







LINKERBOT Mano Robotica Linker Hand L6, 6 DoF, CAN, Trasmissione a Leva, Presa 50N, Ripetibilità ±0,2mm
LINKERBOT Mano Robotica Linker Hand L6, 6 DoF, CAN, Trasmissione a Leva, Presa 50N, Ripetibilità ±0,2mm
LINKERBOT
Impossibile caricare la disponibilità di ritiro
Panoramica
LINKERBOT La mano robotica Linker Hand L6 è progettata per una manipolazione precisa. Presenta 6 gradi di libertà (DoF) e 11 giunti (6 attivi + 5 passivi) con trasmissione a collegamento e interfaccia di controllo CAN. La struttura mostrata nelle immagini del prodotto evidenzia dita interamente in metallo, silicone resistente all'usura sulle punte delle dita, sensori di pressione tattili a cinque dita, luci indicatori, un pad in gomma anti-pizzicamento a metà palmo e un cilindro elettrico ad alta precisione a azionamento diretto.
Caratteristiche principali
- Manipolazione abile a 6 DoF; 11 giunti (6 attivi + 5 passivi).
- Trasmissione a collegamento con controllo bus CAN.
- Precisione di riposizionamento: ±0,2 mm.
- Capacità di forza: forza massima della punta del pollice 10N; forza massima della punta delle quattro dita 8N; forza massima di presa a cinque dita 50N.
- Array di sensori tattili piezoresistivi a cinque dita per misurazione del contatto/pressione.
- Elementi di design mostrati: dita interamente in metallo, punte in silicone resistenti all'usura, luce indicatrice, pad in gomma anti-pizzicamento.
- Layout compatto & agile; sistema multi-sensore (inclusi telecamere e pelle elettronica) e integrazione dispositivo-cloud come mostrato nelle immagini del prodotto.
Per vendite e supporto tecnico, contattare [email protected] or visitare https://rcdrone.top/.
Specifiche
| Parametro | Valore |
|---|---|
| Gradi di Libertà (DoF) | 6 |
| Numero di Giunti | 11 (6 Attivi + 5 Passivi) |
| Modalità di Trasmissione | Trasmissione a Collegamento |
| Interfaccia di Controllo | CAN |
| Peso | 623.5g |
| Carico Massimo | 28kg |
| Tensione di Funzionamento | DC24V±10% |
| Corrente Statica | 0.2A |
| Corrente Media (Movimento a Vuoto) | 0.75A |
| Corrente Massima | 1.4A |
| Precisione di Ripetizione della Posizione | ±0.2mm |
| Forza Massima della Punta del Pollice | 10N |
| Forza Massima della Punta delle Quattro Dita | 8N |
| Forza Massima di Presa delle Cinque Dita | 50N |
Prestazioni di Movimento
| Parte in Movimento | Intervallo Angolare (°) | Velocità di Movimento (°/s) |
|---|---|---|
| Base del Pollice | 57 | 152.82 |
| Base dell'Indice | 72.30 | 213.27 |
| Base del Medio | 72.90 | 208.29 |
| Base dell'Anulare | 73.10 | 202.49 |
| Base del Mignolo | 72.60 | 201.11 |
| Punta del Pollice | 69.90 | 192.84 |
| Tip of Index Finger | 64.60 | 192.84 |
| Tip of Middle Finger | 65.10 | 185.32 |
| Tip of Ring Finger | 66.90 | 185.32 |
| Tip of Little Finger | 66.70 | 184.76 |
| Side Swing of Thumb | 80 | 235.29 |
| Opening and Closing Time | - | 0.35s |
Sensors
| Parameter | Specification |
|---|---|
| Piezoresistive Array | 6*12 |
| Sensor Force‑Bearing Area | 9.6*14.4mm |
| Forza di attivazione | 5g |
| Intervallo di misurazione | 20N |
| Durata del servizio | 100.000 cicli |
| Frequenza di comunicazione | 200FPS |
| Intervallo di valori | 0~4095 |
Dimensioni esterne
| Definizione | Parametro (mm) |
|---|---|
| Lunghezza dalla punta del dito medio alla base del palmo | 190.7 |
| Larghezza massima del palmo | 121 |
| Lunghezza dalla punta del pollice alla base del palmo | 134.3 |
| Altezza del polso | 9. | 5
| Diametro del polso | 60 |
Cosa è incluso
- Cavo di debug USB‑to‑CAN x1
- Cavo connettore XT30 (2+2) x1
- Adattatore di alimentazione x1
- Cavo di alimentazione x1
- Linker Hand L6 x1
Applicazioni
- Afferraggio preciso e manipolazione degli oggetti
- Afferraggio e manipolazione degli strumenti
- Compiti di pick-and-place dei componenti
Manuali
Manuale del prodotto Linker Hand L6 (PDF)
Dettagli


Mano robotica destro ad alte prestazioni con 6 gradi di libertà. Caratteristiche di agilità compatta, sistema multi-sensore e integrazione dispositivo-cloud per un controllo preciso, adattamento ambientale e personalizzazione senza codice tramite la libreria di abilità cloud.



