Holybro Pixhawk 6X (ICM-45686) Flight Controller – IMU tripla ridondanza, STM32H753, Ethernet, compatibile con PX4 e ArduPilot
Holybro Pixhawk 6X (ICM-45686) Flight Controller – IMU tripla ridondanza, STM32H753, Ethernet, compatibile con PX4 e ArduPilot
HolyBro
Impossibile caricare la disponibilità di ritiro
Panoramica
Il Holybro Pixhawk 6X (ICM-45686) è un controller di volo autopilotato modulare ad alte prestazioni, progettato per applicazioni industriali e commerciali di droni esigenti. Dotato di IMU ICM-45686 a tripla ridondanza con tecnologia BalancedGyro™, barometri doppi e un processore STM32H753 che opera a 480 MHz, il Pixhawk 6X offre un'affidabilità senza pari, prestazioni in tempo reale e flessibilità. La sua architettura modulare, avanzata isolamento dalle vibrazioni e interfaccia Ethernet lo rendono ideale per sistemi UAV che richiedono un controllo robusto, precisione e adattabilità alle missioni.
Caratteristiche Principali
-
Tripla Ridondanza IMU: 3x ICM-45686 IMU (±32g) con tecnologia BalancedGyro™ per navigazione inerziale tollerante ai guasti
-
Barometri Doppio: ICP20100 e BMP388 per una maggiore precisione altimetrica
-
Processore ad Alta Velocità: STM32H753 Cortex-M7, 480MHz, con 2MB Flash & 1MB RAM
-
Design Modulare: Separa FMU, IMU e scheda di base, collegati tramite bus Pixhawk® a 100 pin & 50 pin
-
Scheda IMU Controllata dalla Temperatura: Garantisce prestazioni ottimali del sensore su intervalli di temperatura
-
Integrazione Ethernet: Supporta comunicazioni ad alta velocità con computer di missione
-
Supporto per Moduli di Alimentazione Digitale: Fornisce misurazioni di tensione e corrente più accurate
Sistema di Isolamento Avanzato: Materiale durevole, formulato su misura, offre un'ottima attenuazione delle vibrazioni
-
Compatibilità del Firmware: Viene fornito con PX4 (v1.14.3+), supporta ArduPilot (v4.5.0+)
Specifiche
Processori e Sensori
| Componente | Dettagli |
