Holybro DroneCAN M8N Modulo GPS - Processore STM32G4 Bussola BMM150 Supporto 3GNSS Protocollo DroneCAN
Holybro DroneCAN M8N Modulo GPS - Processore STM32G4 Bussola BMM150 Supporto 3GNSS Protocollo DroneCAN
HolyBro
Impossibile caricare la disponibilità di ritiro
Descrizione
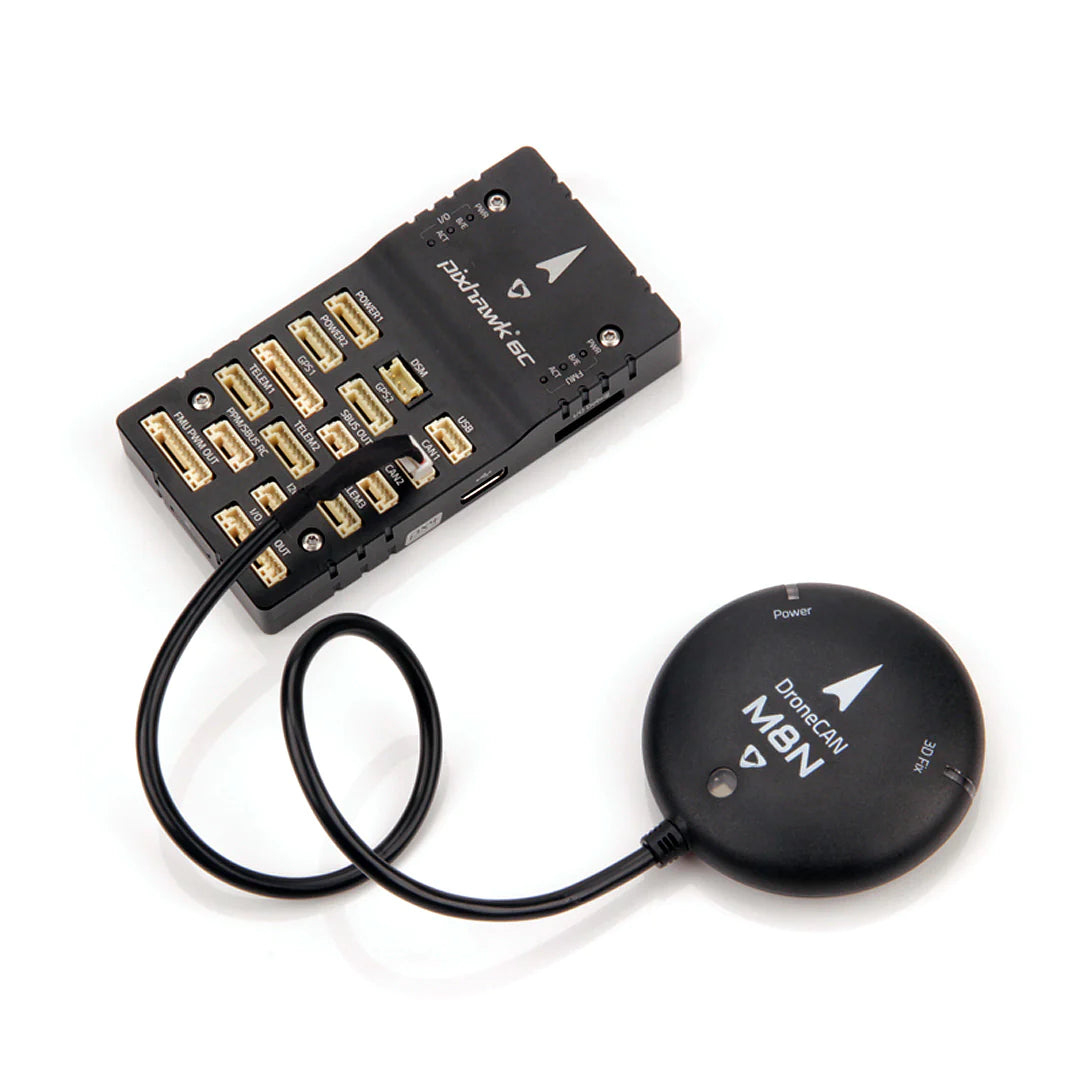
Il GPS Holybro DroneCAN ha un modulo UBLOX M8N o M9N, bussola BMM150, indicatore LED tricolore. Ha il processore STM32G4 e ha adottato il protocollo DroneCAN per la comunicazione, rendendolo più affidabile e migliore nella gestione delle interferenze elettromagnetiche rispetto alla connessione seriale. Non occupa alcuna porta seriale del controllore di volo e diversi dispositivi CAN possono essere collegati allo stesso bus CAN tramite una scheda splitter CAN.
Specifica:
| DroneCAN M8N | |
| Ricevitore GNSS | Ublox NEO M8N |
| Numero di GNSS simultanei | Fino a 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Processore | STM32G4 (170 MHz, 512K FLASH) |
| Bussola | BMM150 |
| Banda di frequenza | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| Sistema di potenziamento GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Aggiornamento navigazione | 5 Hz predefinito (10 Hz MAX) |
| Precisione | 2,5m |
| Precisione della velocità | 0,05 m/s |
| Numero massimo di satelliti | 22+ |
| Protocollo di comunicazione | DroneCAN @ 1 Mbit/s |
| Supporta il firmware del pilota automatico | PX4, Ardupilot |
| Tipo di porta | GHR-04V-S |
| Antenna | Antenna patch in ceramica 25 x 25 x 4 mm |
| Consumo energetico | Meno di 200 mA a 5 V |
| Tensione | 4,7-5,2V |
| Temperatura operativa | -40~80°C |
| Taglia | Diametro: 54 mm Spessore: 14,5 mm |
| Peso | 36g |
| Lunghezza cavo | 26 cm |
| Altre note | - Amplificatore RF LNA MAX2659ELT+ - Capacità Farah ricaricabile - Regolatore a basso rumore da 3,3 V |
Per altre informazioni tecniche, visitare https://docs.holybro.com/
DroneCAN
DroneCAN è il protocollo CAN principale utilizzato dai progetti ArduPilot e PX4 per la comunicazione con le periferiche CAN. È un protocollo aperto con comunicazione aperta, specifiche e molteplici implementazioni aperte.
Sviluppo DroneCAN
Il progetto DroneCAN ha una comunità di sviluppo attiva.
- discussioni su discordia su https://dronecan.org/discord
- sviluppo su github su https://github.com/DroneCAN
Related Collections