Controller di volo con pilota automatico Holybro Pixhawk 6X Pro
Controller di volo con pilota automatico Holybro Pixhawk 6X Pro
HolyBro
Impossibile caricare la disponibilità di ritiro
Punto chiave di progettazione
- IMU industriale ADIS16470 ad alte prestazioni con elevata gamma dinamica dell'accelerometro (±40 g), perfetto per rilevamento accurato del movimento in applicazioni UAV impegnative
- Nuovo materiale di isolamento dalle vibrazioni durevole e avanzato con frequenza di risonanza nello spettro più alto, ideale per applicazioni di droni industriali e commerciali
- Tripla IMU ridondante e doppio barometro ridondante su bus separati
- Processore STM32H753 ad alte prestazioni
- Controllore di volo modulare: IMU, FMU e sistema di base separati
- Il design orientato alla sicurezza incorpora sensori di diversi produttori e gamme di modelli
- LDO indipendente alimenta ogni sensore con controllo di potenza indipendente.
- Interfaccia Ethernet per l'integrazione ad alta velocità del computer di missione. È possibile ottenere un funzionamento senza trasformatore utilizzando resistori di terminazione da 50 Ohm sul dispositivo di destinazione (AN2190 Terminazione 50 Ohm).
- Scheda IMU a temperatura controllata, che consente una temperatura di lavoro ottimale delle IMU
- Modalità segnale 3,3 V o 5 V commutabile tramite hardware (richiede la modifica della scheda base)
Nota:
- Per il funzionamento di questo prodotto sono necessari il modulo FC + una scheda base. Un modulo FC o una scheda base da soli non funzioneranno.
Specificazione
Processori e sensori
- Processore FMU: STM32H753
- 32 bit Arm® Cortex®-M7, 480 MHz, memoria flash da 2 MB, RAM da 1 MB
- Processore IO: STM32F103
