













LINKERBOT Mano Robotica Linker Hand L10, 10 DoF, Controllo CAN/RS485, Trasmissione a vite senza fine, Presa 80N, DC24V+/-10%
LINKERBOT Mano Robotica Linker Hand L10, 10 DoF, Controllo CAN/RS485, Trasmissione a vite senza fine, Presa 80N, DC24V+/-10%
LINKERBOT
Impossibile caricare la disponibilità di ritiro
Panoramica
LINKERBOT La mano robotica Linker Hand L10 è progettata per una manipolazione abile e un controllo preciso. Presenta 10 gradi di libertà con trasmissione a vite e comunica tramite CAN/RS485 per un'integrazione affidabile in sistemi di ricerca e industriali.
Caratteristiche principali
- Mano abile con 10 DoF e trasmissione a vite per un'attuazione stabile.
- Interfacce di controllo: CAN e RS485.
- Precisione di posizionamento ripetuto < +/-0.2mm; tempo tipico di apertura/chiusura 1.2s.
- Capacità di forza: 15N max forza della punta del pollice, 15N max forza della punta delle quattro dita, 80N max forza di presa delle cinque dita.
- Modalità di controllo e utilità dal manuale del prodotto: controllo della posizione, controllo della velocità, feedback aptico (controllo della forza) tramite sensori della punta delle dita e aggiornamento del firmware online.
- Ecosistema (per materiali del prodotto): bracci robotici supportati UR, Franka, XArm, RealMan, AgileX; simulatori supportati Pybullet, Isaac, MuJoCo; esempi di utilizzo includono ROS1, ROS2, Python, C++; metodi di acquisizione dati includono guanti di teleoperazione, guanti eseoscheletrici, guanti di rilevamento in metallo liquido, visione e VR (Meta Quest 3).
Per supporto pre-vendita o integrazione, contattare [email protected] or visita https://rcdrone.top/.
Specifiche
| Gradi di Libertà (DoF) | 10 |
| Numero di Giunti | 20 (10 Attivi + 10 Passivi) |
| Modalità di Trasmissione | Trasmissione a Vite |
| Interfaccia di Controllo | CAN/RS485 |
| Peso | 800g |
| Carico Massimo | 25kg |
| Voltaggio di Funzionamento | DC24V+/-10% |
| Corrente Statica | 0.2A |
| Corrente Media (Movimento a Vuoto) | 0.5A |
| Corrente Massima | 3A |
| Precisione di Ripetizione della Posizione | < +/-0.2mm |
| Tempo di Apertura/Chiusura | 1. |
| Forza Massima della Punta del Pollice | 15N |
| Forza Massima della Punta di Quattro Dita | 15N |
| Forza Massima di Presa con Cinque Dita | 80N |
Sensore di Pressione
| Array Piezoresistivo | 6*12 |
| Area di Supporto del Sensore | 9.6*14.4mm |
| Forza di attivazione | 5g |
| Intervallo di misura | 20N |
| Durata del servizio | 100.000 cicli |
| Frequenza di comunicazione | 200FPS |
Sensore capacitivo (opzionale)
| Frequenza di campionamento | >=50Hz |
| Intervallo di misura | 0-30N |
| Limite di sovraccarico | 60N |
| Sensibilità alla pressione | 0.1N |
| Risoluzione di misura | 0.5%FS |
| Precisione di misura | 2%FS |
| Risoluzione della pressione | 0.25N |
| Risoluzione della Direzione | 45° |
| Distanza di Rilevamento | 1cm (Metallo, Corpo Umano) |
Cosa è Incluso
- Cavo di Debug USB-to-CAN x1
- Cavo di Collegamento XT30 (2+2) x1
- Adattatore di Alimentazione x1
- Cavo di Alimentazione x1
- Linker Hand L10 x1
Applicazioni
- Ricerca e istruzione sulla manipolazione abile utilizzando ROS1/ROS2 e simulatori (Pybullet, Isaac, MuJoCo).
- Teleoperazione tramite guanti, guanti esoscheletrici, guanti di rilevamento in metallo liquido, visione e VR (Meta Quest 3).
- Assemblaggio di precisione, operazioni basate su percorso, serraggio di viti, afferraggio di fogli sottili e manipolazione generale degli oggetti.
Manuali
Linker_Hand_L10_Product_Manual.pdf
Dettagli

Il Linker Hand L10 offre 10 DOF, movimento preciso tramite meccanismo di collegamento e driver personalizzati per motori. Supporta UR, Franka, ROS, Python, VR, Pybullet, CAN e altro per un'integrazione e controllo robotico versatili.