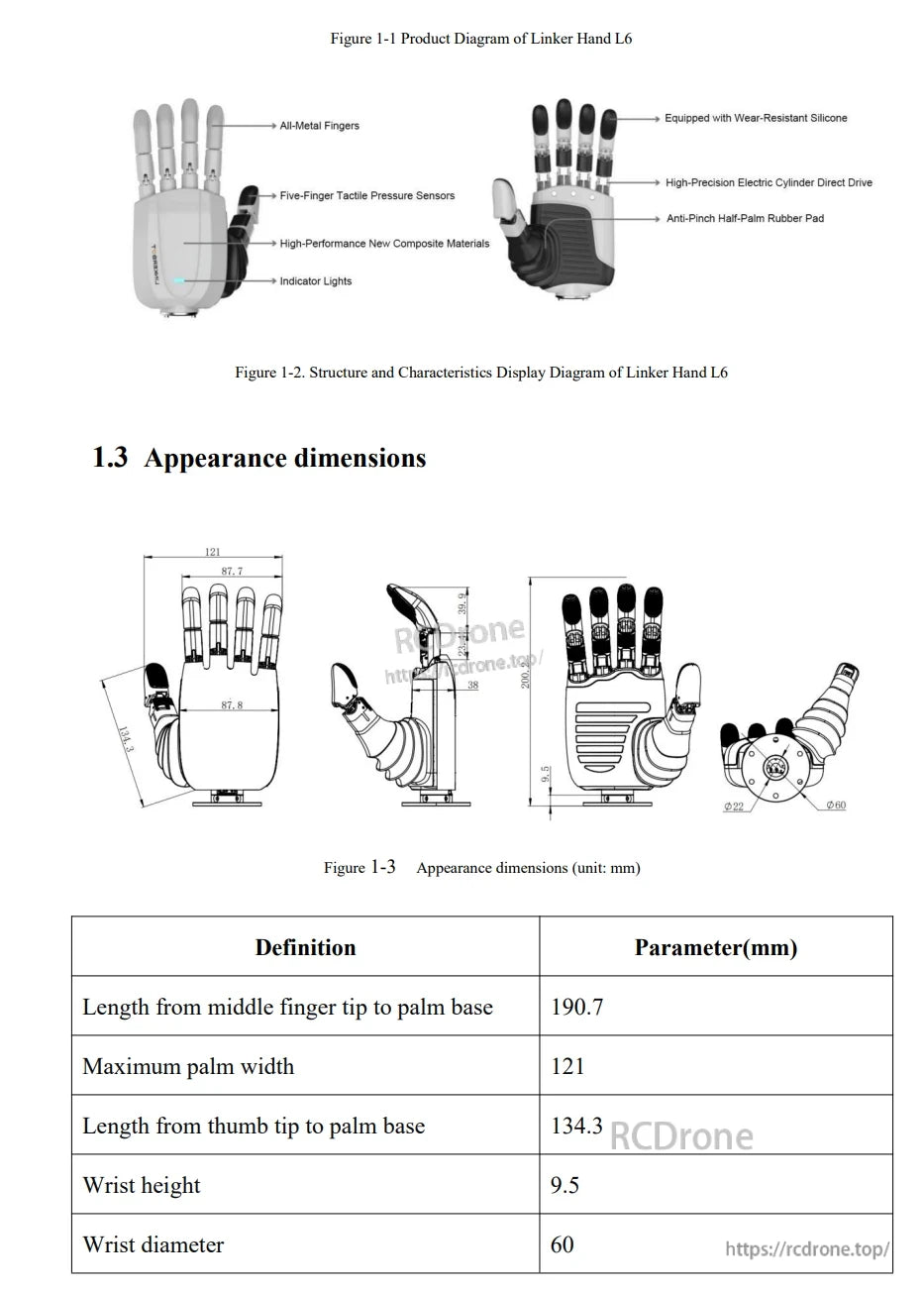
La Linker Hand L6 ha dita completamente metalliche, sensori tattili, silicone resistente all'usura, azionamento a cilindro elettrico e pad in gomma anti-pizzicamento. Lunghezza delle dita: 190,7 mm; larghezza del palmo: 121 mm; diametro del polso: 60 mm.
