Pacchetto baseboard Holybro Pixhawk Jetson con 6X / 6X Pro e NVIDIA Jetson
Pacchetto baseboard Holybro Pixhawk Jetson con 6X / 6X Pro e NVIDIA Jetson
HolyBro
Impossibile caricare la disponibilità di ritiro
Panoramica
IL Baseboard Holybro Pixhawk Jetson è progettato in base al Specifiche open source del Pixhawk Autopilot Bus (PAB) e si integra perfettamente con il Scheda portante NVIDIA Jetson Orin NX/Nano. IL Fattore di forma PAB consente la compatibilità con qualsiasi controllore di volo PAB, incluso il Pixhawk 6XQuesta scheda combina la potenza di calcolo di NVIDIA Jetson con le capacità di controllo del volo di Pixhawk, rendendolo ideale per applicazioni autonome avanzate.
Caratteristiche principali
-
Sistema unificato: Combina Pixhawk E NVIDIA Jetson in un'unica tavola.
-
Connettività senza interruzioni: Jetson e Pixhawk comunicano tramite Switch UART, CAN ed Ethernet.
-
Ampia compatibilità: Supporti Jetson Orin NX e Orin Nano.
-
Espansione ad alta velocità: Caratteristiche 2x slot per chiave M.2 per WiFi/Bluetooth e SSD NVMe.
-
Integrazione Pixhawk 6X: Dotato di Sensori ICM-45686 per un migliore controllo del volo.
Processori e sensori
Processore FMU:
-
STM32H753
-
ARM Cortex-M7 a 32 bit, 480 MHz
-
Memoria flash da 2 MB, RAM da 1 MB
Processore IO:
-
STM32F103
-
ARM Cortex-M3 a 32 bit, 72 MHz
-
Memoria RAM da 64 KB
Sensori di bordo (Rev8)
-
Accelerometro/Giroscopio: 3x Codice ICM-45686 (con tecnologia BalancedGyro™)
