


Mano robotica Inspire Robots RH56DFTP – 6 DOF, presa 30N, sensori tattili & di forza, controllo ModbusTCP+CAN
Mano robotica Inspire Robots RH56DFTP – 6 DOF, presa 30N, sensori tattili & di forza, controllo ModbusTCP+CAN
Inspire Robots
Impossibile caricare la disponibilità di ritiro
Panoramica
La Inspire Robots RH56DFTP Mano Bionica Intelligente è una mano bionica ad alta precisione, a cinque dita, progettata per applicazioni robotiche avanzate. Dotata di 6 gradi di libertà, 12 giunti, e una combinazione di 6 sensori di forza e 17 sensori tattili, offre destrezza e percezione tattile simili a quelle umane. Con una forza di punta di 30N (≈3 kg per dito), movimento angolare ad alta velocità e comunicazione senza soluzione di continuità ModbusTCP+CAN (RS485), questa mano è ideale per la ricerca, l'automazione industriale e la robotica bionica.
Caratteristiche principali
-
Precisione tattile simile a quella umana: I sensori tattili integrati offrono percezione in tempo reale per una manipolazione accurata degli oggetti.
-
Presenza forte e stabile: Ogni dito fornisce fino a 3 kg di forza di attuazione, consentendo una presa affidabile di vari oggetti.
-
Auto-bloccaggio in caso di perdita di alimentazione: Mantiene la posizione quando è spento, eliminando la necessità di ripristinare lo zero all'avvio.
-
Funzionamento ad alta velocità: Il movimento del pollice supera 130°/s, mentre il movimento delle quattro dita raggiunge 200°/s per un controllo reattivo.
-
Duraturo e affidabile: Progettato per un uso a lungo termine in laboratori di ricerca, piattaforme robotiche e ambienti industriali.
Specifiche
| Parametro | Valore |
|---|---|
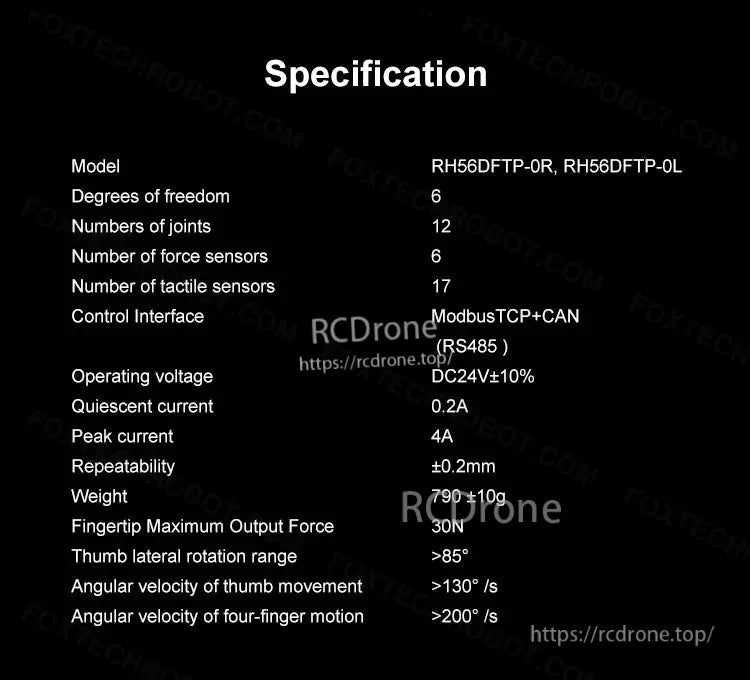
| Modello | RH56DFTP-0R, RH56DFTP-0L |
| Gradi di libertà | 6 |
| Numero di giunti | 12 |
| Sensori di forza | 6 |
| Sensori tattili | 17 |
| Interfaccia di controllo | ModbusTCP + CAN (RS485) |
| Tensione di funzionamento | DC 24V ±10% |
| Corrente di quiescenza | 0.2A |
| Corrente di picco | 4A |
| Ripetibilità | ±0.2mm |
| Peso | 790g ±10g |
| Forza massima di uscita al polpastrello | 30N (≈3 kg) |
| Gamma di rotazione laterale del pollice | >85° |
| Velocità angolare – pollice | >130°/s |
| Velocità angolare – quattro dita | >200°/s |
Applicazioni
-
Ricerca e Sviluppo: Ricerca avanzata in robotica presso università e laboratori.
-
Automazione Industriale: Compiti di assemblaggio e manipolazione ad alta precisione.
-
Soluzioni Bioniche: Studi su mani protesiche e robotica umanoide.
-
AI e Apprendimento Automatico: Progetti di rilevamento tattile e manipolazione che richiedono feedback accurato in tempo reale.
Caratteristiche
Il RH56DFTP eccelle in compiti che richiedono controllo preciso della forza e operazioni delicate, come la raccolta di mirtilli, pomodorini o uva senza causare danni. Gestisce anche la presa ad alta forza per applicazioni industriali robuste, rendendolo una soluzione versatile per compiti di manipolazione complessi.
Dettagli
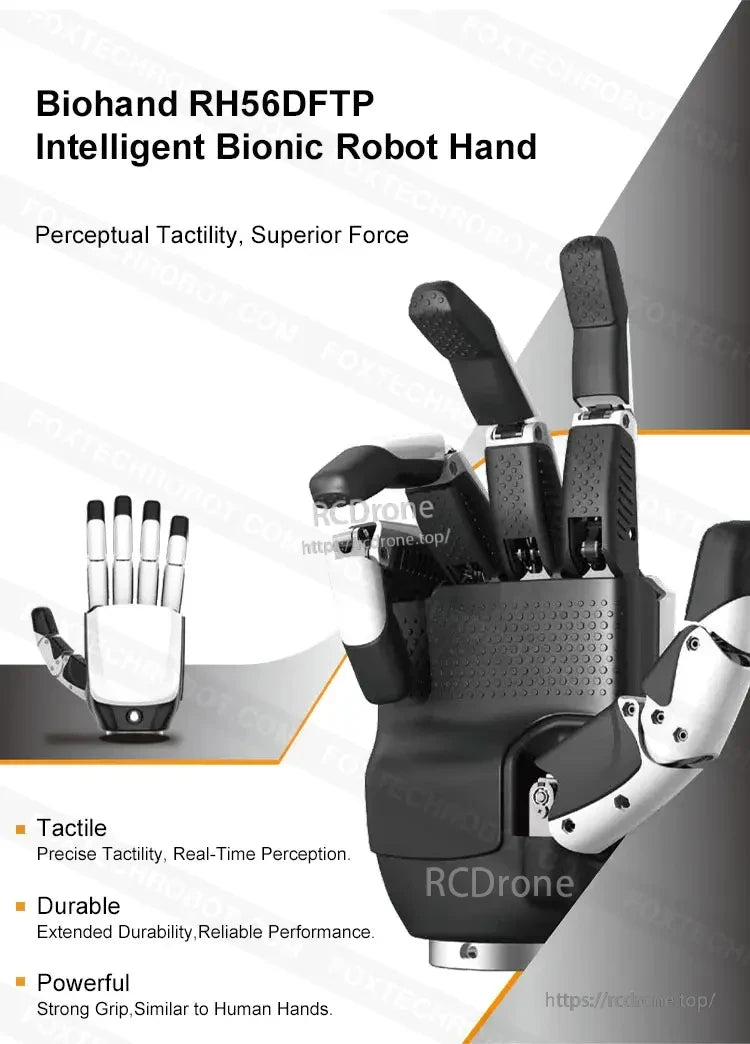
La mano robotica bionica intelligente Biohand RHS6DFTP offre tattilità percettiva, forza superiore e tattilità precisa in tempo reale, con una durata estesa e durevole per prestazioni affidabili e una presa potente simile a quella delle mani umane.

