Holybro Pixhawk 4 Controllore di volo con pilota automatico
Holybro Pixhawk 4 Controllore di volo con pilota automatico
HolyBro
Impossibile caricare la disponibilità di ritiro
Pixhawk® 4 è dotato della tecnologia di processore avanzata di STMicroelectronics®, della tecnologia dei sensori di Bosch®, di InvenSense® e di un sistema operativo in tempo reale NuttX, offrendo prestazioni, flessibilità e affidabilità incredibili per il controllo di qualsiasi veicolo autonomo.
Il microcontrollore del Pixhawk 4 ha una memoria flash da 2 MB e 512 KB di RAM. Con l'aumento di potenza e risorse RAM, gli sviluppatori possono essere più produttivi ed efficienti nel loro lavoro di sviluppo. Algoritmi e modelli più complessi possono essere implementati in modalità autopilota.
Le IMU ad alte prestazioni e basso rumore a bordo sono progettate per applicazioni di stabilizzazione. I segnali pronti per i dati da tutti i sensori vengono instradati verso pin di acquisizione di interrupt e timer separati sul pilota automatico, consentendo un time-stamping preciso dei dati dei sensori. Gli isolamenti delle vibrazioni di nuova concezione consentono letture più accurate, consentendo ai veicoli di raggiungere migliori prestazioni di volo complessive.
I due bus SPI esterni e le sei linee di selezione chip associate consentono di aggiungere sensori aggiuntivi e payload interfacciati SPI. Ci sono in totale quattro bus I2C, due dedicati all'uso esterno e due raggruppati con porte seriali per moduli GPS/Compass.
Nota:
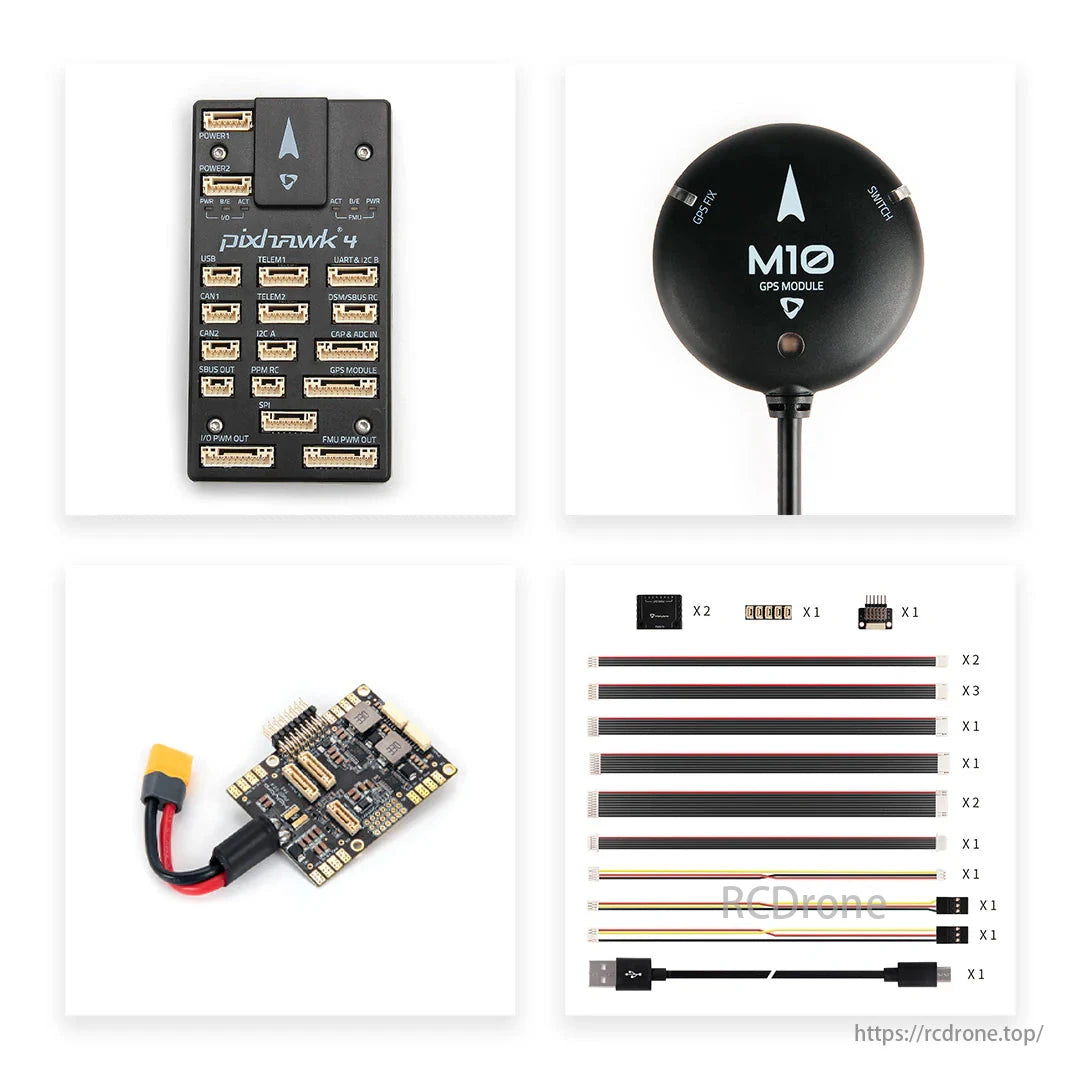
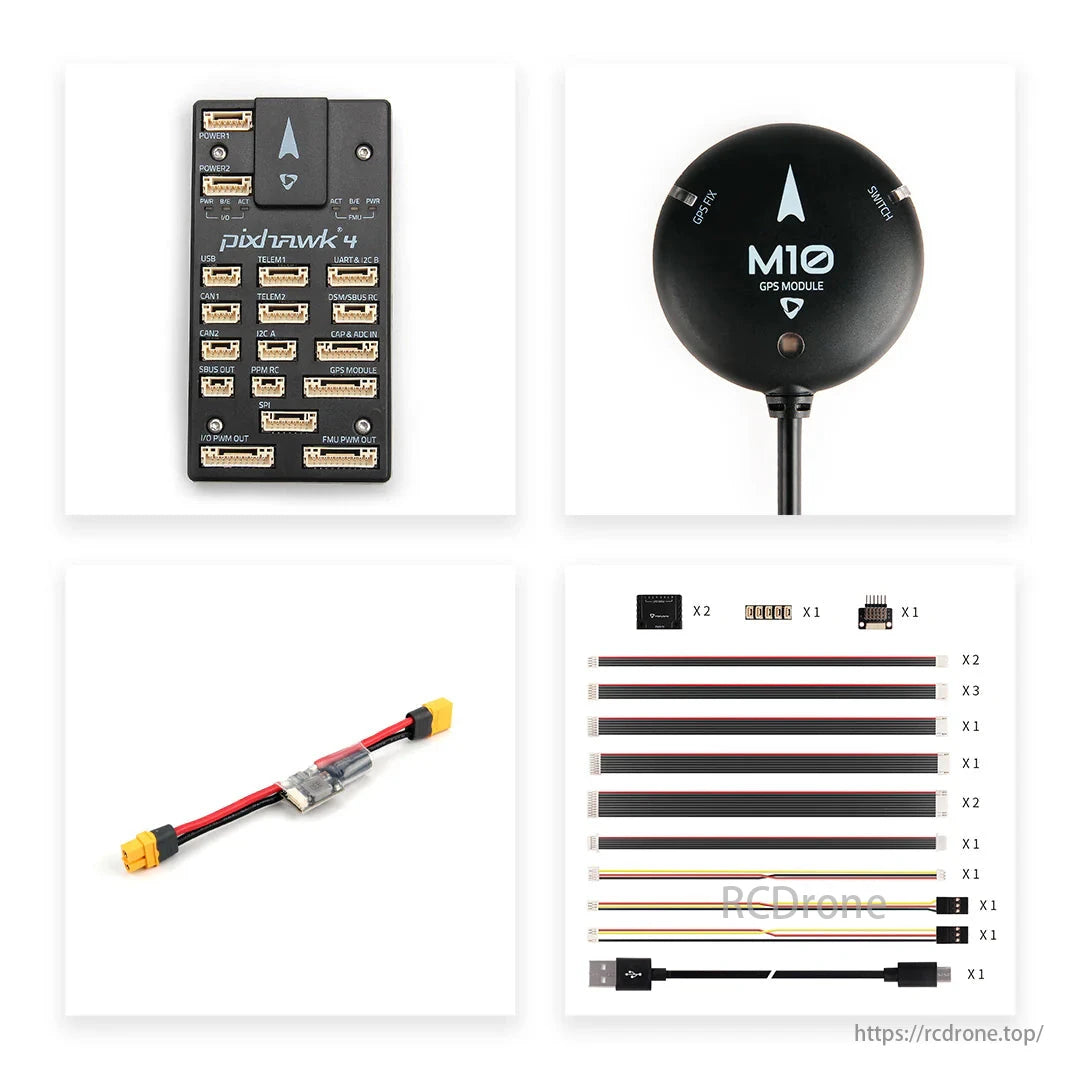
- Richiede GPS M10 PX4 1.14 e ArduPilot 4.3 o versioni successive.
