://rcdrone.top/.
Manuali & Download
- Manuale utente dell'assistente al debug del motore ad ALTO MOMENTO TORCENTI (PDF)
- Manuale di debug (PDF)
- Analisi del protocollo 1.2 fdcan (PDF)
- Manuale utente (PDF)
- Modello 3D HTDW-6056-36-NE-JC (STP in ZIP)
Dettagli

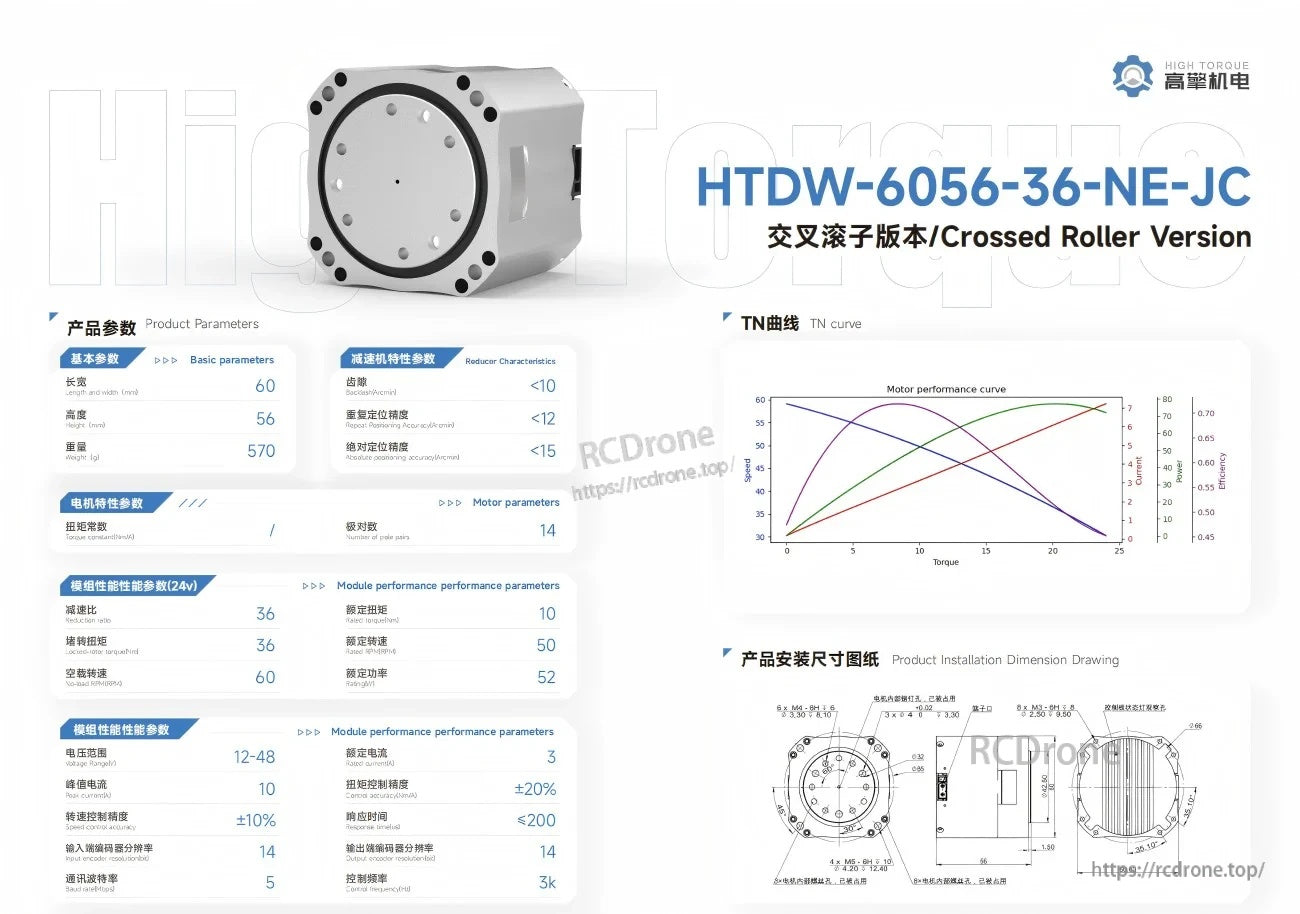
Parametri dettagliati e dimensioni di montaggio per la versione a rulli incrociati aiutano a confermare l'adattamento e le prestazioni prima dell'integrazione.
Related Collections