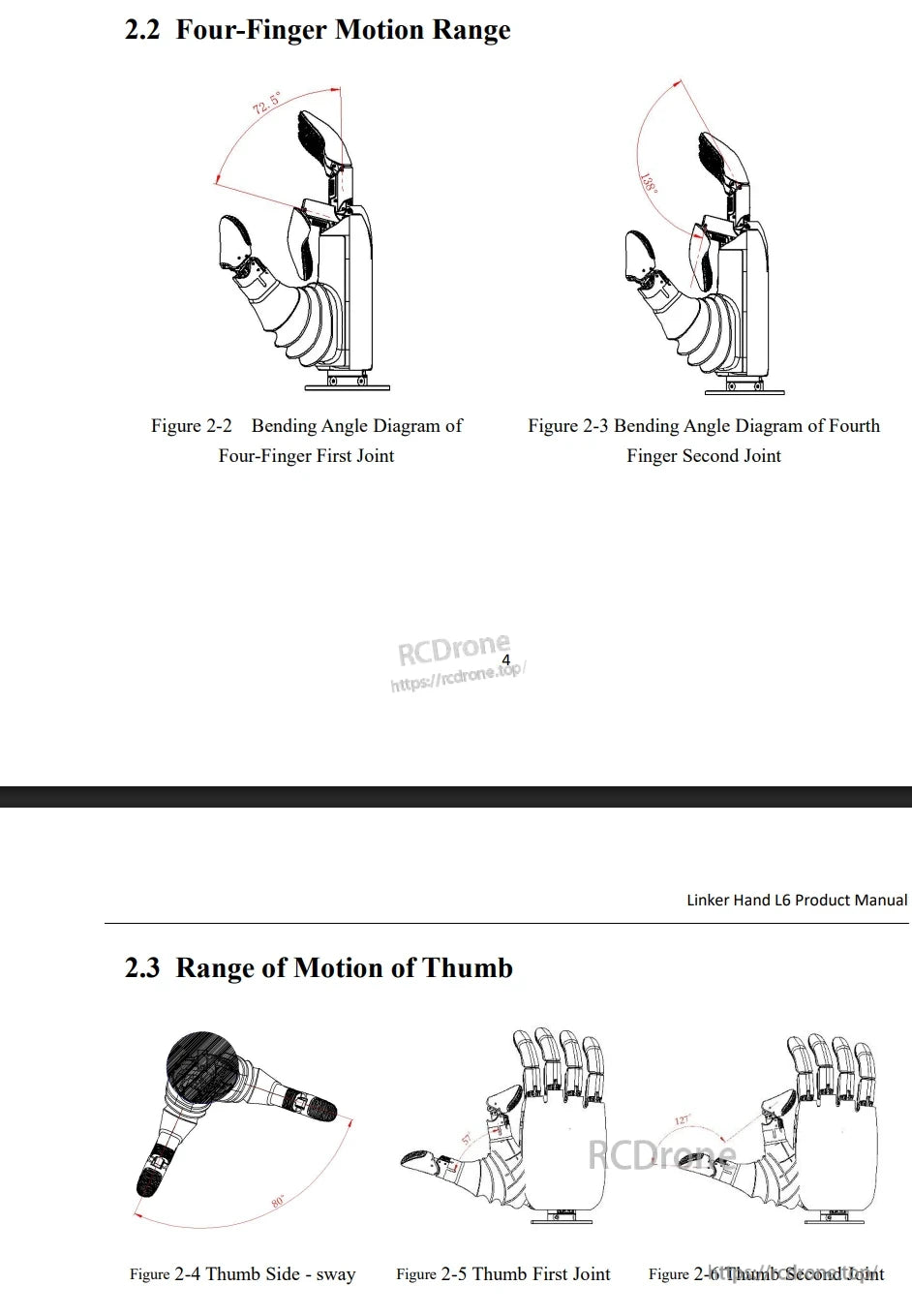
Intervalli di movimento delle articolazioni delle dita e del pollice: prima articolazione delle quattro dita 72,5°, seconda articolazione 138°; movimento laterale del pollice 80°, prima articolazione 57°, seconda articolazione 127°.