- Tabella comparativa dei moduli di potenza
Specifiche tecniche
- Processore FMU principale
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216 MHz, 2 MB di memoria, 512 KB di RAM
- STM32F765 - 32 Bit Arm ® Cortex® -M7, 216 MHz, 2 MB di memoria, 512 KB di RAM
- Processore IO
- STM32F103 - Arm® Cortex®-M3 a 32 bit, 72 MHz, 64 KB SRAM (attuale)
- STM32F100 - Arm ® Cortex® -M3 a 32 bit, 24 MHz, SRAM da 8 KB (fuori produzione)
- Sensori di bordo
- Accel/Giroscopio: ICM-20689
- Accelerometro/giroscopio: BMI055/ICM-20602
- Rivista: IST8310
- Barometro: MS5611
- Accel/Giroscopio: ICM-20689
Dati elettrici
- Uscita modulo di potenza: 4,9~5,5 V
- Tensione massima di ingresso: 6V
- Rilevamento corrente massima: 120A
- Ingresso alimentazione USB: 4,75~5,25 V
- Ingresso servo rail: 0~36V
- Temperatura di esercizio: -25-85°C
Dati meccanici
- Dimensioni: 44x84x12mm
- Peso (custodia in plastica): 33.3g
- Peso (custodia in alluminio): 49 g
Scarica:
Codice articolo 11032/11035 Include:
- Pixhawk 4 Flight Controller (plastica o alluminio)
- Set di cavi
Codice articolo 20045/20046/20114/20115 Include:
- Controllore di volo Pixhawk 4 (Plastica o Alluminio)