|---|---|
| Processore FMU | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| Processore IO | STM32F103, ARM Cortex-M3, 72MHz |
| Sensori IMU | 3x ICM-45686 (BalancedGyro™) |
| Barometro | ICP20100 & BMP388 |
| Magnetometro | BMM150 |
| Elemento Sicuro | NXP SE050 Plug & Trust |
Parametri Elettrici
| Parametro | Value |
|---|---|
| Massima Tensione di Ingresso | 6V |
| Ingresso Alimentazione USB | 4.75~5.25V |
| Voltaggio del Servo Rail | 0~36V |
| Limite di Corrente Telem1 & GPS2 | 1.5A combinato |
| Limite di Corrente Altri Porti | 1.5A combinato |
| Voltaggio Segnale PWM | Predefinito 3.3V (commutabile a 5V tramite resistore) |
| Temperatura di Funzionamento | -25°C a +85°C |
Dimensioni Meccaniche & Peso
| Componente | Dimensioni (mm) | Peso (g) |
|---|---|---|
| Controllore di Volo | 38.8 x 31.8 x 16.8 | 31.3g |
| Piastra Base Standard | 52.4 x 102 x 16.7 | 72.5g |
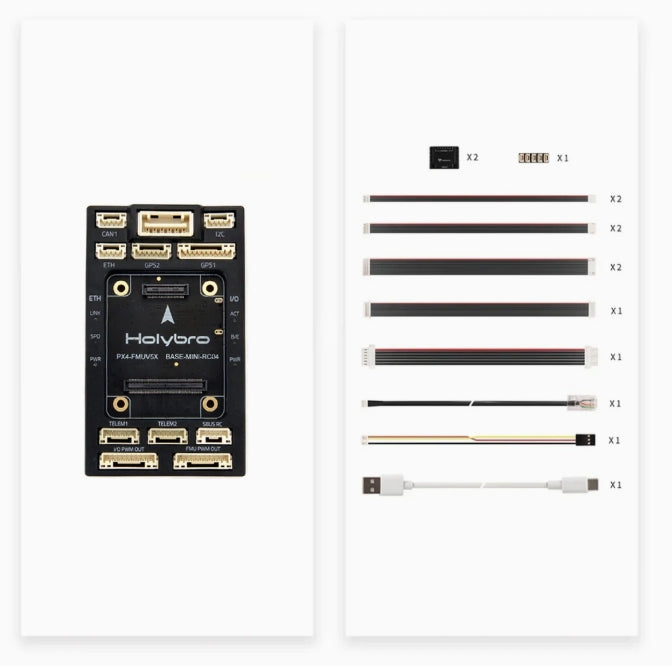
| Mini Baseboard | 43.4 x 72.8 x 14.2 | 26.5g |