- Processore Arm® Cortex®-M3 a 32 bit, 72 MHz, SRAM da 64 KB
- Sensori di bordo
- Accel/Giroscopio: ADIS16470
- ±40g, Vibrazione isolata, IMU industriale
- Accel/Giroscopio: IIM-42652
- ±16g, Vibrazione isolata, IMU industriale
- Accel/Gyro: ICM-45686 con tecnologia BalancedGyro™
- ±32g, montato rigido
- Barometro: ICP20100
- Barometro: BMP388
- Rivista: BMM150
- Accel/Giroscopio: ADIS16470
- NXP Elemento di sicurezza hardware EdgeLock SE050 Plug & Trust
Dati elettrici
- Tensione nominale:
- Tensione massima di ingresso: 6V
- Ingresso alimentazione USB: 4,75~5,25 V
- Ingresso servo rail: 0~36V
- Valutazioni attuali:
- Limitatore di corrente di uscita Telem1: 1,5 A
- Limitatore di corrente di uscita combinato di tutte le altre porte: 1,5 A
- Temperatura di esercizio: -25-85°C
Dati meccanici
- Dimensioni
- Modulo del controllore di volo: 38,8 x 31,8 x 30,1 mm
- Base standard: 52,4 x 102 x 16,7 mm (Alluminio)
- Mini battiscopa: 43,4 x 72,8 x 14,2 mm
- Peso
- Modulo di controllo del volo: 50g
- Base standard: 72,5 g (Alluminio)
- Mini battiscopa: 26.5g
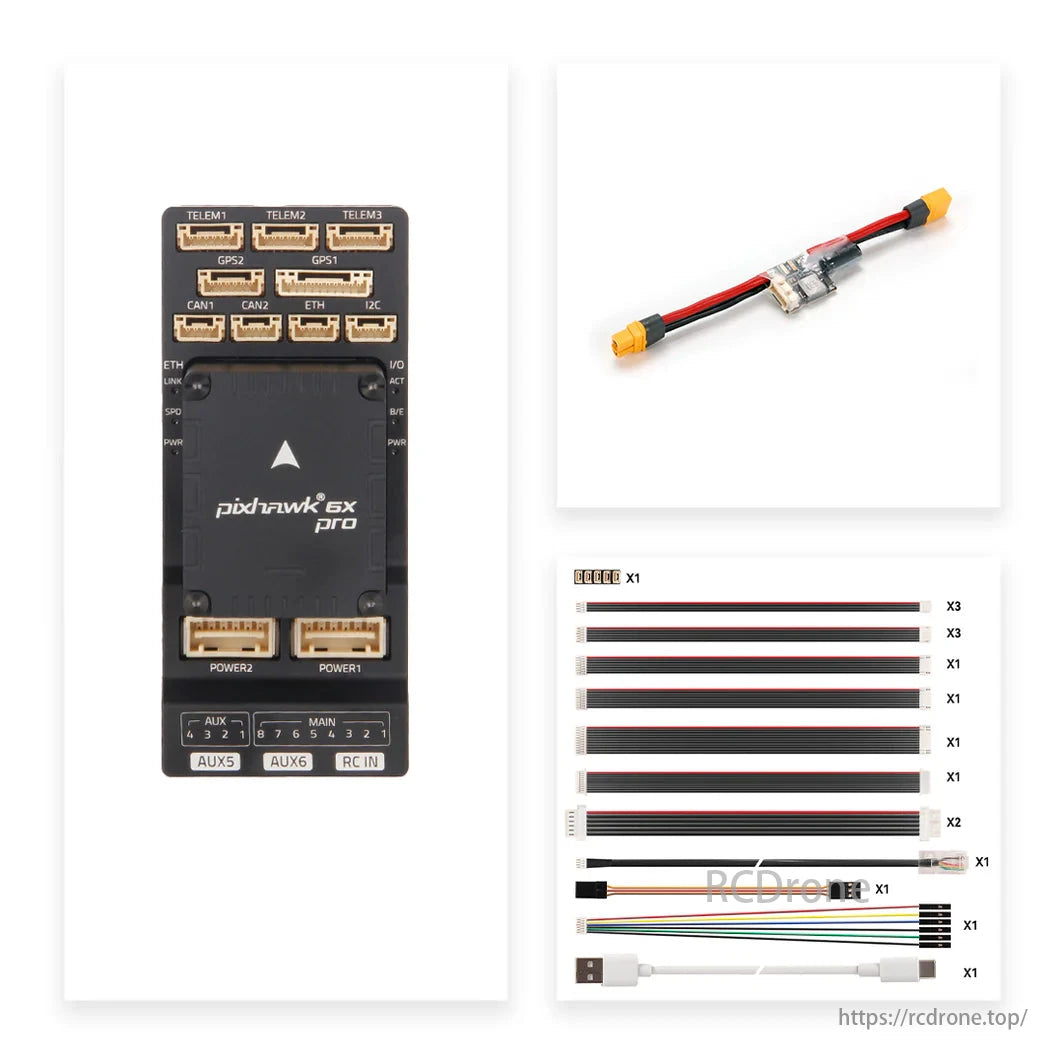
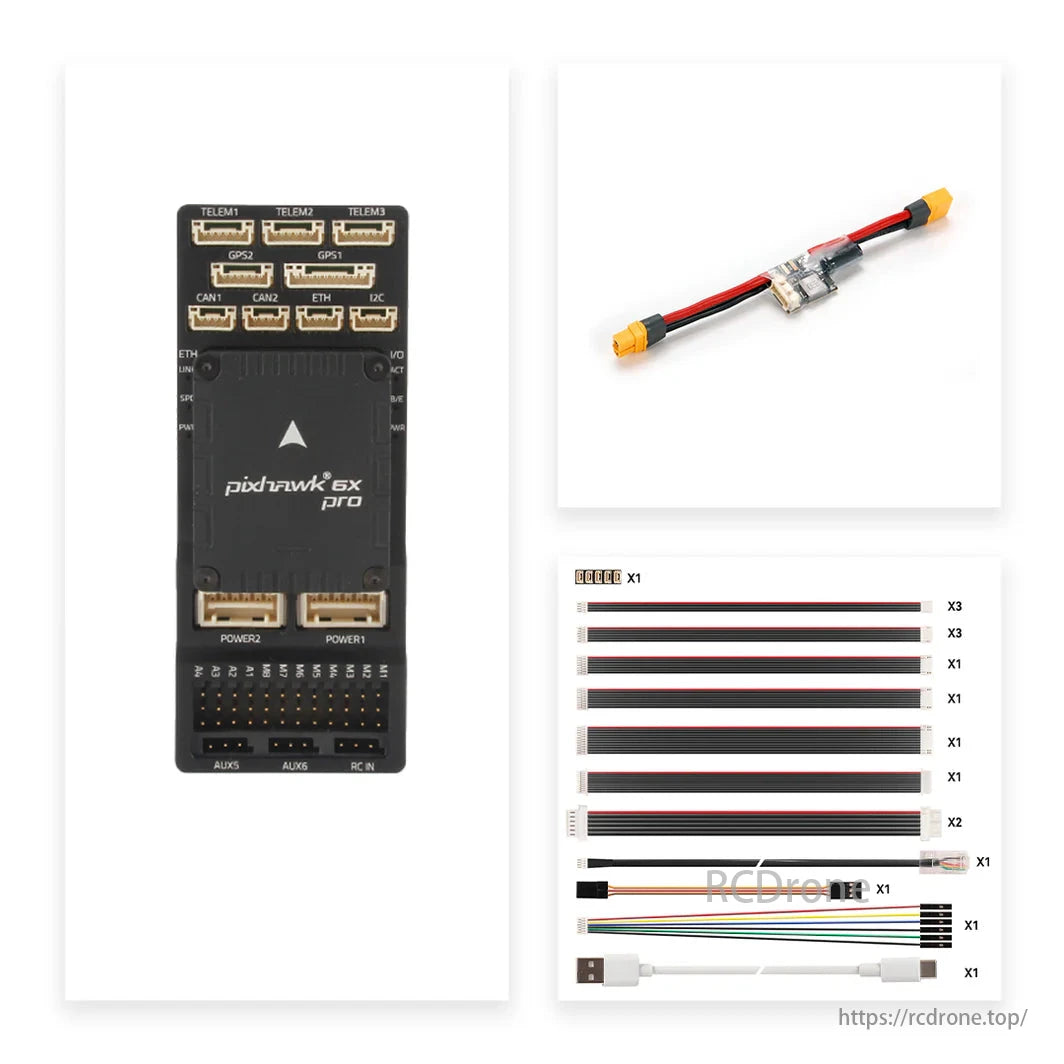
Il pacchetto include
Il modulo FC include solo:
- Pixhawk Modulo controller di volo 6X Pro
- Sostituzione opzionale dell'ammortizzazione IMU (più morbida di quella preinstallata)
Il set standard V2A/V2B/Mini include:
- Modulo controller di volo Pixhawk 6X Pro
- Basetta standard Pixhawk v2A/ Baseboard standard Pixhawk v2B/ Mini battiscopa
- Modulo di potenza PM02D HV
- Set di cavi
Dettagli
Nuovo design di isolamento dalle vibrazioni
