Holybro Pixhawk 6X-RT - (Edizione per sviluppatori) Controller di volo con pilota automatico Standard/Mini set
Holybro Pixhawk 6X-RT - (Edizione per sviluppatori) Controller di volo con pilota automatico Standard/Mini set
HolyBro
Impossibile caricare la disponibilità di ritiro
Panoramica
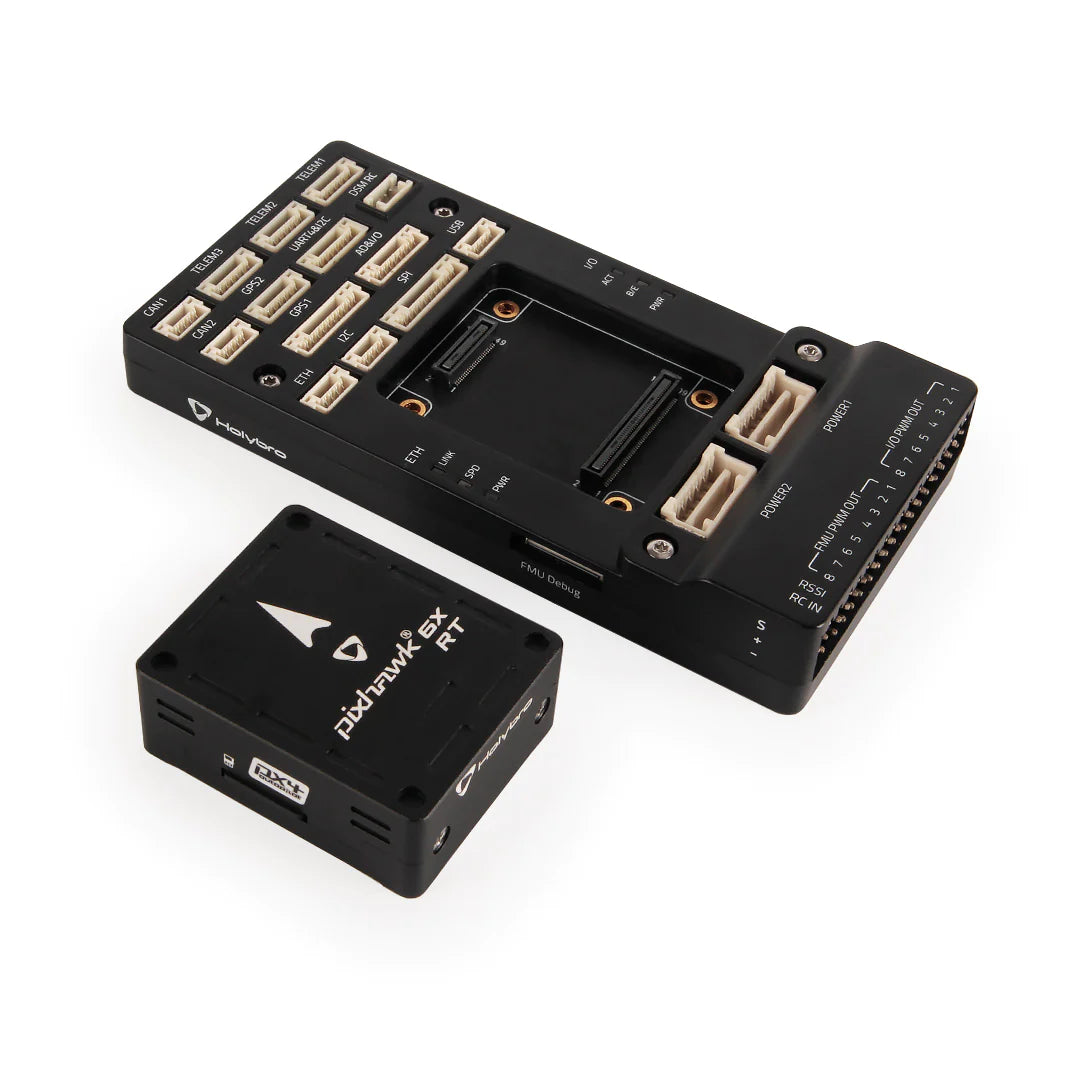
Pixhawk 6X-RT si basa sullo standard aperto Pixhawk® FMUv6X-RT e sullo standard del bus autopilota Pixhawk®. Viene fornito con PX4 Autopilot® preinstallato. All'interno del controller di volo Pixhawk 6X-RT, puoi trovare un i.L'MCU MXRT1176, abbinato alla tecnologia dei sensori Bosch® e InvenSense®, offre flessibilità e affidabilità per il controllo di qualsiasi veicolo autonomo.