Compatibilità del Firmware
-
PX4: Supportato completamente dalla versione 1.14.3 e successive
-
ArduPilot: Supportato completamente dalla versione 4.5.0 e oltre
-
Il flashing del firmware è supportato tramite Mission Planner o QGroundControl
Applicazioni
Ideale per l'integrazione in:
-
Droni industriali
-
Sistemi UAV commerciali
-
Aerei VTOL
-
Piattaforme di ricerca accademica
-
Missioni multi-sensore e ad alta affidabilità
Dettagli

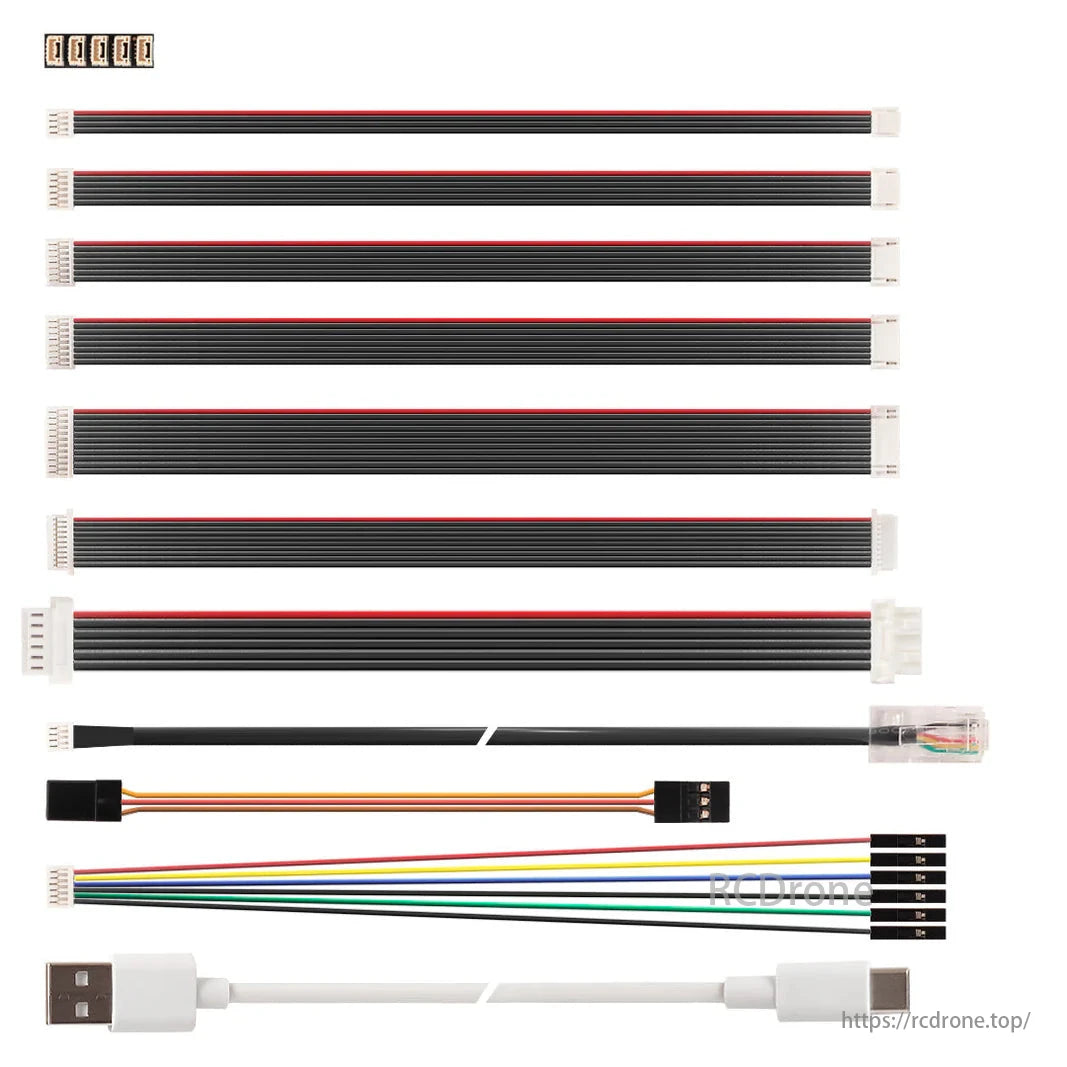
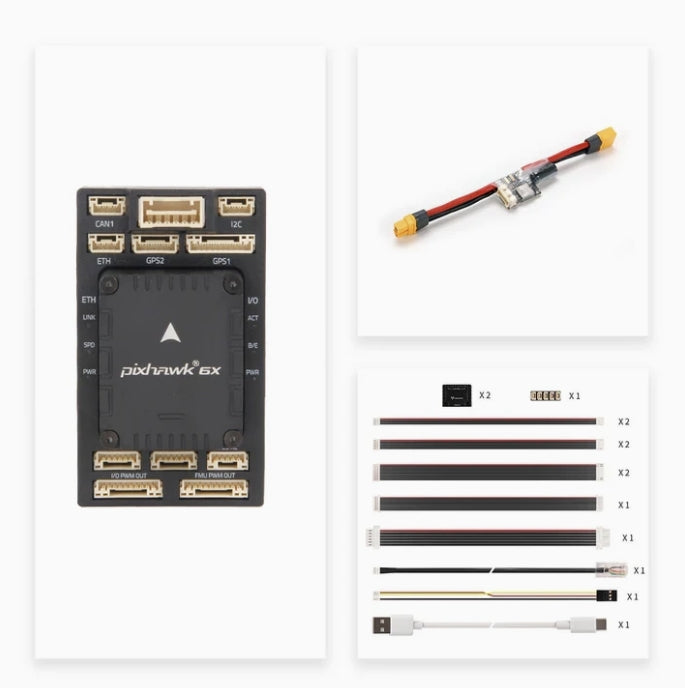
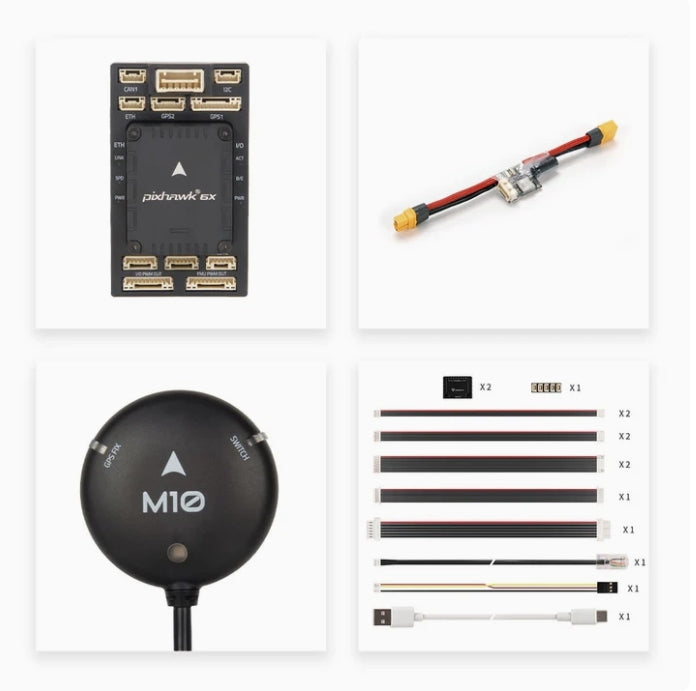
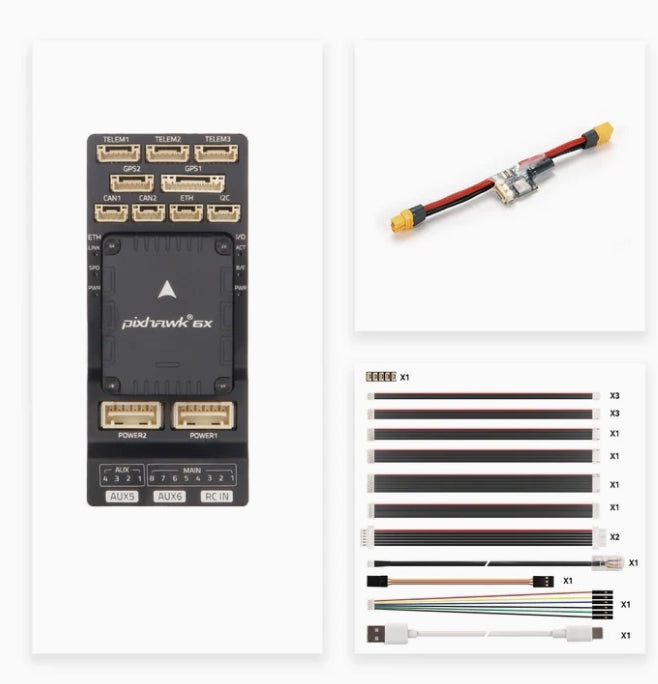
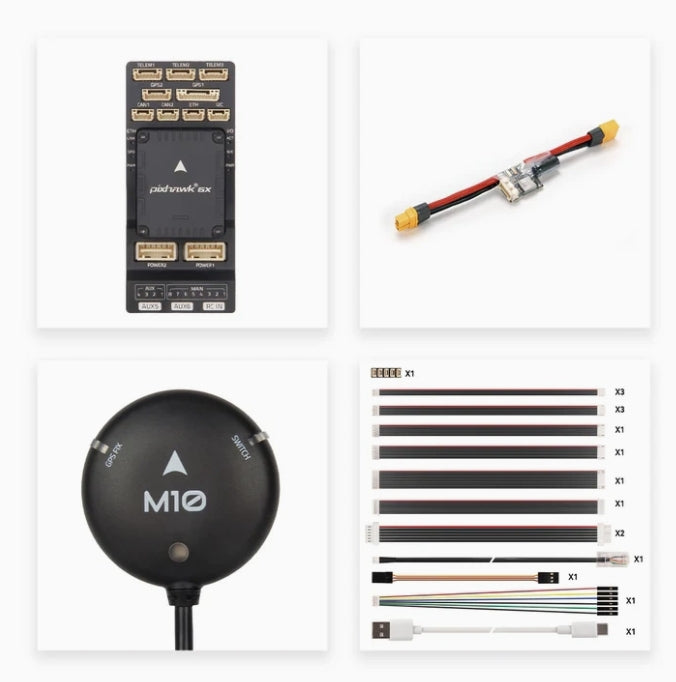
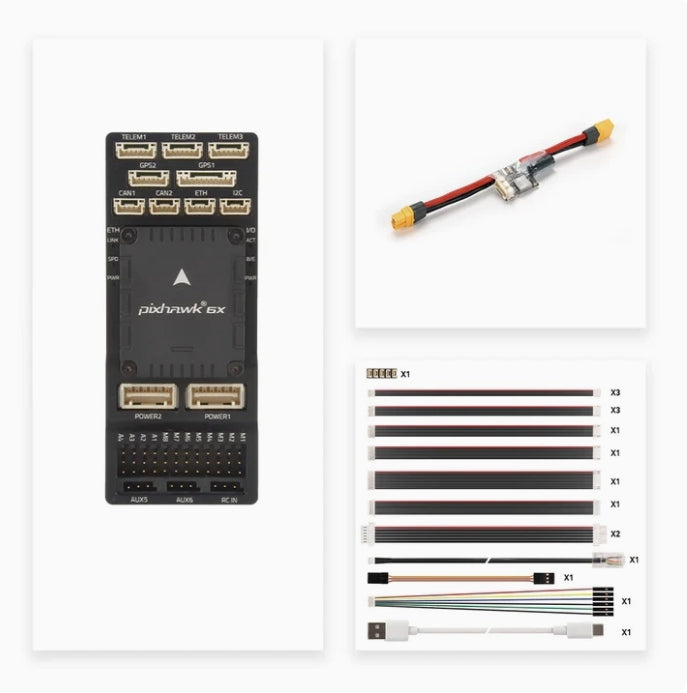
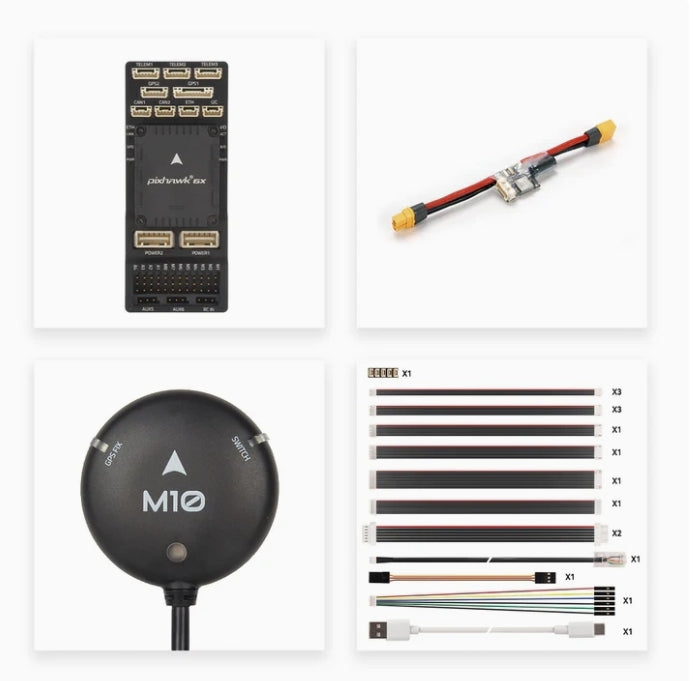
Pixhawk 6X offre un design più snello con due modelli. Presenta un connettore a pin migliorato per una migliore connettività e prestazioni, rendendolo ideale per applicazioni avanzate. Scegli il modello giusto per le tue esigenze.