-
Barometro: ICP20100 e BMP388
-
Magnetometro: Modello BMM150
Porte e connettività della baseboard
Connettori Jetson
-
2 porte Gigabit Ethernet (Connesso a Jetson e Autopilot tramite Interruttore Ethernet RTL8367S)
-
2 ingressi telecamera MIPI CSI (4 corsie ciascuna, Raspberry Pi Cam FFC a 22 pin)
-
2 porte host USB 3.0 (USB-A, limite di corrente 5A)
-
2 porte USB 2.0 porte host (JST-GH a 5 pin)
-
USB 2.0 per il debug (USB-C)
-
Uscita Mini HDMI
-
2x slot M.2:
-
Chiave M (2242) per SSD NVMe (PCIEx4)
-
Chiave E (2230) per WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
Porta CAN (Collegato a Pilota automatico CAN2, JST-GH a 4 pin)
-
Porte SPI, I2C, I2S, UART (Vari connettori JST-GH)
-
Porta di alimentazione della ventola
-
Potenza in ingresso: Connettore XT30, 7-21 V (3S-4S)
-
UBEC 12A (3-14S) Consigliato per applicazioni >4S
Connettori autopilota
-
Interfaccia bus autopilota Pixhawk: Hirose DF40 a 100 pin e 50 pin
-
Ingressi ridondanti del modulo di potenza digitale
-
Supporto per monitor di potenza I2C
-
Porte GPS e interruttore di sicurezza: JST-GH a 10 pin e 6 pin
-
2 porte CAN (JST-GH a 4 pin)
-
3 porte di telemetria (JST-GH, una collegata a UART1 di Jetson)
-
16 uscite PWM (2x 10 pin JST-GH)
-
USB 2.0 (USB-C e JST-GH a 4 pin)
-
Ingresso DSM (JST-ZH a 3 pin, passo 1,5 mm)
-
Ingresso RC (PPM/SBUS, 5 pin JST-GH)
-
Porta SPI per bus sensore esterno (SPI5, 11 pin JST-GH)
-