Questo nuovo design di isolamento dalle vibrazioni utilizza acmateriale isolante a base di silicone durevole formulato su misura al posto del tradizionale design in schiuma. BGrazie a un'ampia attività di R&S e test, offre caratteristiche di smorzamento IMU ottimali con frequenza di risonanza nello spettro più alto, perfetto per droni industriali e commerciali.
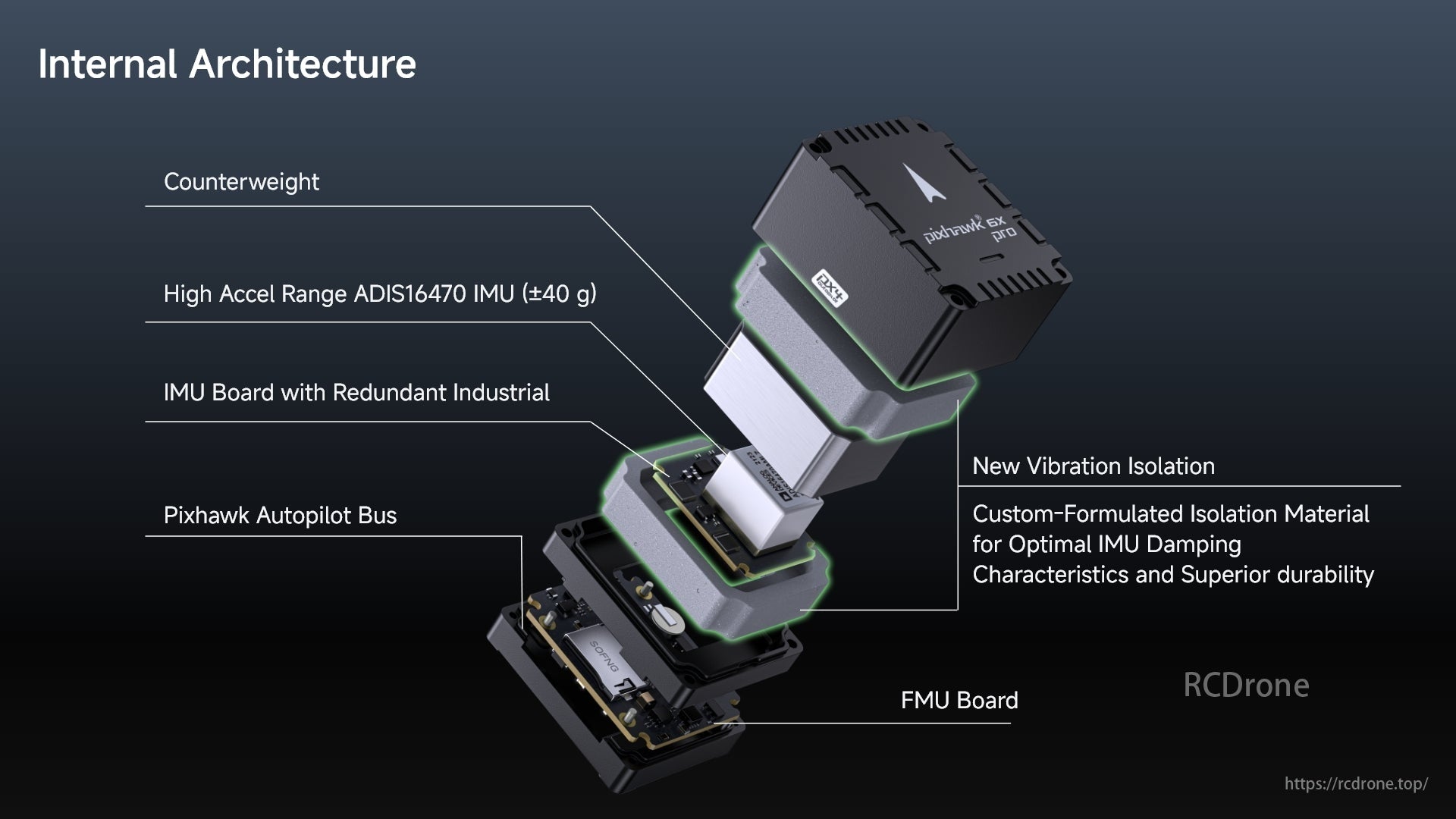
Architettura interna: contrappeso, IMU ADIS16470 ad alta accelerazione (±40 g), scheda IMU industriale ridondante, bus autopilota Pixhawk, nuovo isolamento dalle vibrazioni, scheda FMU.
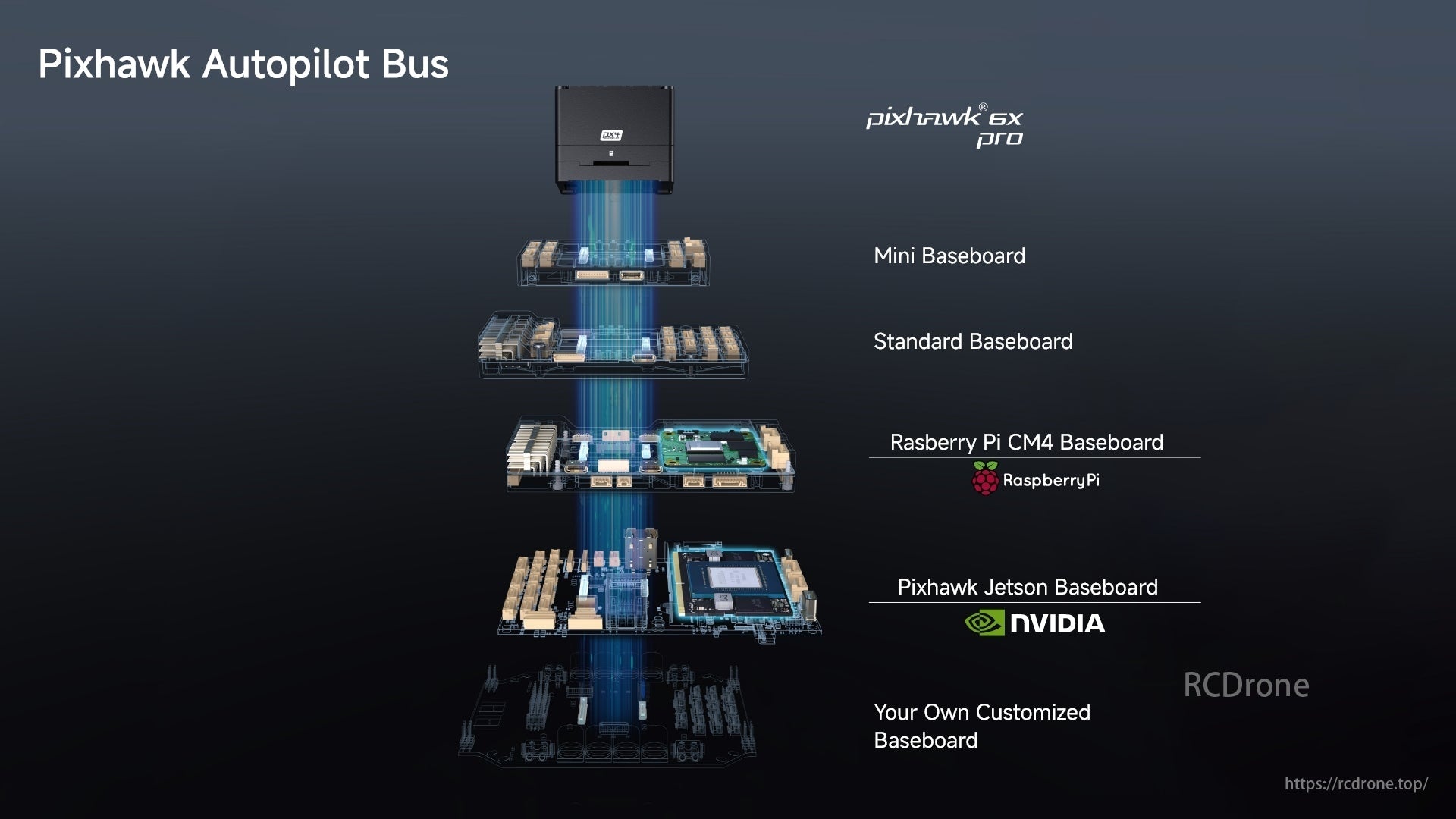
Pixhawk Autopilot Bus collega Mini, Standard, Raspberry Pi CM4, Jetson Baseboard e baseboard personalizzate.
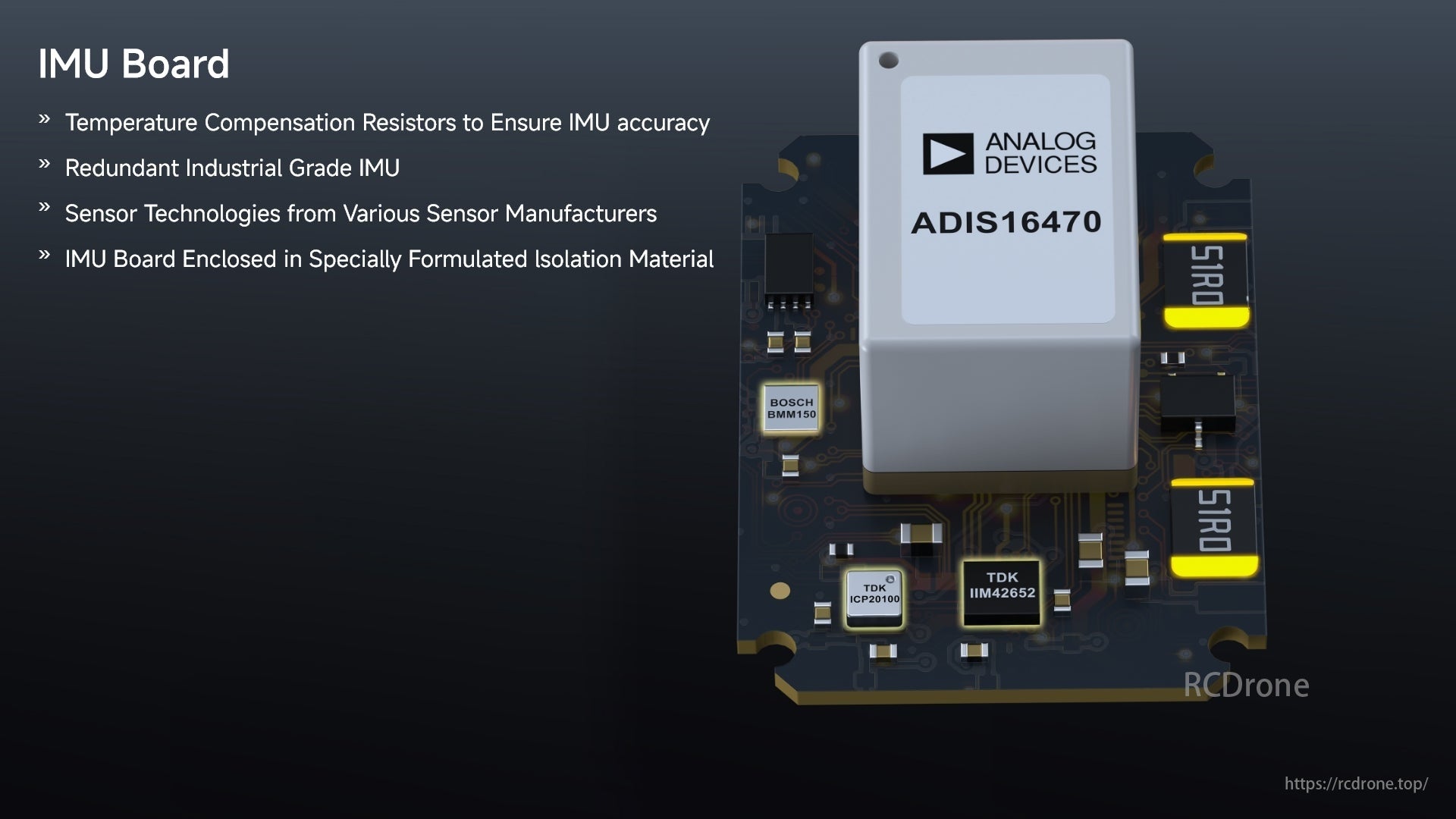
La scheda IMU è dotata di resistori di compensazione della temperatura, IMU ridondante di livello industriale, sensori di vari produttori ed è racchiusa in materiale isolante.