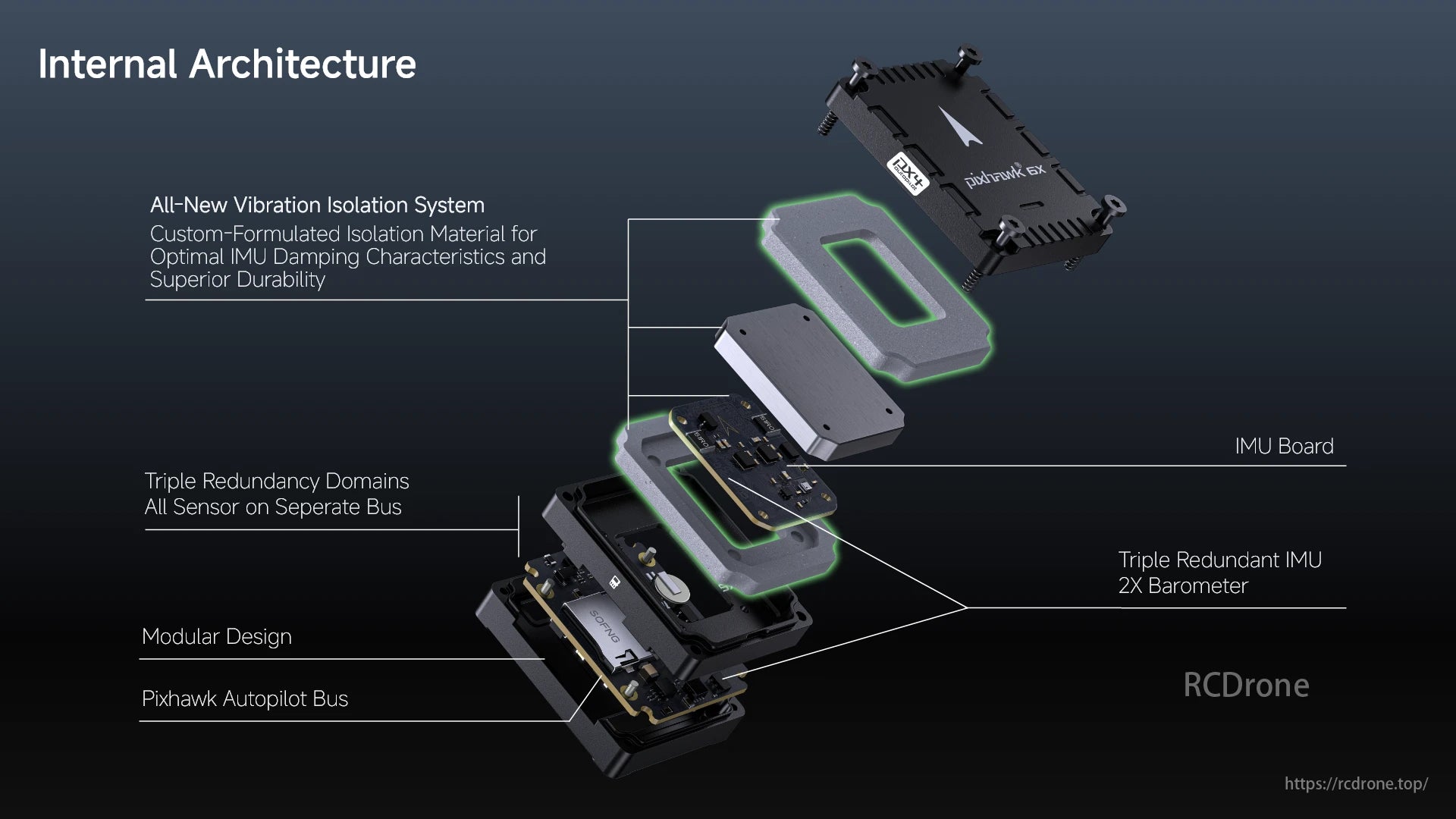
Holybro Pixhawk 6X offre isolamento dalle vibrazioni, tripla ridondanza, design modulare, bus autopilota, scheda IMU e 2x barometro per prestazioni avanzate.