2 porte di debug (FMU e IO, JST-SH a 10 pin)
Requisiti di potenza
-
Tensione di ingresso: 7-21 V (3S-4S) tramite connettore XT30
-
Requisiti minimi di potenza: 8V/3A (varia in base alle periferiche)
-
Supporta UBEC esterno 12A (3-14S) per ridondanza e applicazioni ad alta tensione
-
Protezione da sovratensione integrata
Dimensioni e peso
-
Dimensioni della scheda: Dimensioni: 126 x 80 x 38 mm (senza Jetson e Flight Controller)
-
Peso: 203.2g (Inclusi Jetson, dissipatore di calore, controller di volo, SSD, modulo Wi-Fi)
Specifiche UBEC-12A
-
Tensione di ingresso: 3~14S (XT30)
-
Tensione di uscita: 6,0 V/7,2 V/8,0 V/9,2 V (7,2 V consigliato per Jetson)
-
Corrente di uscita continua: 12A
-
Corrente di uscita a raffica: 24A
-
Misurare: Dimensioni: 48 x 33,6 x 16,3 mm
-
Peso: 47,8 g
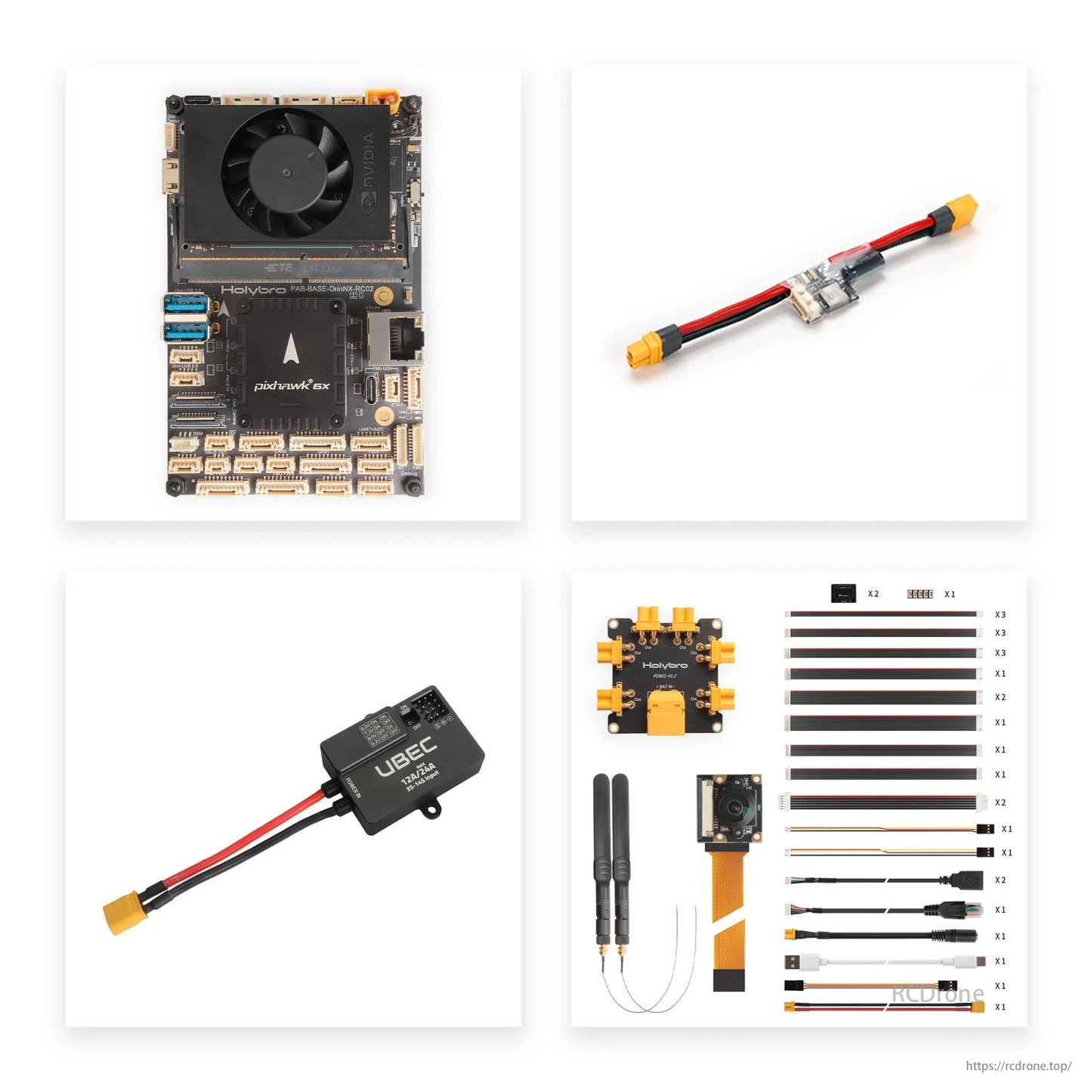
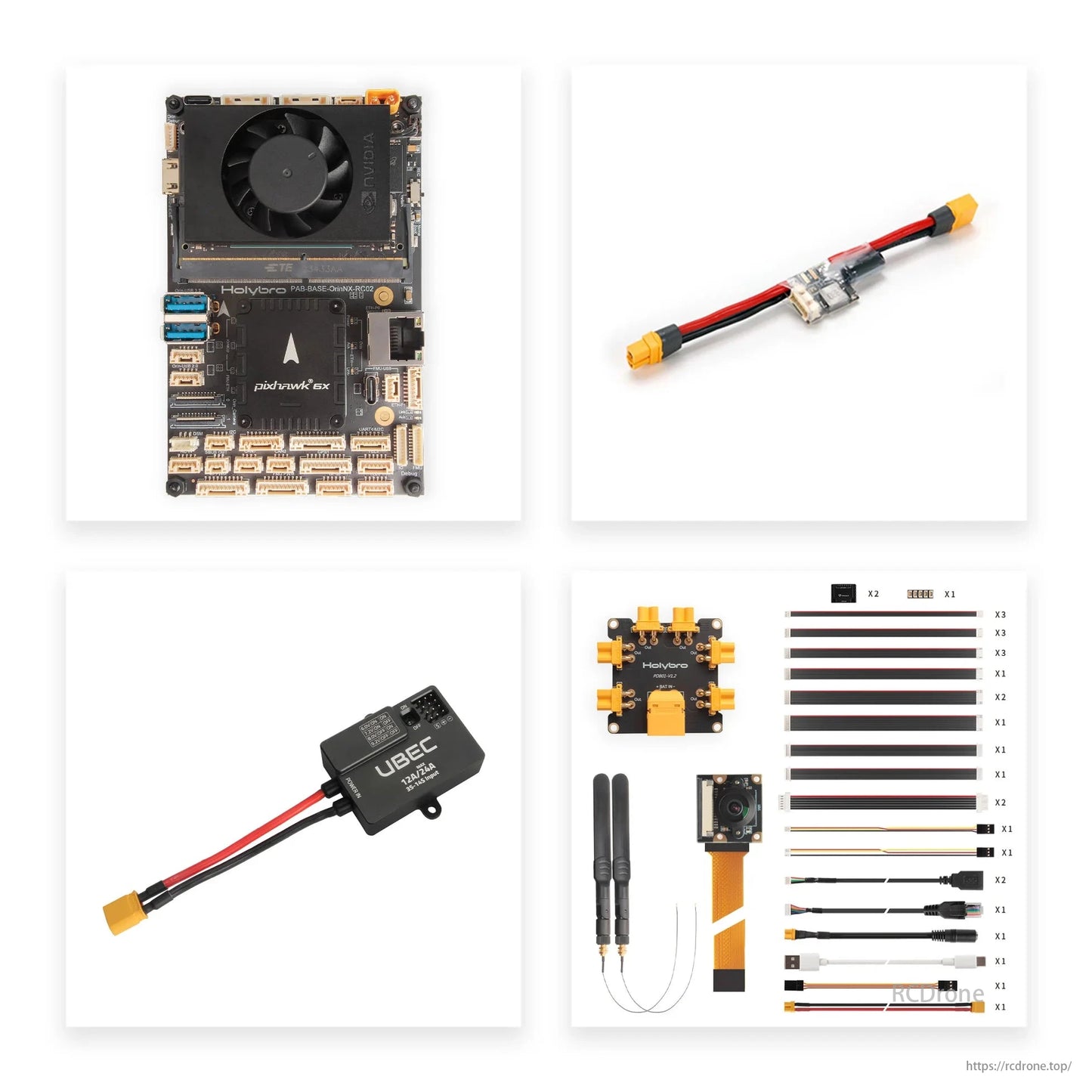
Contenuto della confezione
Pacchetto Pixhawk 6X
-
Modulo di controllo di volo Pixhawk 6X (ICM-45686)
-
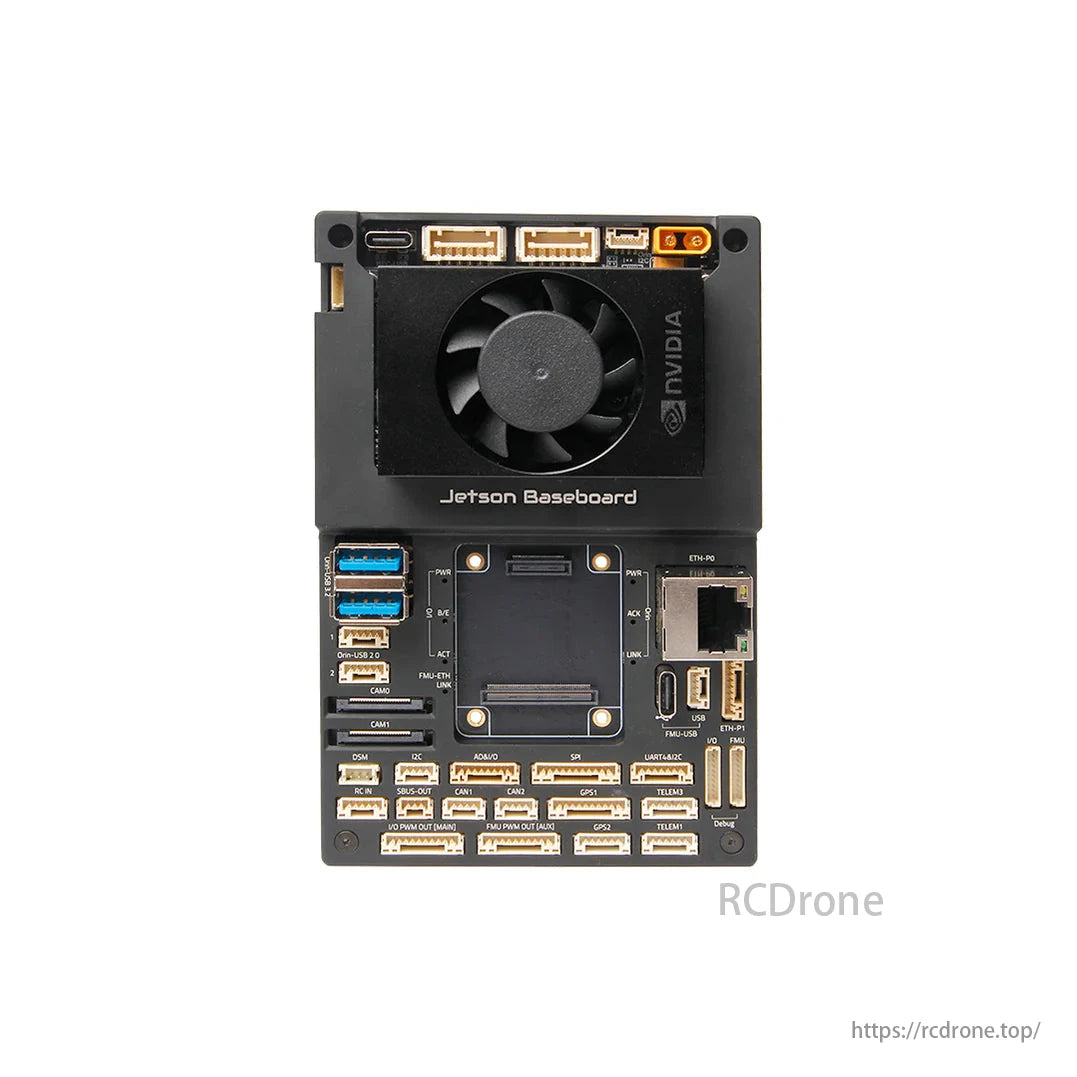
Battiscopa Pixhawk Jetson Orin
-
Nvidia Orin NX (16 GB di RAM) / Orin Nano (4 GB di RAM) con dissipatore di calore e ventola
-
SSD: Modello: PM9B1 Interfaccia PCIe 4.0 NVMe 512 GB
-
Modulo Wi-Fi e Bluetooth: Intel 8265NGW Doppia banda CA / Realtek RTL8B22CE
-
Telecamera: Modello IMX219-200
-
Modulo di potenza PM02D
-
UBEC 12A (3-14 anni)
-
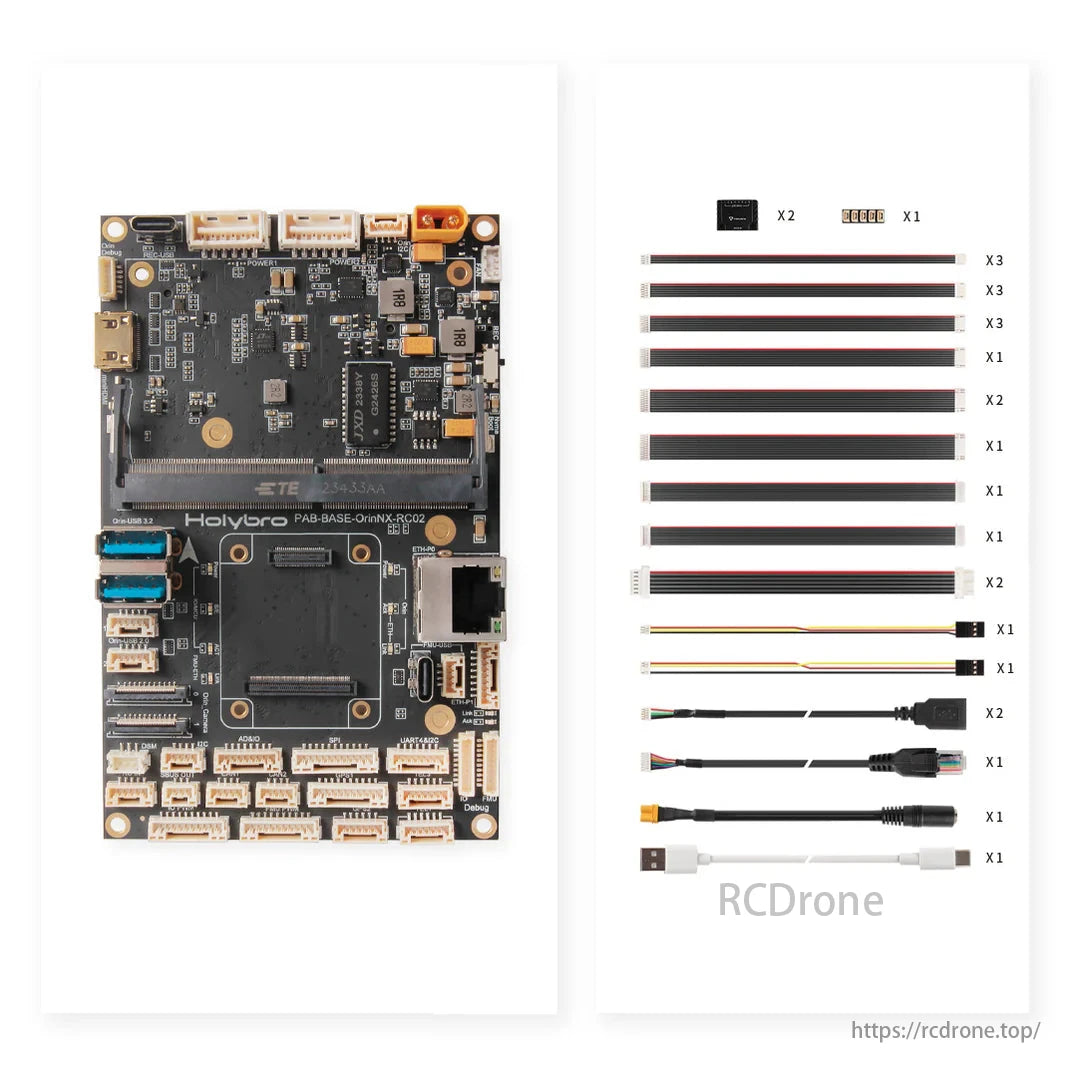
Set di cavi e schede PDB