- Modulo di potenza: Modello PM02 V3 12S/PM07 14S
- Set di cavi
Codice articolo 20139/20140/20141/20142/20269/20270/20271/20272 Include:
- Controllore di volo Pixhawk 4
- Modulo di potenza: Modello PM02 V3 12S/PM07 14S
- Posizione GPS: M9N/M10
- Set di cavi

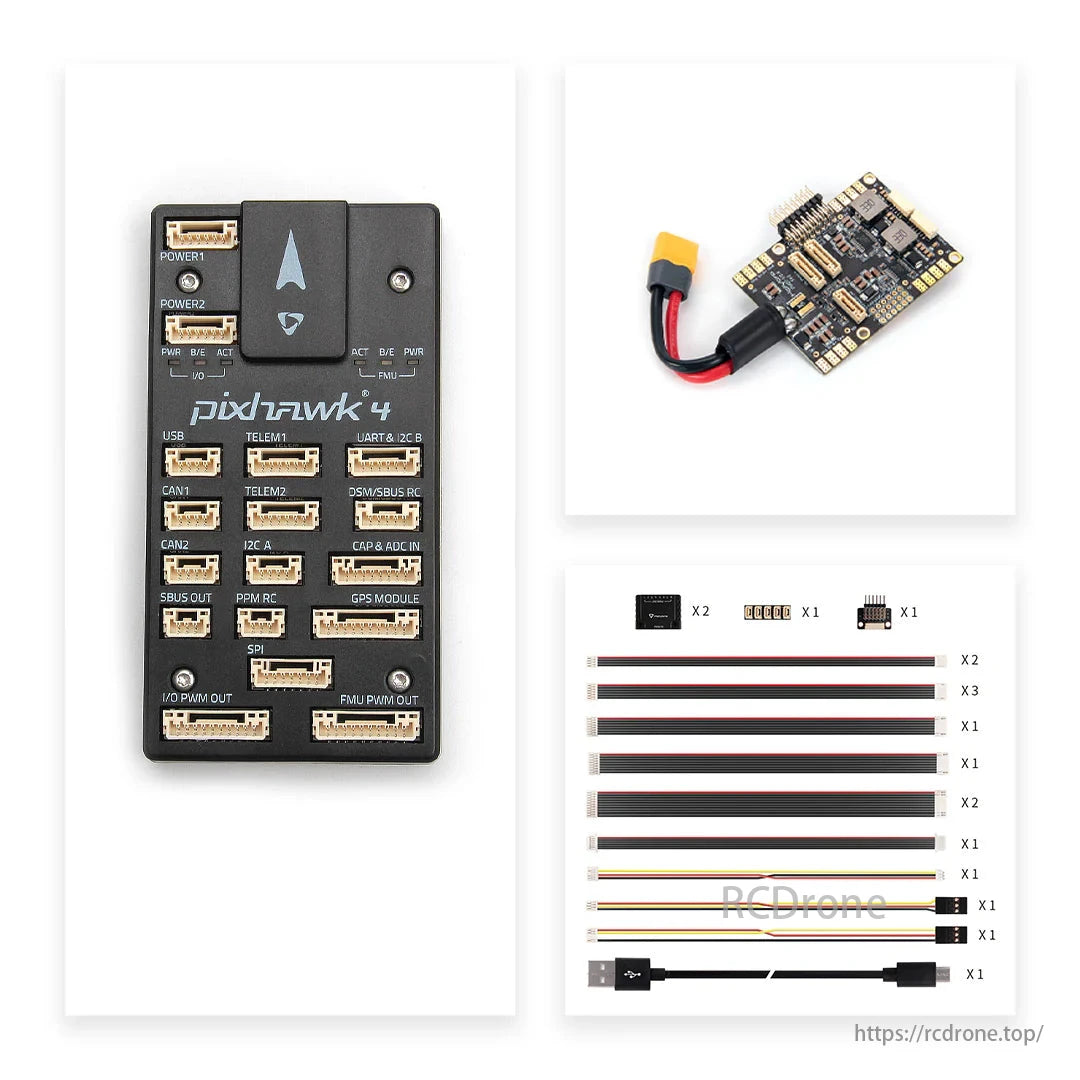
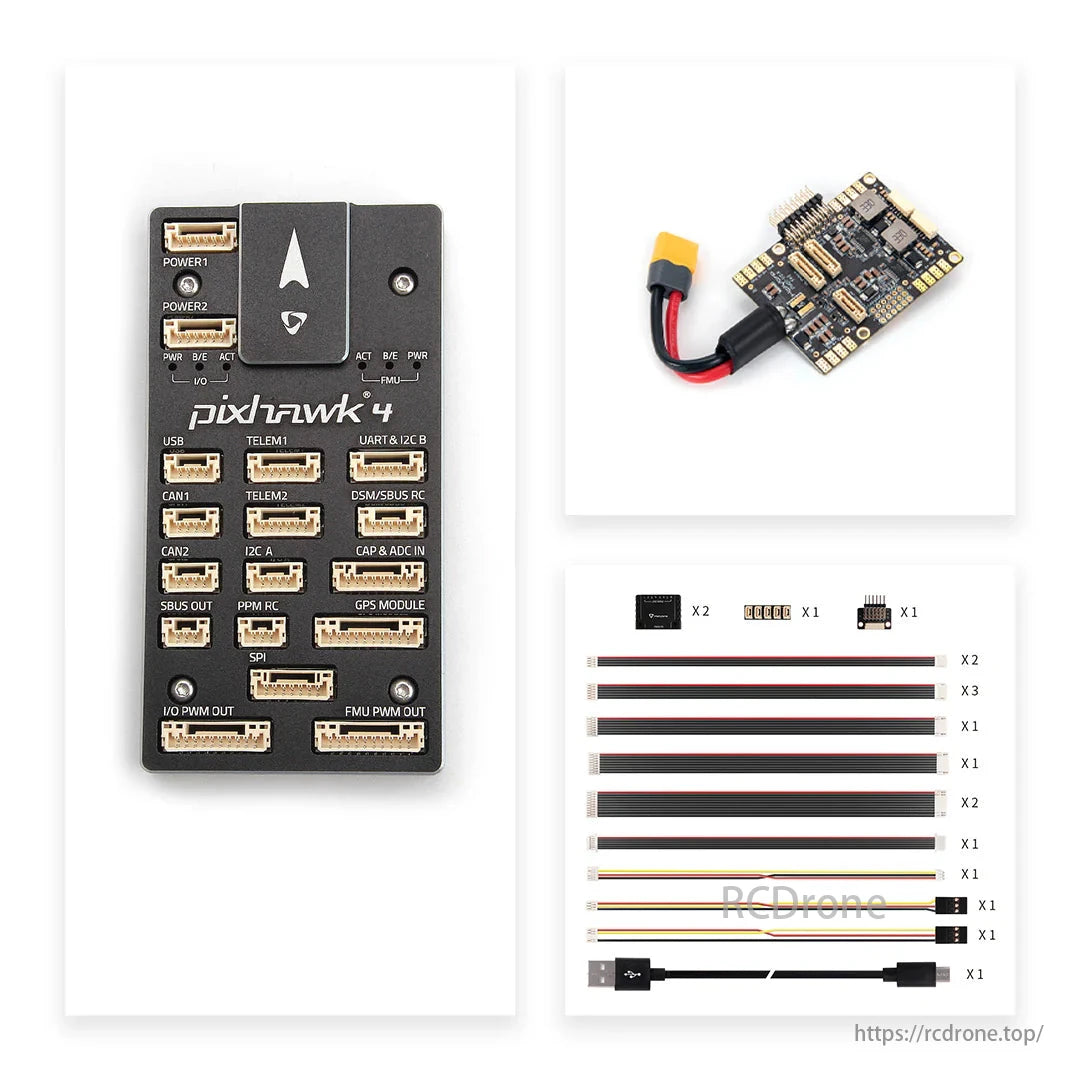
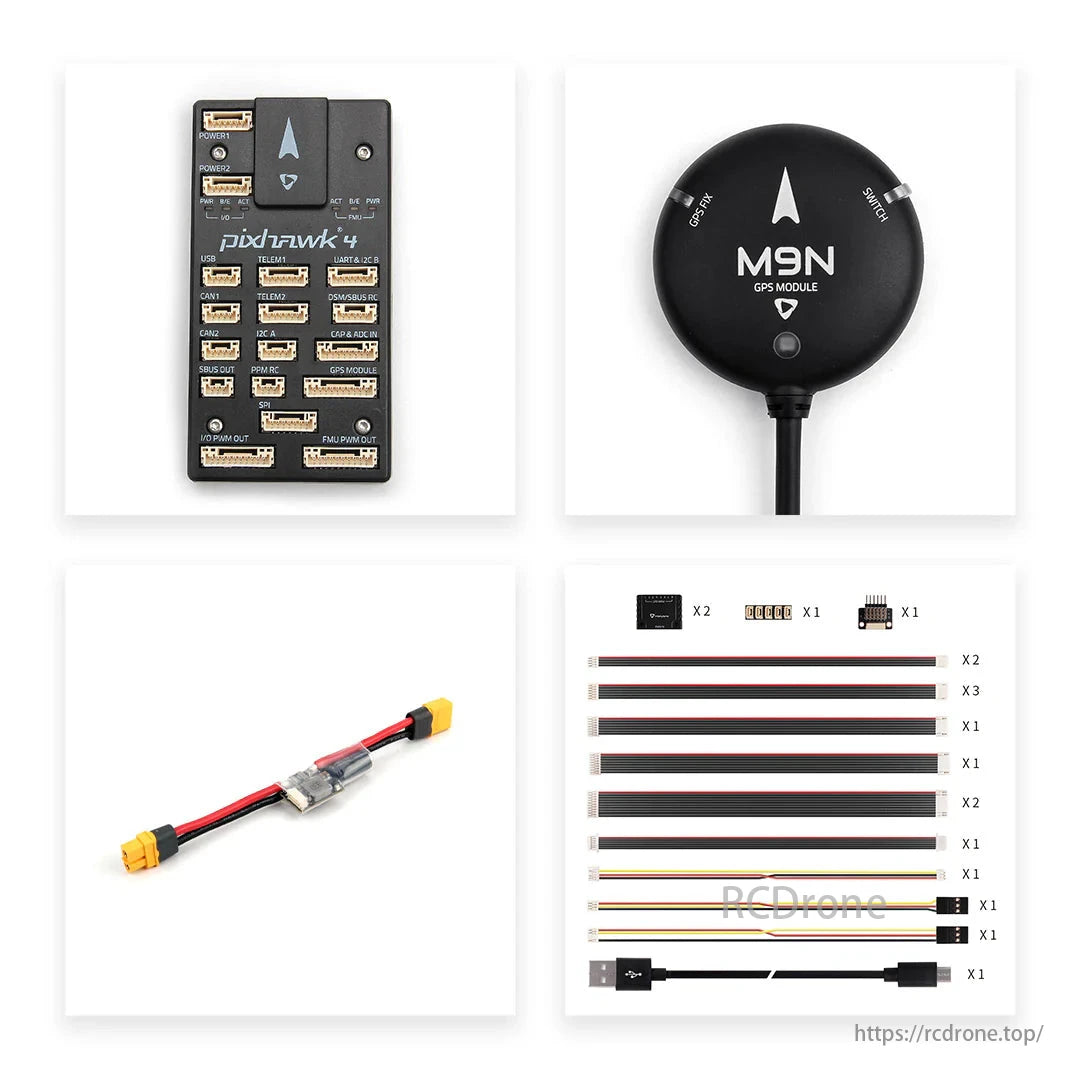