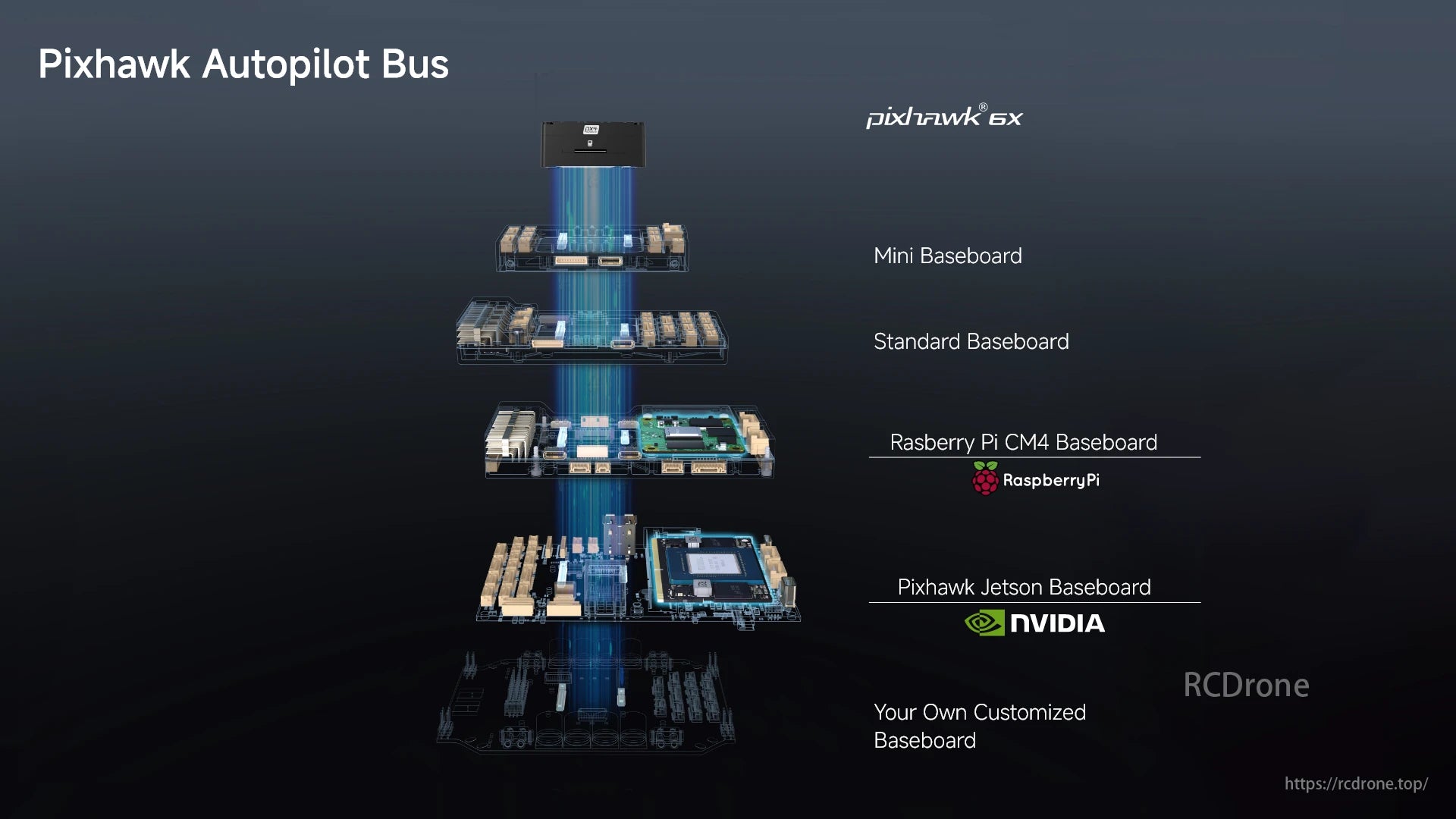
Pixhawk Il bus autopilota include Pixhawk 6X, Mini Baseboard, Standard Baseboard, Raspberry Pi CM4 Baseboard, Jetson Baseboard e opzioni personalizzate.