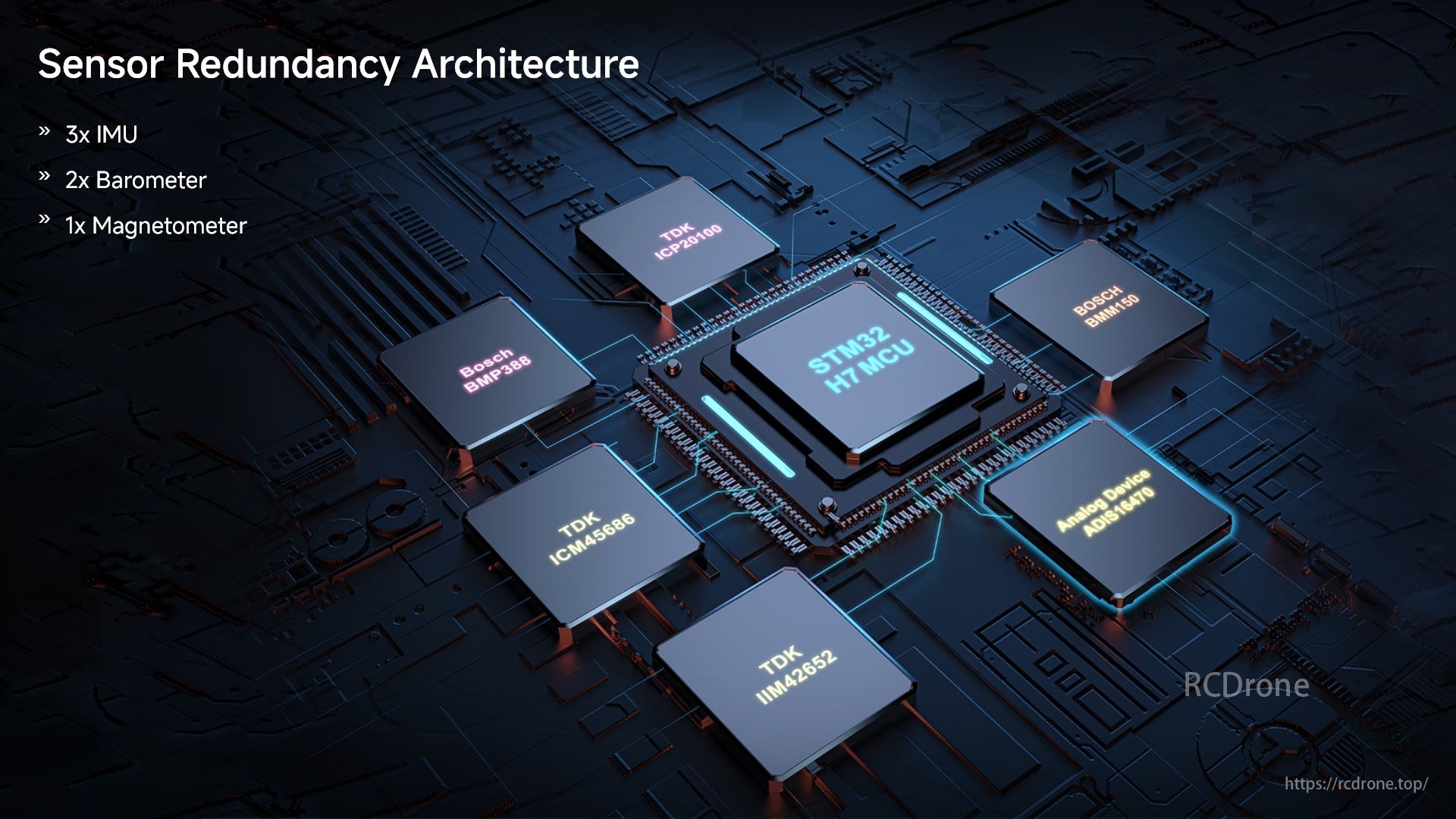
L'architettura di ridondanza del sensore comprende 3 IMU, 2 barometri e 1 magnetometro, con componenti quali STM32 H7 MCU, IC TDK, Bosch BMP388 e Analog Devices ADIS16470.