Mano robotica con sei gradi di libertà, progettata per precisione e destrezza, perfetta per varie applicazioni come chirurgia, assemblaggio o lavoro di laboratorio.

Presa potente, prestazioni simili a quelle umane. Forza di attuazione di 3 kg per dito. Mano robotica abile con design avanzato e ingegneria di precisione.


Il meccanismo di auto-blocco per perdita di potenza mantiene la posizione stabile e affidabile senza necessità di ripristino all'avvio o allo spegnimento.


Strumento multifunzionale con sensore di forza, adatto per raccogliere e pizzicare piccoli frutti come mirtilli, pomodorini e uva.

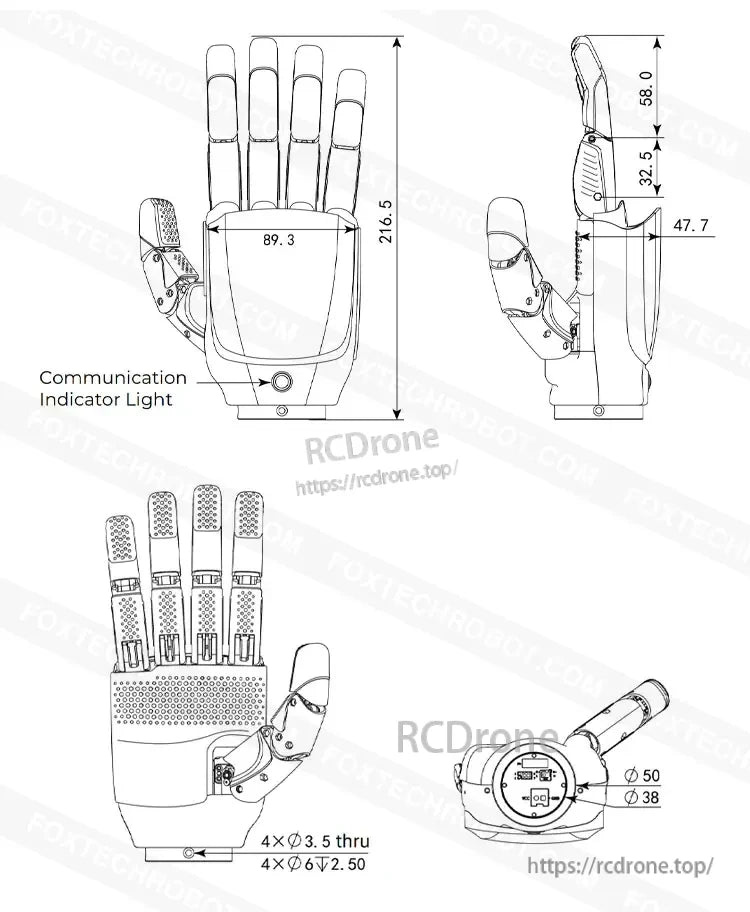
Indicatore di comunicazione, 8 x 47,7 mm, lungo 89 mm, senza LED, 5x5: 38-4x03.5 a 4xp6v2, 50 ohm, 2 strati
Il modello di specifica RHS6DFTP-OR e RHS6DFTP-OL presenta 3 gradi di libertà, 12 giunti e 17 sensori di forza e sensori tattili. Utilizza un'interfaccia di controllo Modbus TCP+CAN (RS485) con una tensione di funzionamento di DC24V +10%.



Related Collections