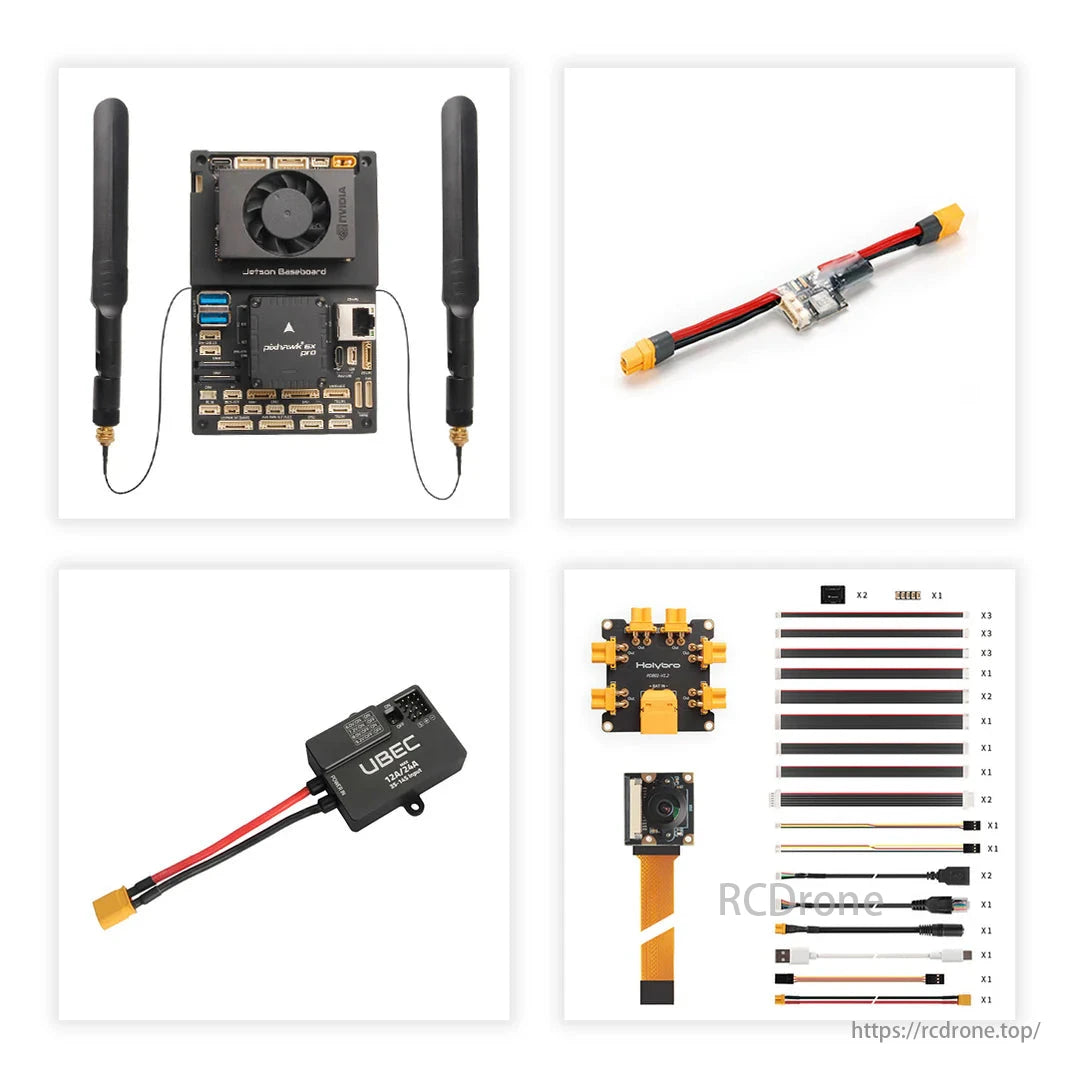
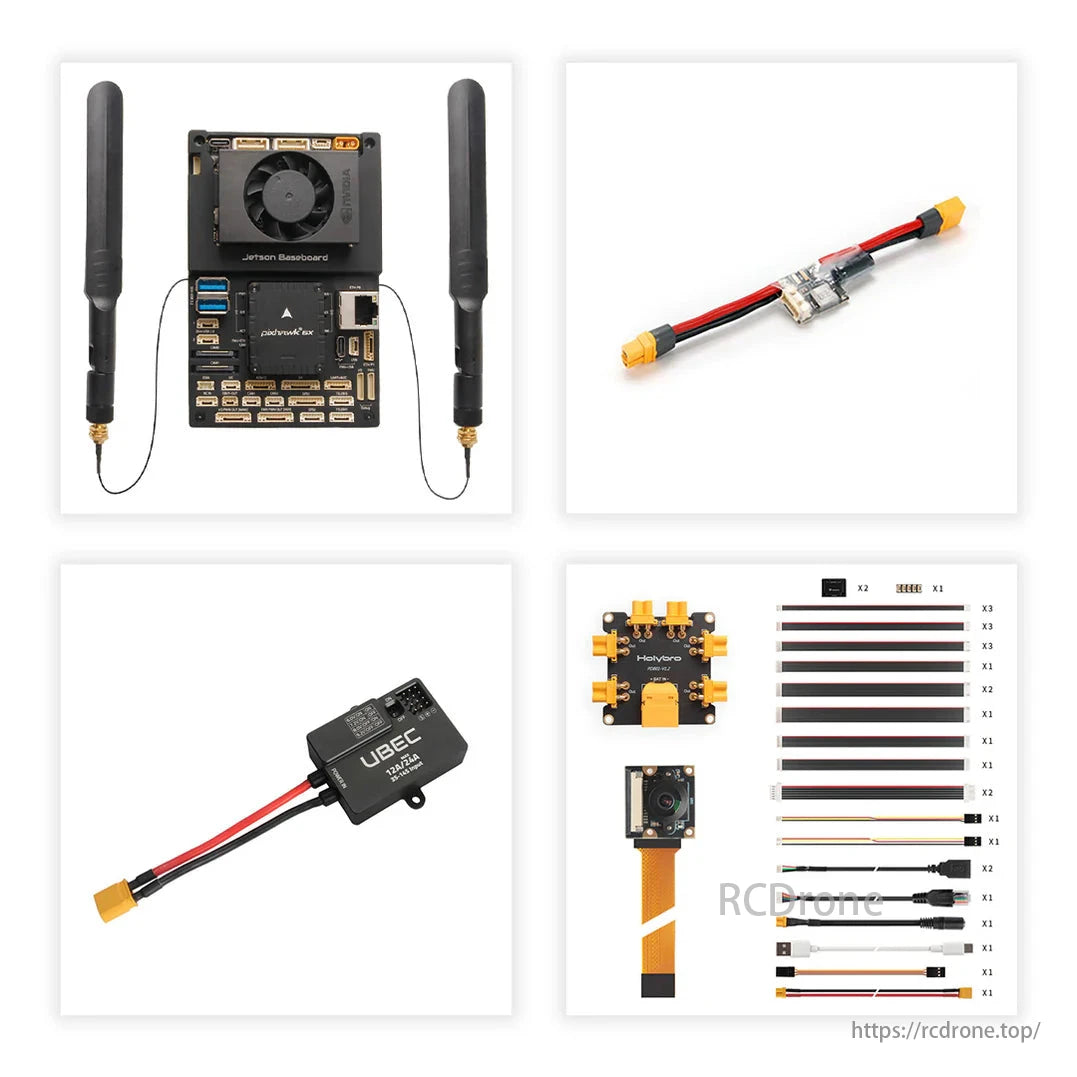
Pacchetto Pixhawk 6X Pro
-
Modulo controller di volo Pixhawk 6X Pro
-
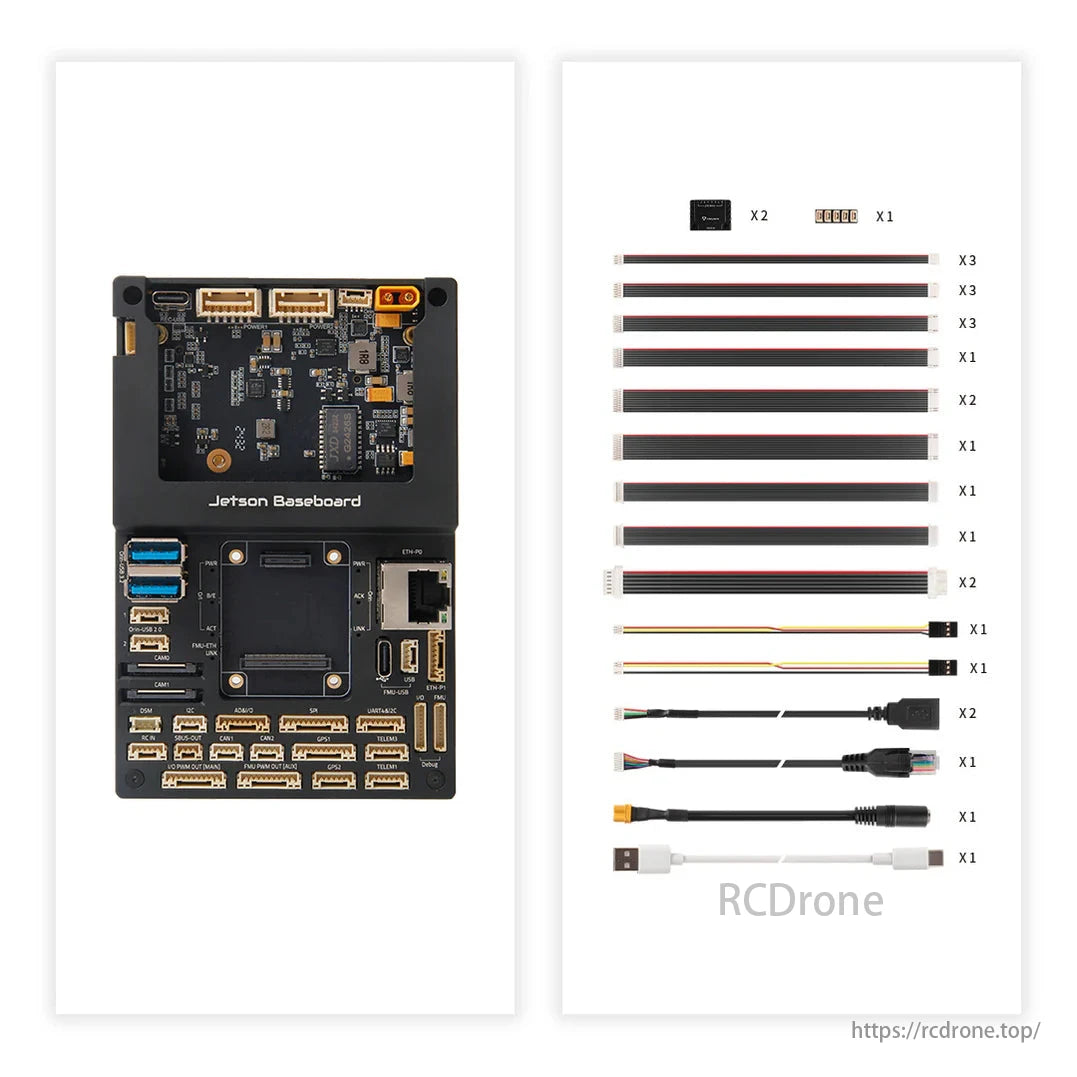
Baseboard Pixhawk Jetson Orin (con o senza custodia)
-
Nvidia Orin NX (16 GB di RAM) / Orin Nano (4 GB di RAM) con dissipatore di calore e ventola
-
SSD, modulo Wi-Fi/Bluetooth, fotocamera, modulo di alimentazione PM02D, UBEC 12A, scheda PDB, set di cavi
Solo battiscopa Jetson
-
Baseboard Pixhawk Jetson Orin (con o senza custodia)
-
Set di cavi
Link di riferimento
Credenziali di accesso predefinite per Jetson Orin:
-
ID:
santo fratello -
Password:
123
Dettagli




Pixhawk e Nvidia Jetson combinati in un'unica scheda.