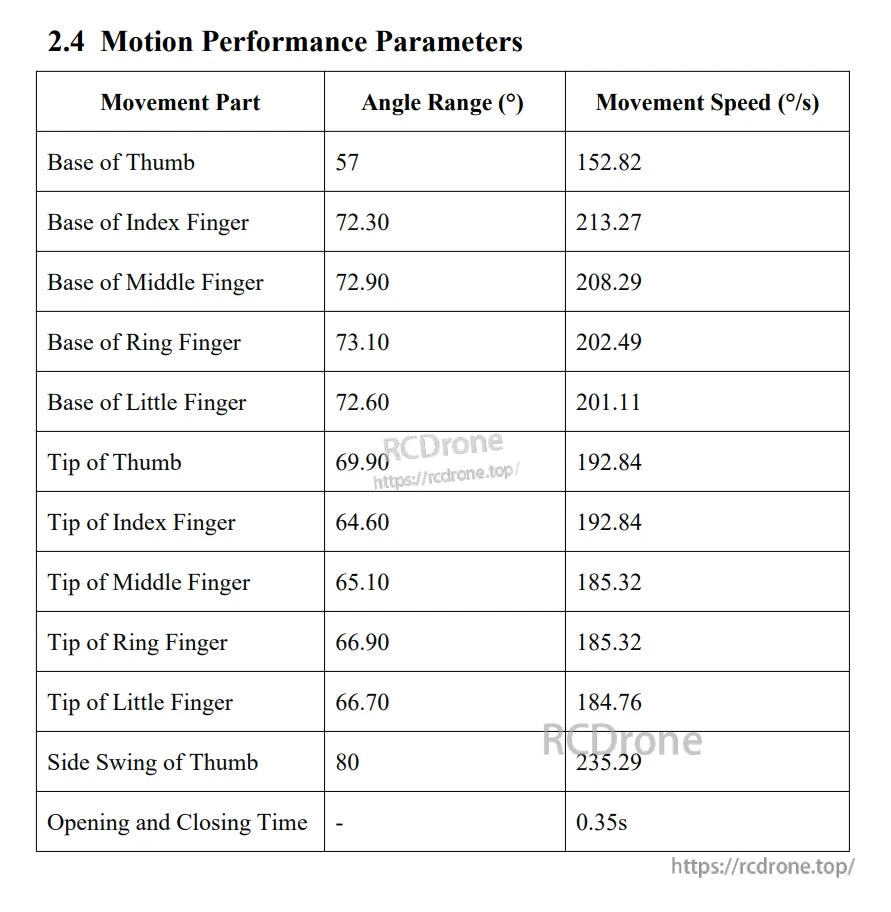
Parametri di movimento delle dita della mano robotica: oscillazione del pollice a 235,29°/s, apertura/chiusura in 0,35 secondi—mostrando un'articolazione precisa con intervalli angolari delle articolazioni e velocità dettagliate.
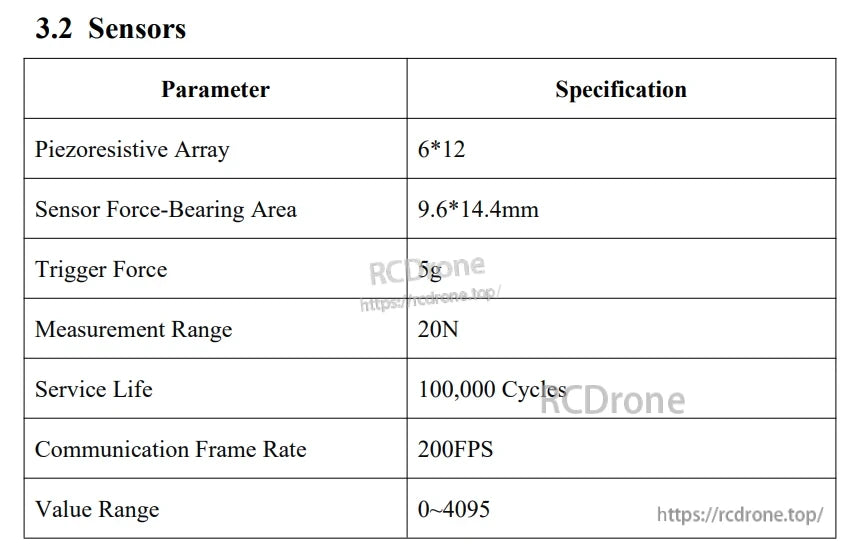
Specifiche del sensore: array 6x12, area 9,6x14,4 mm, attivazione a 5g, intervallo 20N, 100k cicli, 200FPS, intervallo di valori 0-4095.