Il Linker Hand L10 offre alta destrezza, con ogni dito che offre 4 gradi di libertà per operazioni precise. Il suo sistema multi-sensore, dotato di telecamere e pelle elettronica, fornisce una consapevolezza ambientale completa e un'interazione adattativa. Attraverso l'integrazione end-cloud, gli utenti possono implementare rapidamente la mano tramite un servizio cloud di libreria di abilità senza codice, consentendo una personalizzazione efficiente riducendo al contempo la complessità operativa. Insieme, queste capacità supportano una vasta gamma di applicazioni complesse, migliorando sia la precisione che la facilità d'uso senza richiedere una programmazione o una configurazione estesa.

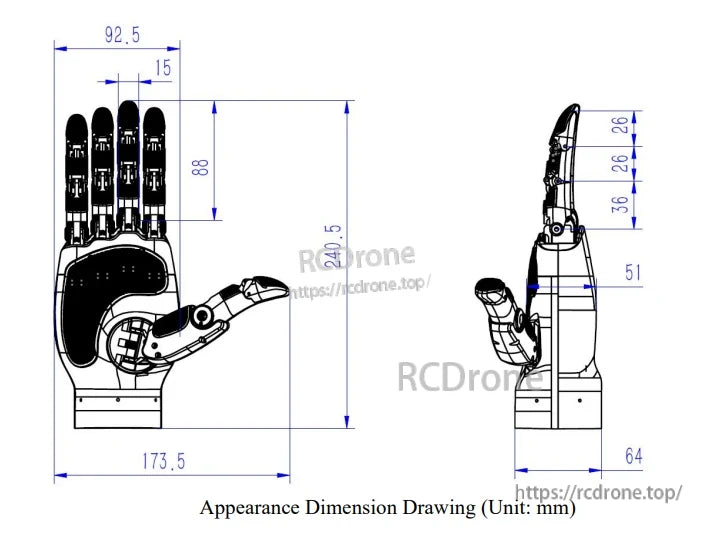
Dimensioni della mano robotica in millimetri, mostrando viste frontali e laterali con misurazioni precise per design e assemblaggio.
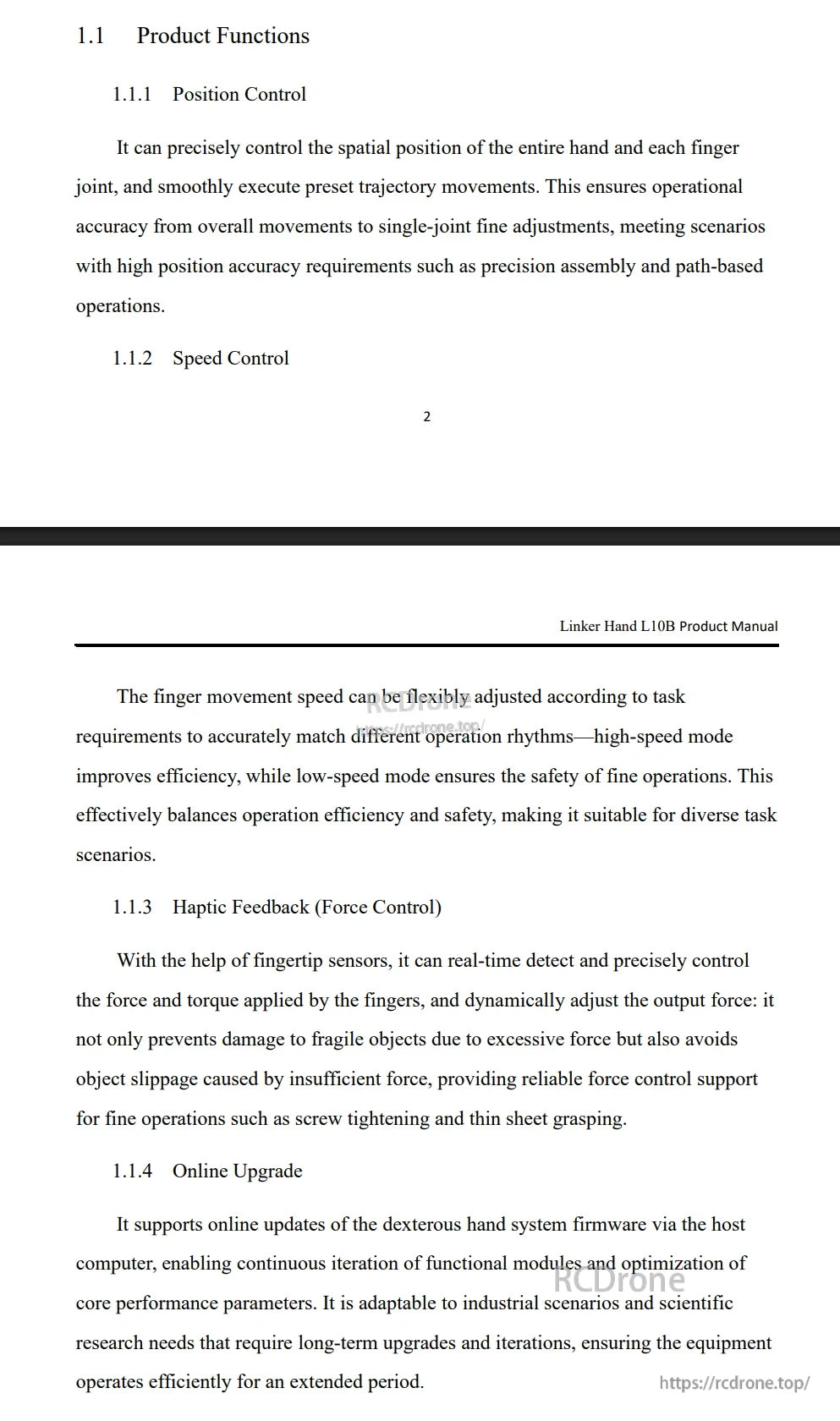
La mano Linker L10B offre un controllo preciso della posizione e della velocità, feedback aptico per la gestione della forza e aggiornamenti del firmware online. Progettata per precisione, sicurezza e adattabilità in applicazioni industriali e di ricerca che richiedono manipolazione fine e prestazioni a lungo termine.
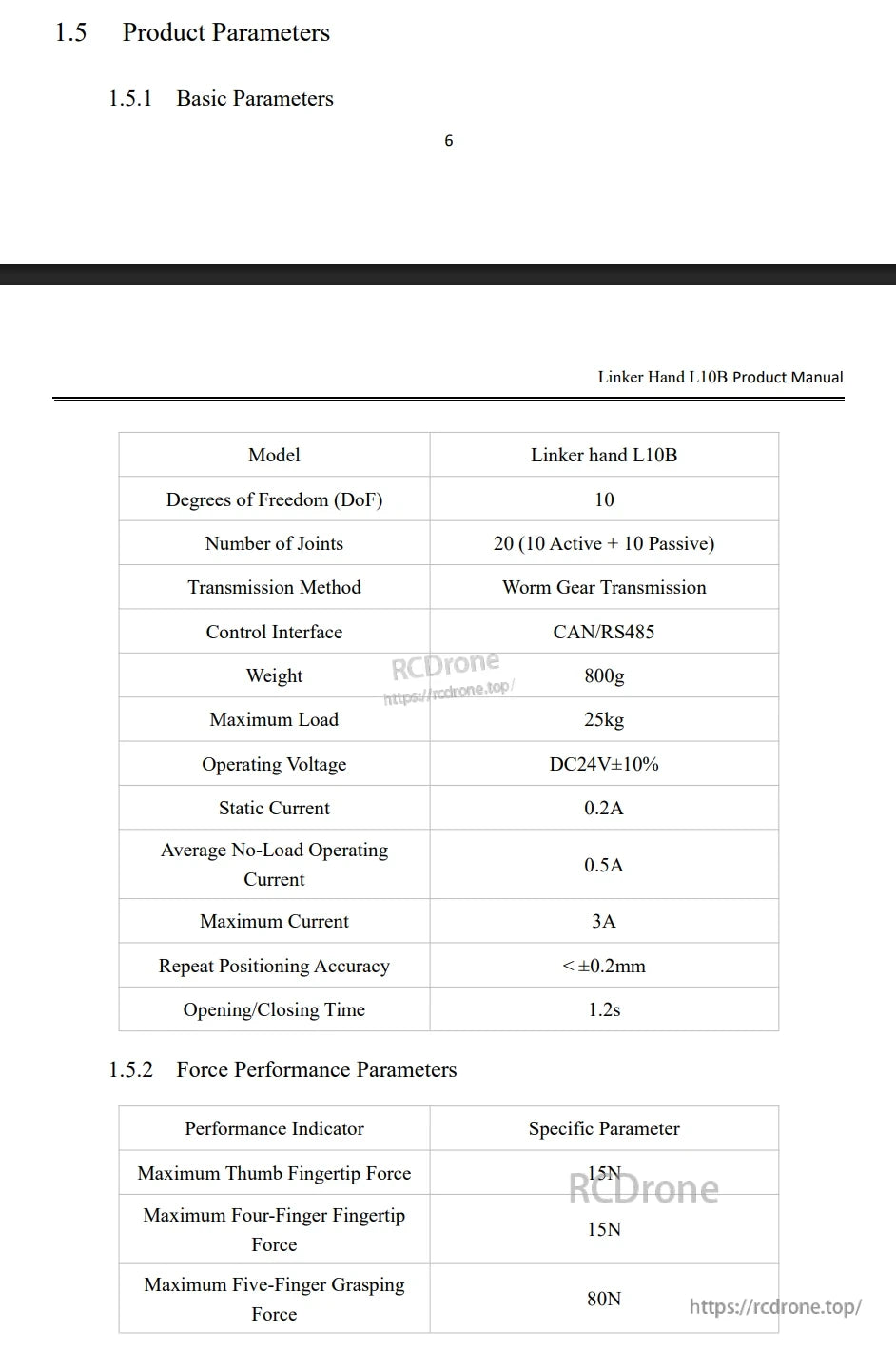
