

JUXIE INTELLIGENT Serie CE-HM-R68, 48 V 175 W, 51:1/101:1, 17/33 Nm, Motore robotico per giunti con doppio encoder a 19 bit
JUXIE INTELLIGENT Serie CE-HM-R68, 48 V 175 W, 51:1/101:1, 17/33 Nm, Motore robotico per giunti con doppio encoder a 19 bit
JUXIE INTELLIGENT
Impossibile caricare la disponibilità di ritiro
Panoramica
La serie JUXIE INTELLIGENT CE-HM-R68 è un modulo motore e giunto robotico compatto progettato per robotica umanoide e mobile. Integra un servomotore da 48 V, doppi encoder e rapporti di trasmissione di 51:1 o 101:1 per fornire una coppia nominale fino a 33 Nm e una coppia di picco fino a 82 Nm per giunti robotici.
Caratteristiche principali
- Due configurazioni: rapporti di trasmissione 51:1 e 101:1
- Velocità di uscita nominale: 60 RPM (51:1), 30 RPM (101:1)
- Coppia nominale: 17 Nm (51:1), 33 Nm (101:1); coppia di picco fino a 41/82 Nm
- Basso gioco: 15 arcsec
- Servomotore da 48 V, 175 W con velocità nominale del motore di 3000 RPM
- Doppi encoder con risoluzione assoluta a 19 bit a giro singolo
- Interfacce: EtherCAT/CAN; anelli di controllo: corrente 50 kHz, velocità 10 kHz
- Dimensioni compatte R68 x 66,3 mm; peso 0.8 kg
- Adatto per giunti di spalla, gomito, ginocchio e vita di robot umanoidi
Specifiche
| Parametro | 51:1 | 101:1 |
|---|---|---|
| Velocità di uscita (RPM) | 60 | 30 |
| Momento torcentale nominale (Nm) | 17 | 33 |
| Momento torcentale di picco (Nm) | 41 | 82 |
| Gioco (arcsec) | 15 | 15 |
| Voltaggio nominale (V) | 48 | 48 |
| Potenza nominale (W) | 175 | 175 |
| Velocità nominale del motore (RPM) | 3000 | 3000 |
| Corrente nominale (A) | 5.5 | 5.5 |
| Corrente di picco (A) | 16 | 16 |
| Encoder | Encoder doppi; assoluto a singolo giro 19-bit | |
| Interfaccia del driver | EtherCAT/CAN | |
| Loop di controllo | Loop di corrente 50 kHz; loop di velocità 10 kHz | |
| Dimensioni complessive | R68 x 66.3 mm | |
| Peso complessivo | 0.8 kg | |
| Applicazioni tipiche delle articolazioni | Spalla, Gomito, Ginocchio, Vita | |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Manuali
- Diagramma della struttura del prodotto HM-R68 (PDF)
- Specifiche di comunicazione seriale SC-0090-C001 (PDF)
Dettagli
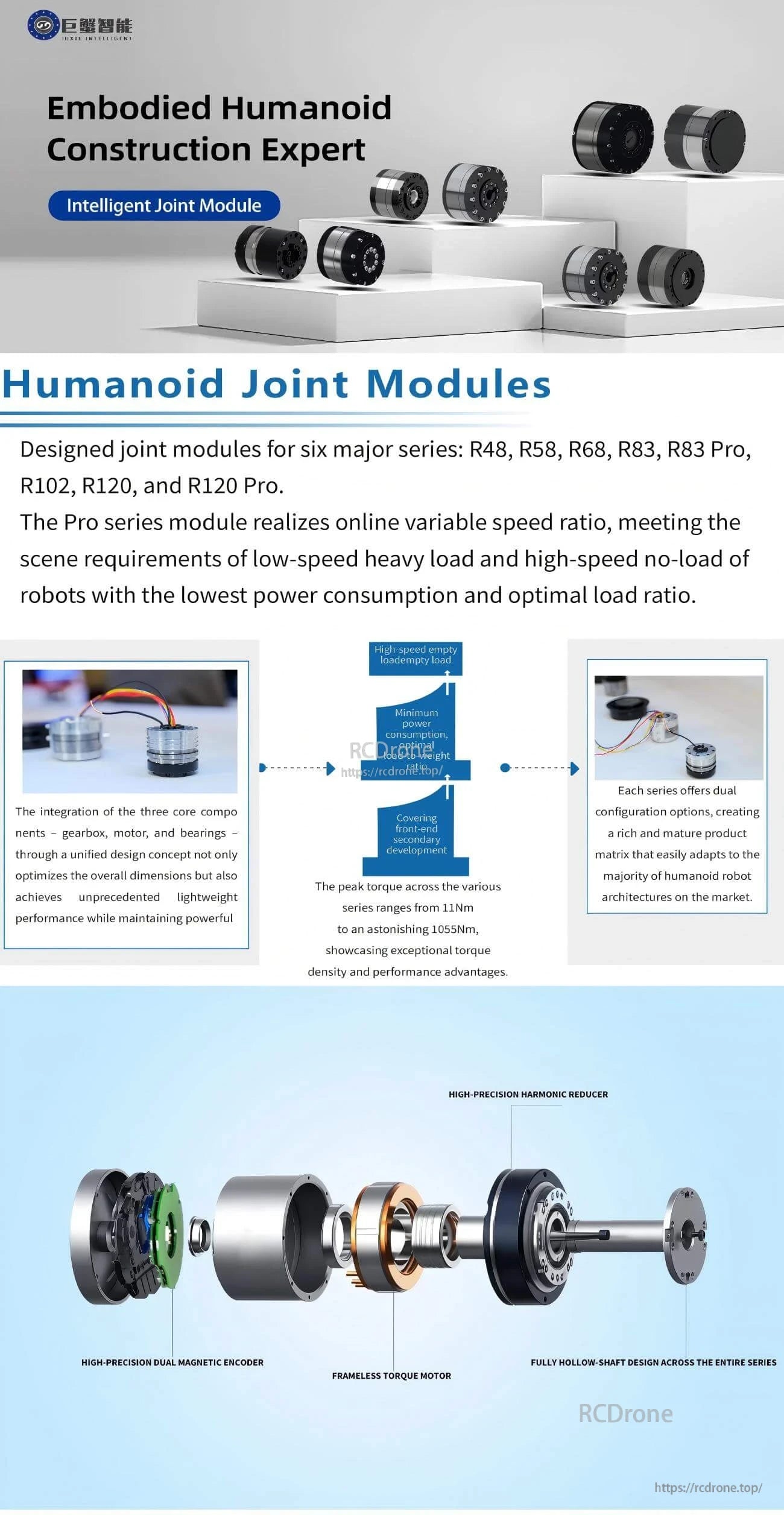
Moduli articolari umanoidi per le serie R48, R58, R68, R83, R83 Pro, R102, R120 e R120 Pro. Le caratteristiche includono riduttore armonico ad alta precisione, encoder magnetico duale, motore a coppia senza telaio e design completamente a albero cavo. Offre rapporto di velocità variabile, basso consumo energetico e alta densità di coppia.

Tre serie di motori robotici: R48 (OD 48mm, coppia 4Nm, 100 PRM), R58 (OD 58mm, coppia 8Nm, 90 PRM), R68 (OD 68mm, coppia 5Nm, 90 PRM). Tutti presentano interfaccia EtherCAT/CAN.

Related Collections