Resistori di compensazione della temperatura, IMU e barometro ridondanti, tecnologie sensoriali diverse e materiale di isolamento garantiscono precisione.

Il bus autopilota Pixhawk, il processore STM H753 a 32 bit (480 MHz), l'IMU Invensense ICM45686 con tecnologia BalancedGyro e l'elemento sicuro NXP EdgeLock SE050 sono integrati nella scheda FMU.
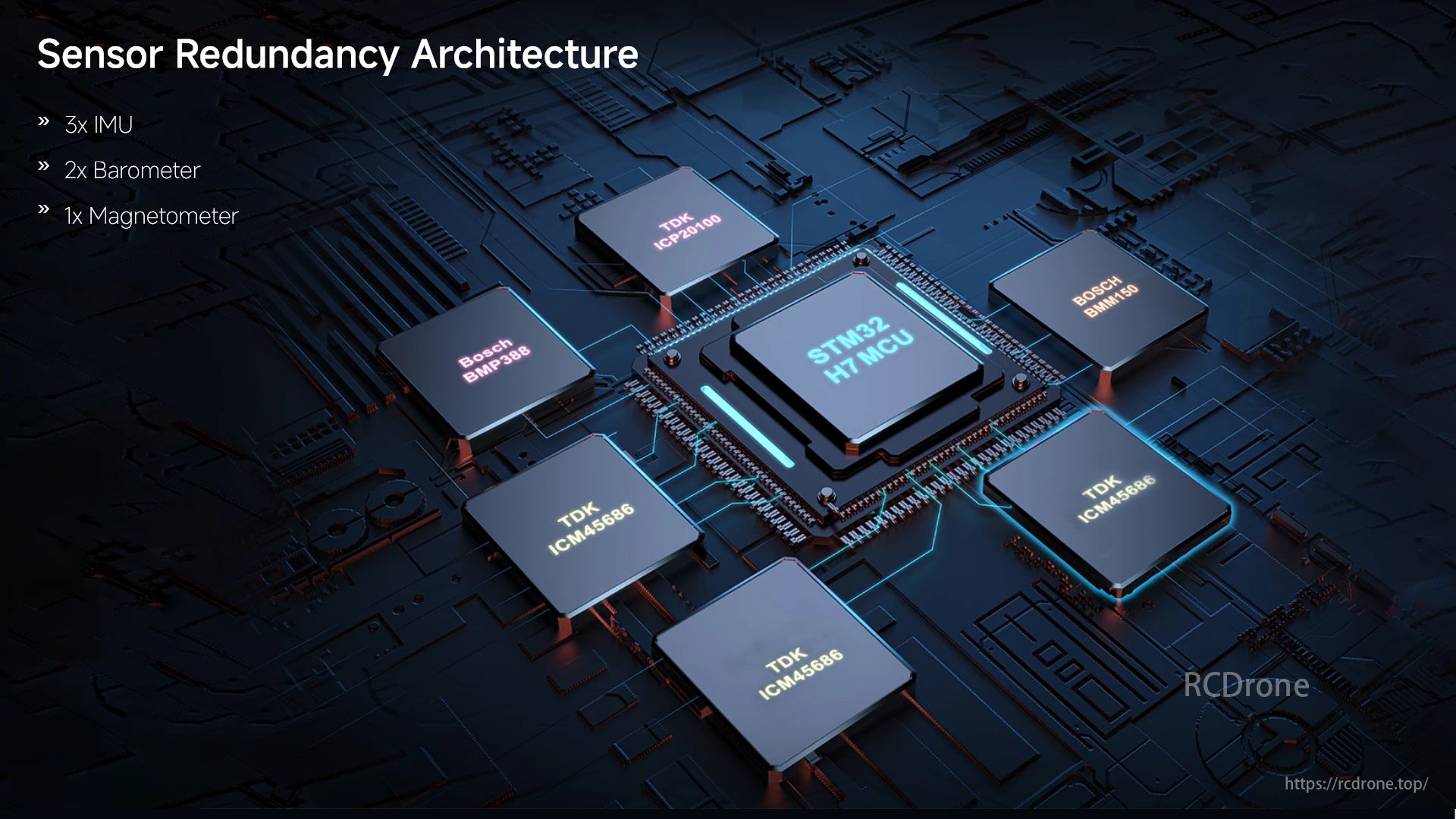
Architettura di ridondanza dei sensori con 3x IMU, 2x barometro e 1x magnetometro. Caratteristiche del microcontrollore STM32 H7, sensori TDK ICM-45686, Bosch BMP388 e BMM50 per prestazioni migliorate.