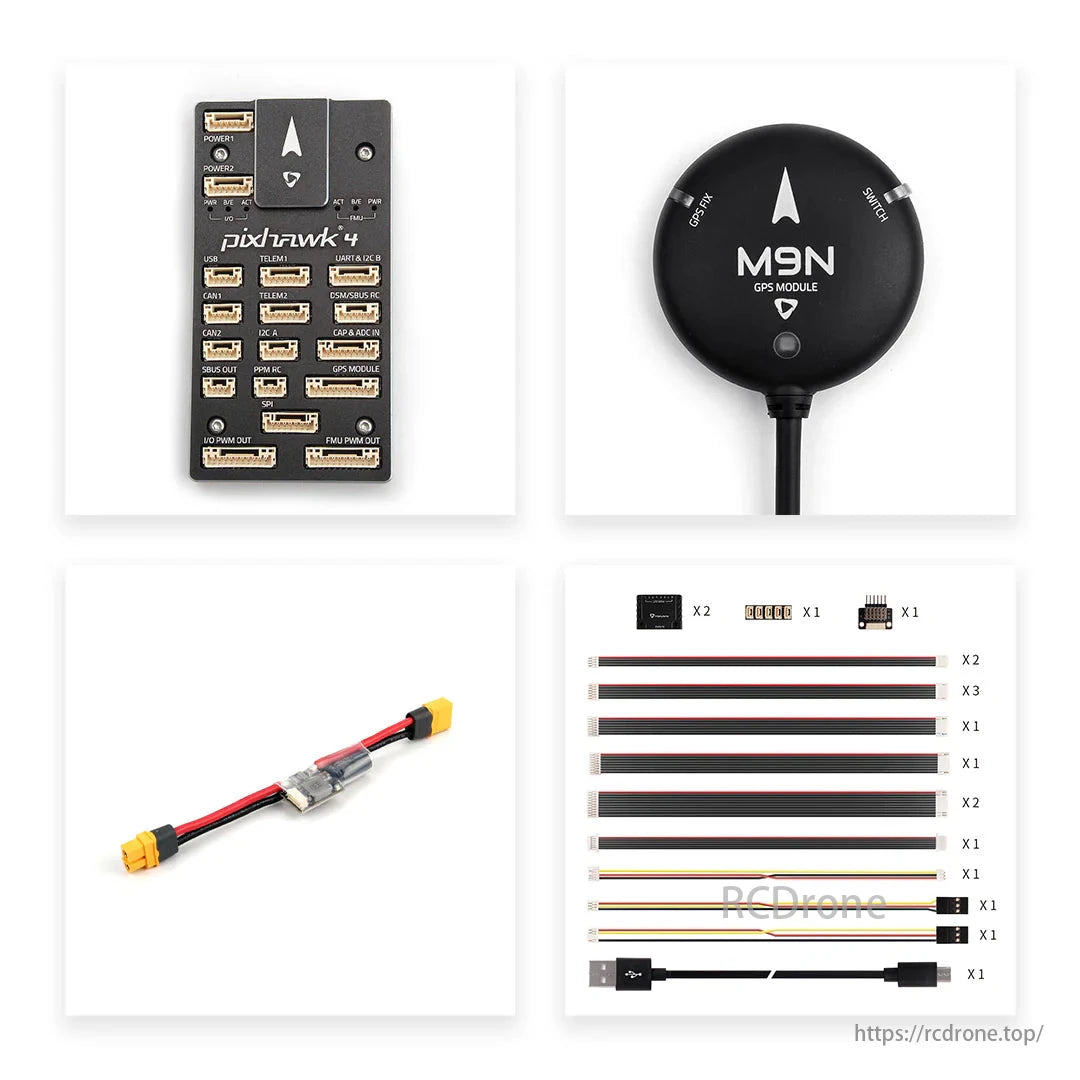
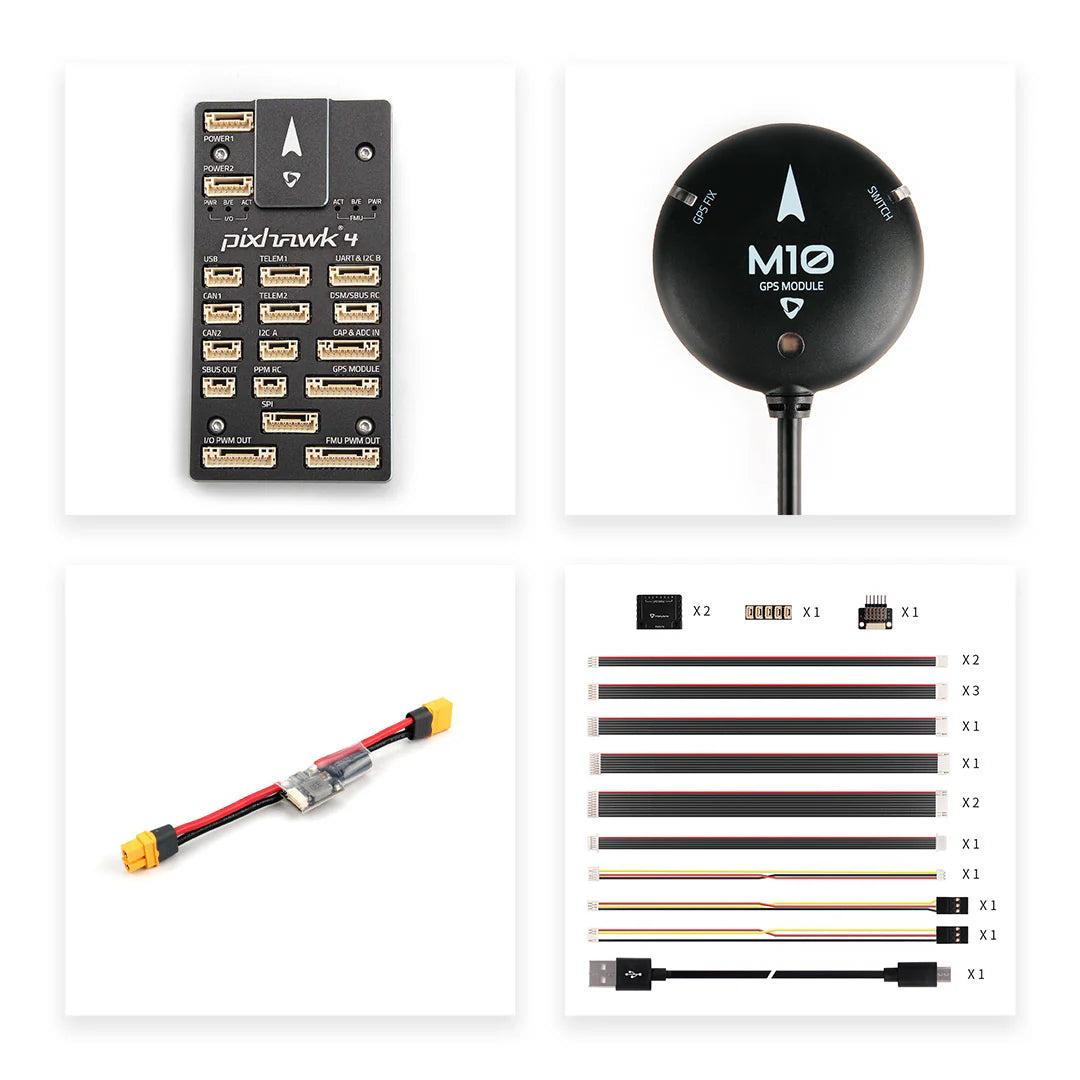
Controllore di volo Pixhawk 4 con varie porte tra cui USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI e MODULO GPS.

Controllore di volo Pixhawk, alimentato dal sistema di pilota automatico PX4.

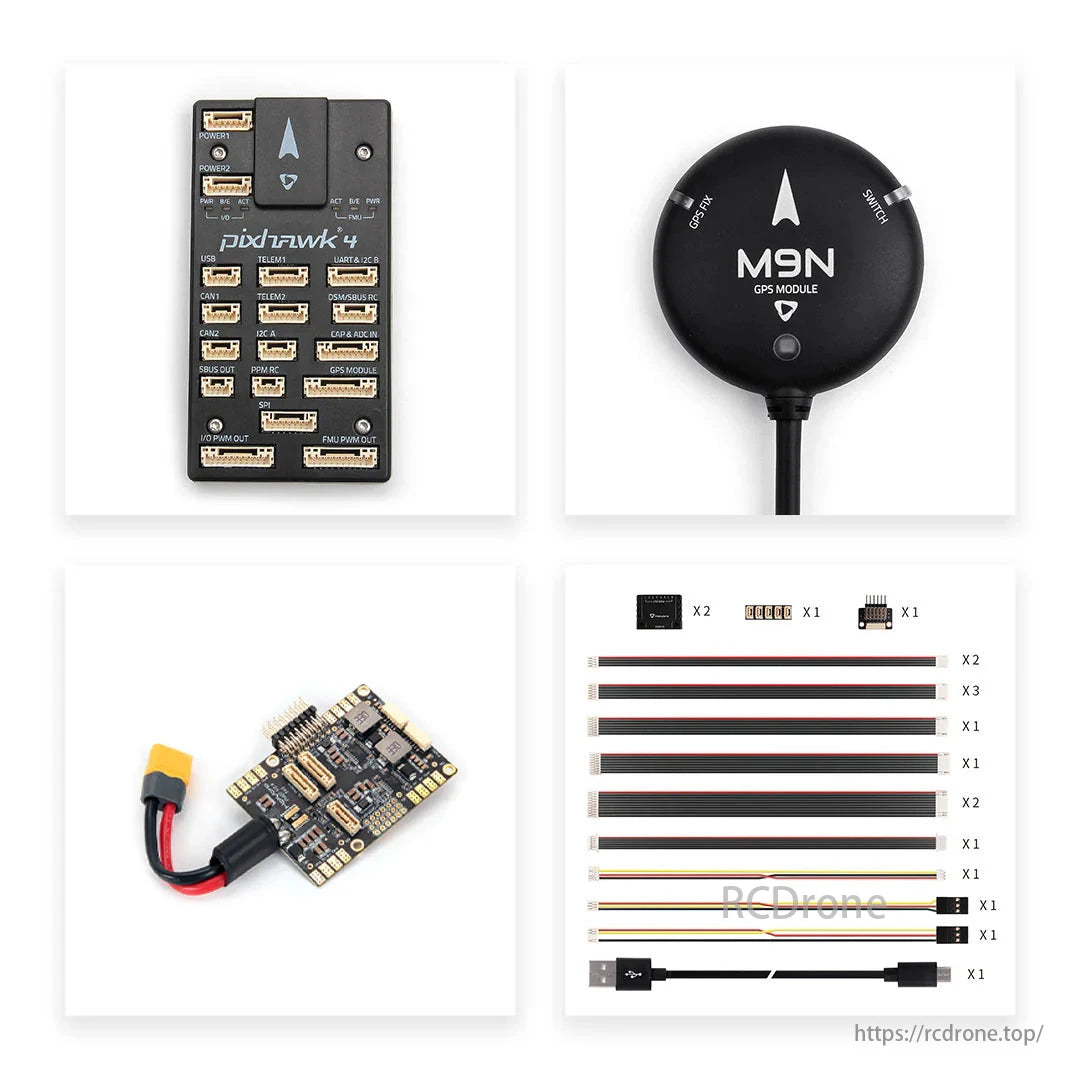
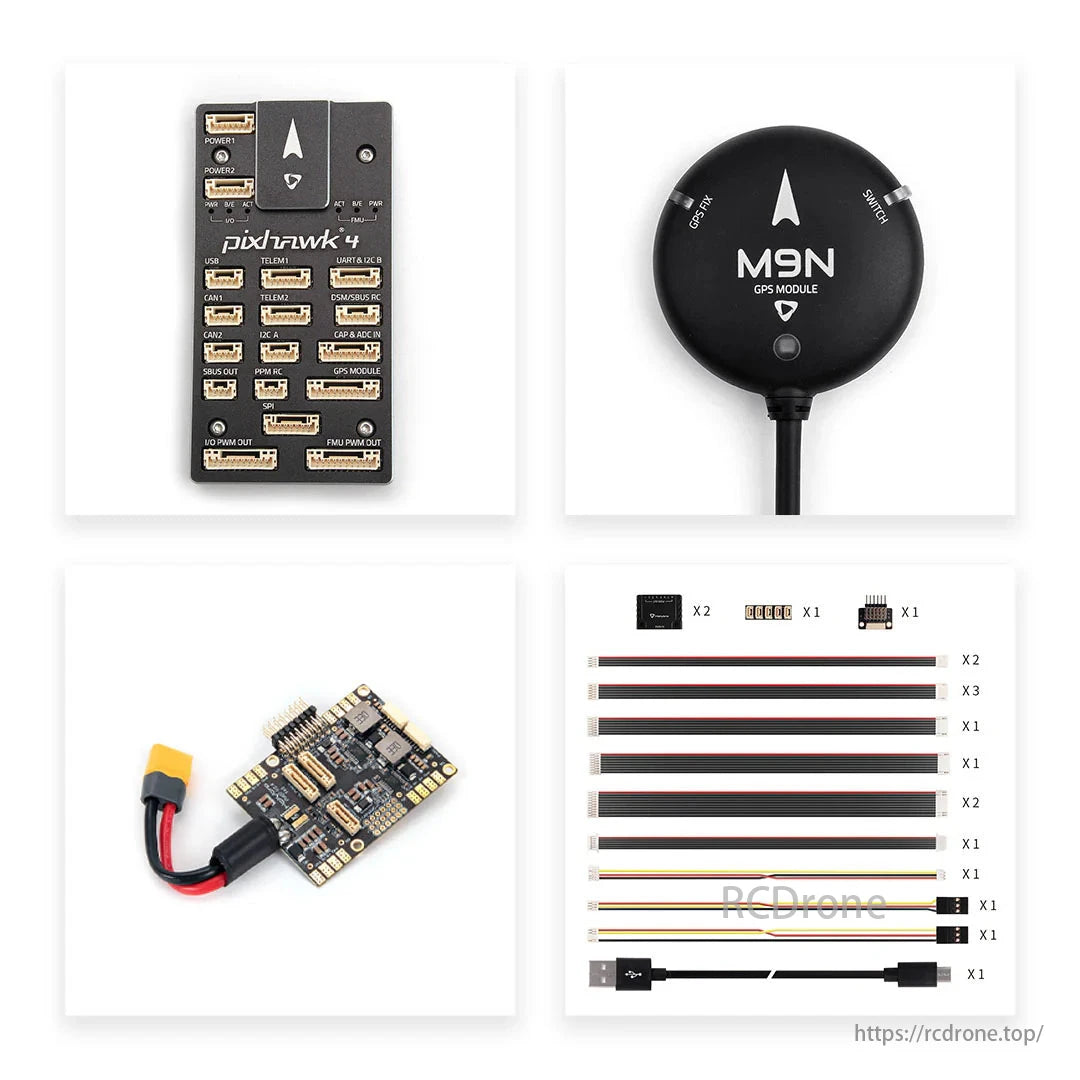
Controllore di volo Pixhawk 4, modulo GPS M9N, modulo di alimentazione con connettore XT60 e vari cavi per l'assemblaggio del drone RC.

Controller di volo Pixhawk 4 con varie porte, tra cui USB, CAN e modulo GPS. Include un modulo di alimentazione e più cavi per le connessioni.

Controllore di volo Pixhawk 4, modulo GPS M9N, modulo di alimentazione con connettore XT60 e vari cavi per i collegamenti.
Related Collections