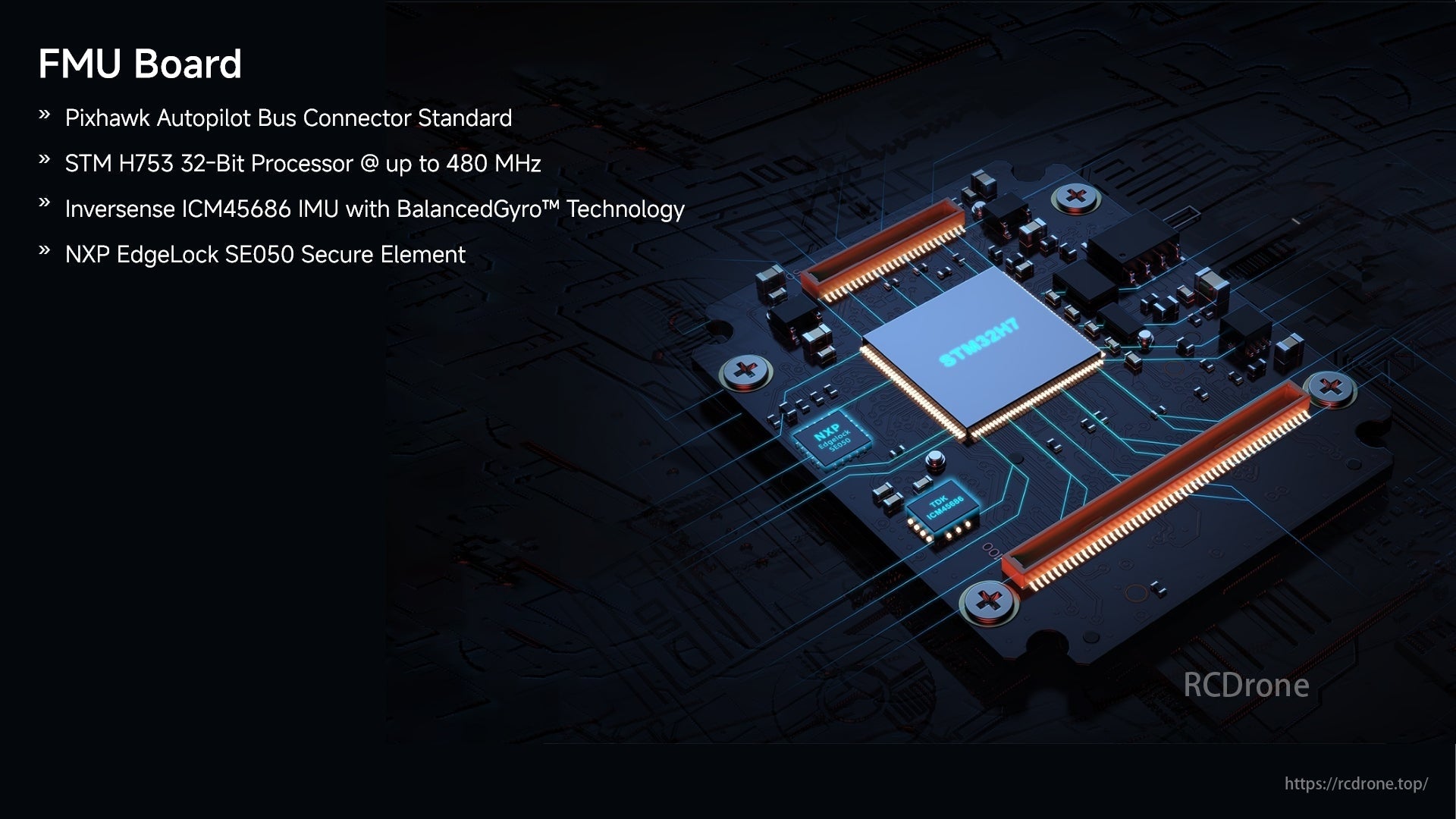
La scheda FMU è dotata di connettore bus standard Pixhawk Autopilot, processore STM H753 a 32 bit fino a 480 MHz, IMU Inversense ICM45686 con tecnologia BalancedGyro e elemento sicuro NXP EdgeLock SE050.