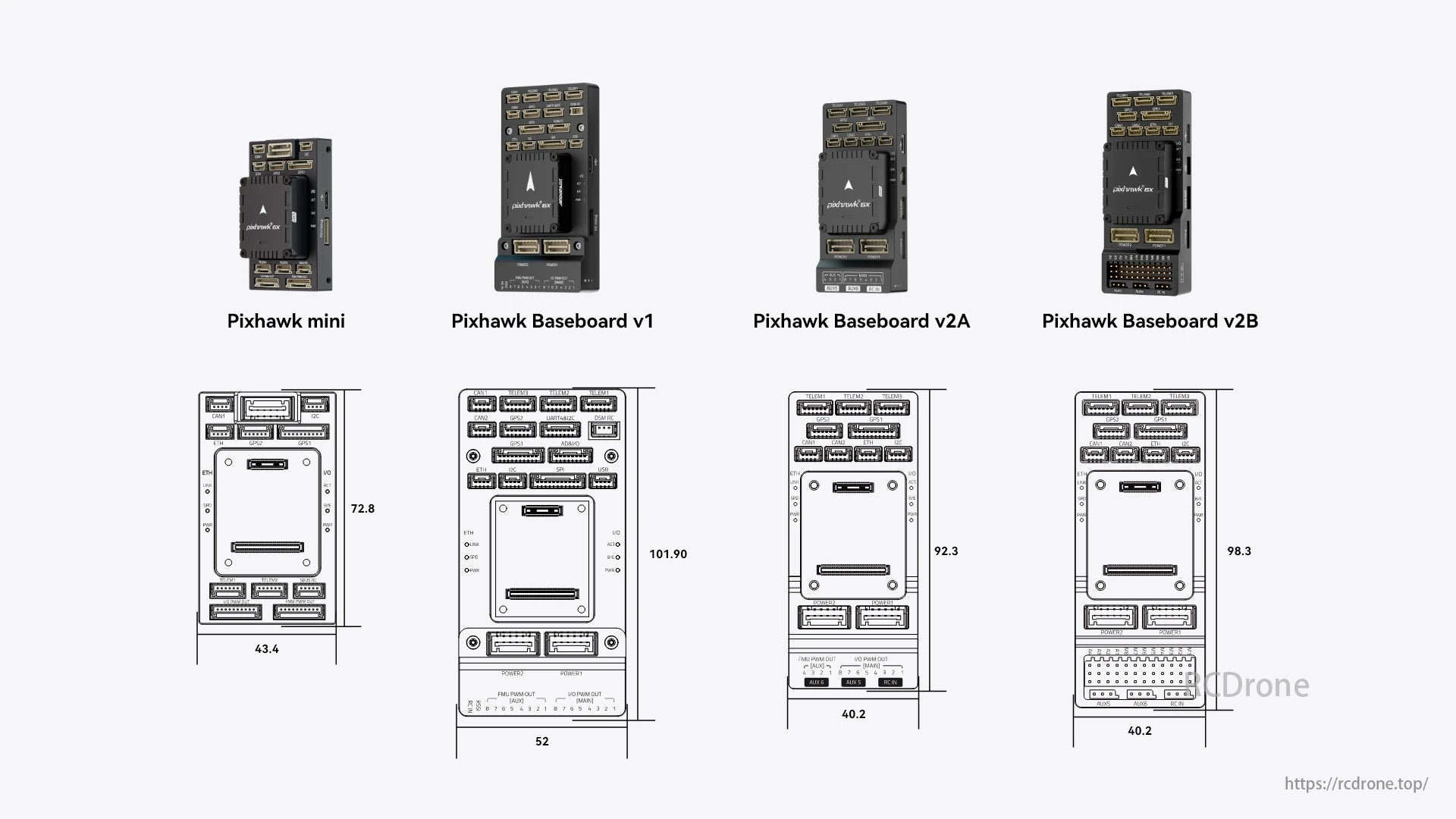
Controller di volo Pixhawk mini, Baseboard v1, v2A e v2B con dimensioni: 43.4x72.8, 52x101.90, 40.2x92.3 e 40.2x98.3 rispettivamente. Vari porti e connettori sono visibili su ciascun modello.
Related Collections