L'i.Il microcontrollore MXRT1176 contiene un Arm® Cortex-M7 a 1 GHz e un Cortex-M4 a 400 MHz. Ha 2 MB di SRAM e 64 MB di Flash SPI ottale. Grazie alla potenza di elaborazione aggiornata, gli sviluppatori possono essere più produttivi ed efficienti nel loro lavoro di sviluppo, consentendo algoritmi e modelli complessi.
Include IMU ad alte prestazioni e a basso rumore progettate per una migliore stabilizzazione e dispone di triple IMU ridondanti e doppi barometri ridondanti su bus separati. Quando l'autopilota rileva un guasto del sensore, il sistema passa senza interruzioni a un altro per mantenere l'affidabilità del controllo di volo. Un LDO indipendente alimenta ogni set di sensori con controllo di potenza indipendente. Un sistema di isolamento dalle vibrazioni per filtrare le vibrazioni ad alta frequenza e ridurre il rumore per garantire letture accurate, consentendo ai veicoli di raggiungere migliori prestazioni di volo complessive. Ora è possibile un PHY Microchip Ethernet integrato e una comunicazione ad alta velocità con i computer di missione tramite Ethernet.
Il Pixhawk 6X-RT è perfetto per gli sviluppatori di laboratori di ricerca aziendali, startup, accademici (ricerca, professori, studenti) e applicazioni commerciali. Questo controller di volo è compatibile con qualsiasi baseboard che utilizza il bus Pixhawk Autopilot, come Pixhawk Baseboard, Pixhawk Mini Baseboard e Pixhawk RPi CM4 Baseboard.
Punti chiave della progettazione
- Dual core ad alte prestazioni i.Processore MXRT1176 con Cortex-M7 a 1 GHz – Cortex-M4 a 400 MHz
- Controllore di volo modulare: IMU, FMU e sistema base separati collegati da un connettore bus autopilota Pixhawk® a 100 pin e 50 pin.
- Ridondanza: 3 sensori IMU e 2 sensori barometrici su bus separati
- Domini a tripla ridondanza: domini di sensori completamente isolati con bus separati e controllo di alimentazione separato
- Sistema di isolamento dalle vibrazioni per filtrare le vibrazioni ad alta frequenza e ridurre il rumore per garantire letture accurate
- Interfaccia Ethernet per l'integrazione del computer di missione ad alta velocità
- Le IMU sono controllate dalla temperatura tramite resistori di riscaldamento integrati, consentendo una temperatura di funzionamento ottimale delle IMU
- Elemento di sicurezza hardware NXP EdgeLock SE051 un'estensione della famiglia di elementi di sicurezza Plug & Trust ampiamente affidabile EdgeLock SE050 Plug & Trust, supporta gli aggiornamenti dell'applet sul campo e fornisce sicurezza comprovata certificata CC EAL 6+, con AVA_VAN.5 fino al livello del sistema operativo, per una forte protezione contro gli scenari di attacco più recenti. Eg per archiviare in modo sicuro l'ID operatore
Nota:
- Questa edizione per sviluppatori è destinata ai primi utenti mentre continuiamo ad accumulare ore di test di volo
- Questo controller di volo è attualmente supportato solo nel Flight Stack PX4. (Destinazione firmware: FMUv6xrt). Non è supportato in Ardupilot.
- Questo controller di volo utilizza un modulo di alimentazione digitale (come Pixhawk 6X, l'elenco completo può essere trovato qui) Tabella comparativa dei moduli di alimentazione
Specifica
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400 MHz
-
2 MB di SRAM
-
Flash SPI ottale da 64 MB
-
Processore IO: STM32F103
-
Arm® Cortex®-M3 a 32 bit, 72 MHz, 64 KB SRAM
-
Sensori di bordo
-
Accel/Giroscopio: BMI088
-
Accelerazione/giroscopio: ICM-42670-P
-
Accelerazione/giroscopio: ICM-42686-P
-
Caricamento: BMM150
-
Barometro: 2x BMP388
- Elemento hardware sicuro
- NXP EdgeLock SE051C2
- Interfaccia SDHC
- PWM a 12 canali
- 8xUART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Abilitazione software open source
- Pilota automatico PX4
- NuttX RTOS
- Zephyr RTOS
SKU20257 Set standard/SKU258 Mini set include:
-
Modulo controllore di volo Pixhawk 6X-RT
-
Base standard Pixhawk/Base mini Pixhawk
- Modulo di potenza HV PM02D
-
Set di cavi
Link di riferimento:
- Istruzioni per l'aggiornamento del firmware (Github)
- PX4 sull'MCU NXP IMXRT1176 da 1 GHz - Diapositive di presentazione di NXP
- i.MX RT1176 – pagina del prodotto MCU crossover da 1 GHz con core Arm® Cortex®
- EdgeLock® SE051: soluzione di sicurezza IoT collaudata e facile da usare con supporto per aggiornabilità e applet personalizzate
Related Collections