La mano Linker L10B offre 10 DoF, 20 giunti, trasmissione a vite senza fine e controllo CAN/RS485. Pesando 800g, gestisce fino a 25kg a DC24V, fornendo posizionamento preciso e forze di presa fino a 80N.

Presenta un array piezoresistivo 6x12 (intervallo 20N, 100k cicli). Sensore capacitivo opzionale: ≥50Hz di campionamento, intervallo 0–30N, risoluzione direzionale di 45°, rileva metallo o corpo umano a 1cm.
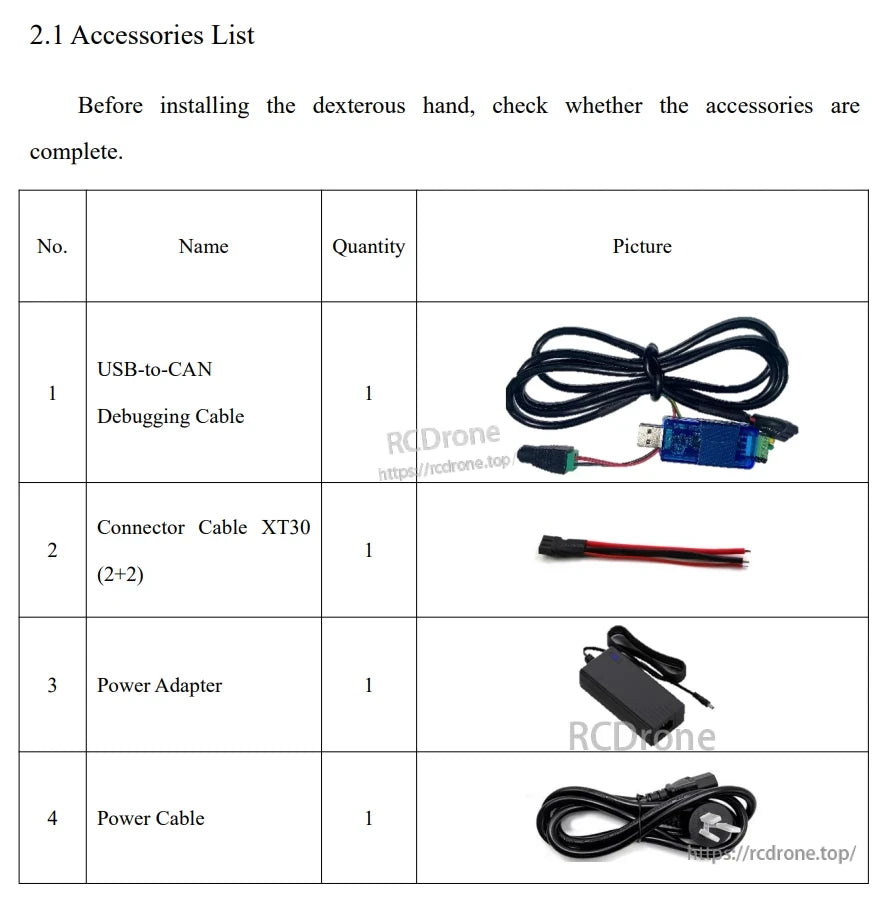
Elenco accessori per l'installazione della mano abile: cavo USB-to-CAN, connettore XT30, adattatore di alimentazione e cavo di alimentazione, ciascuno in quantità uno.
Related Collections