Nvidia Jetson connesso tramite UART CAN e switch Ethernet utilizzando il connettore RJ45 per sistemi di pilota automatico
Specifiche Open Source del Pixhawk Autopilot Bus (PAB)

Sistema di connettori Jetson SoDIMM completamente compatibile: Jetson Orin NX/Nano

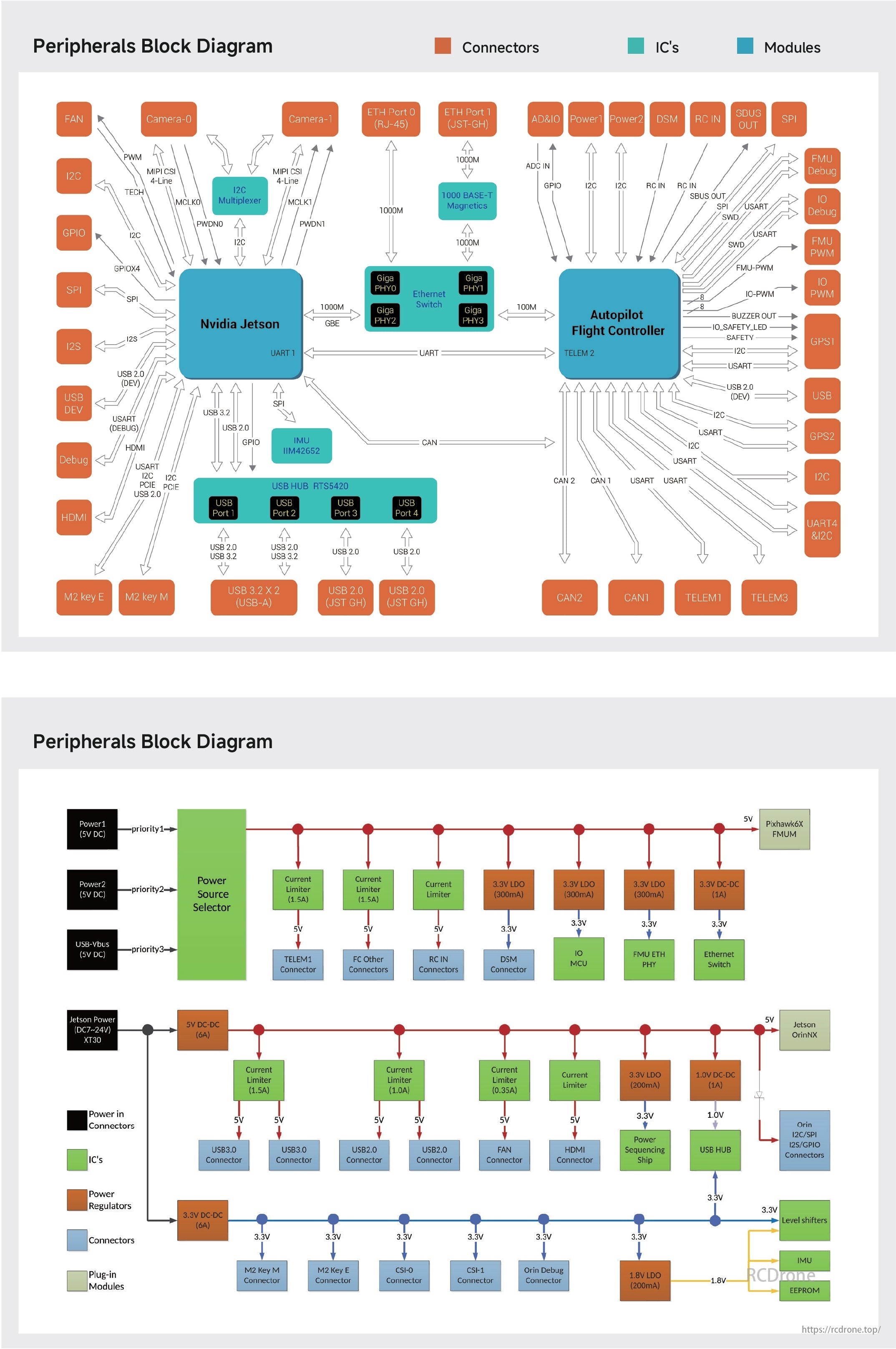
L'immagine raffigura un diagramma a blocchi delle periferiche per un sistema embedded, con componenti come Nvidia Jetson e Autopilot Flight Controller. Include vari connettori, IC e moduli come porte USB, switch Ethernet e regolatori di potenza, illustrandone le interconnessioni e il flusso di dati.
Schema elettrico di riferimento

Due diagrammi illustrano i sistemi di distribuzione dell'alimentazione per un modulo Jetson che utilizza una batteria. Il diagramma di sinistra utilizza un PM02D Power Module e una Power Distribution Board, mentre il diagramma di destra include un UBEC esterno per batterie superiori a 4S.Entrambe le configurazioni garantiscono una corretta regolazione della tensione per Jetson e Pixhawk Power.
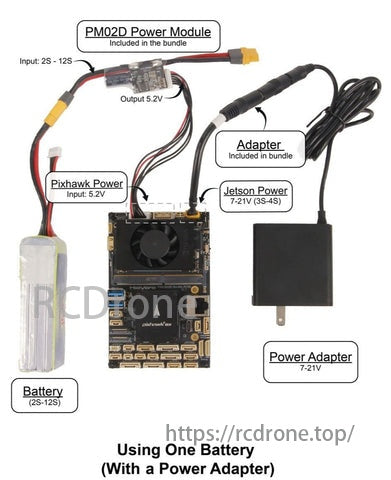
Il modulo di alimentazione PM02D collega la batteria a Pixhawk e Jetson, utilizzando una batteria con un adattatore di alimentazione per un ingresso da 7 a 21 V.
Related Collections