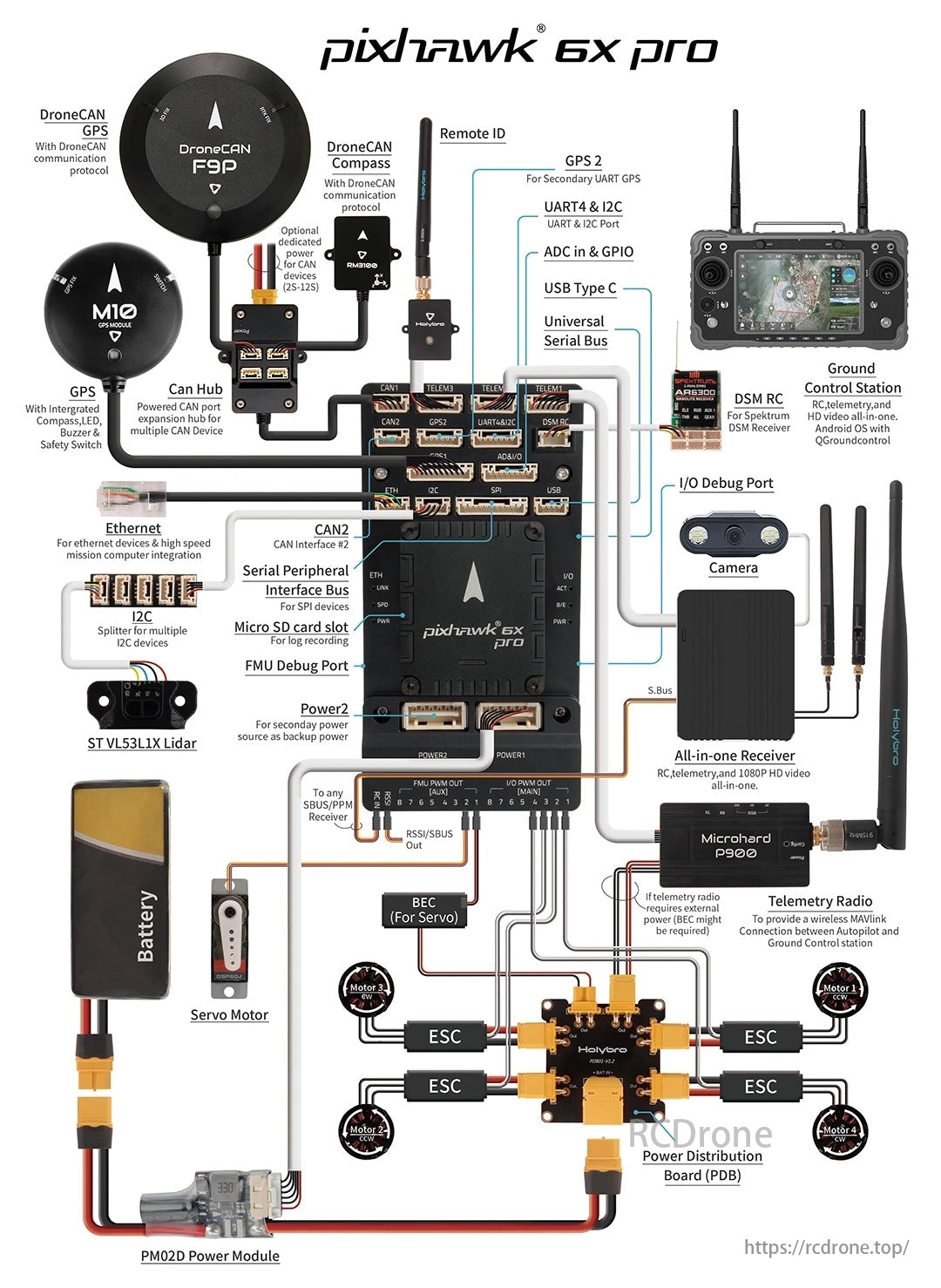
Lo schema Pixhawk 6X Pro illustra le connessioni per il sistema di pilotaggio automatico di un drone, inclusi moduli GPS, bussola, stazione di controllo a terra, telecamera, radio di telemetria, ESC, motori e scheda di distribuzione dell'alimentazione. Per la comunicazione tra i componenti vengono utilizzate varie interfacce come CAN, I2C, UART e USB.
Related Collections