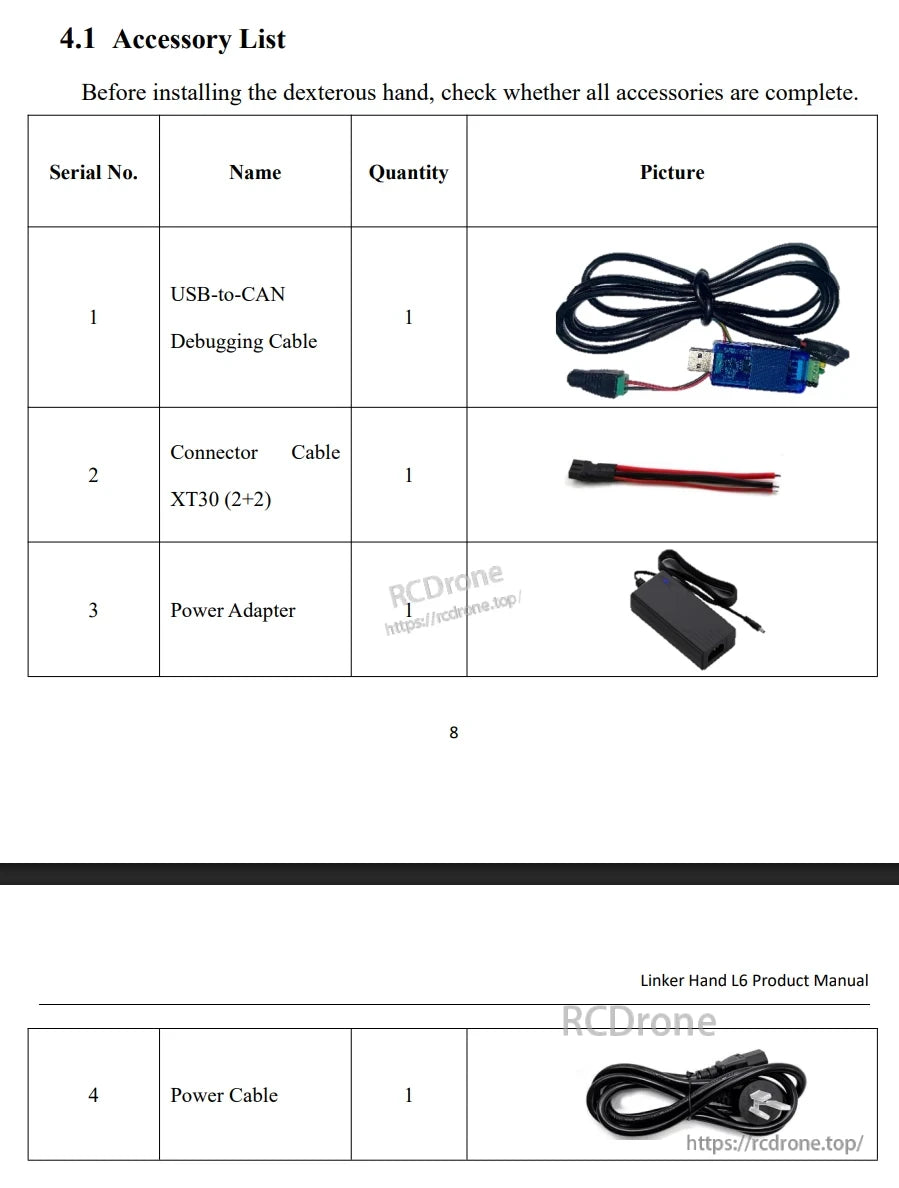
Elenco accessori per la Linker Hand L6: cavo USB-to-CAN, connettore XT30, adattatore di alimentazione e cavo di alimentazione. Verificare la completezza prima dell'installazione.
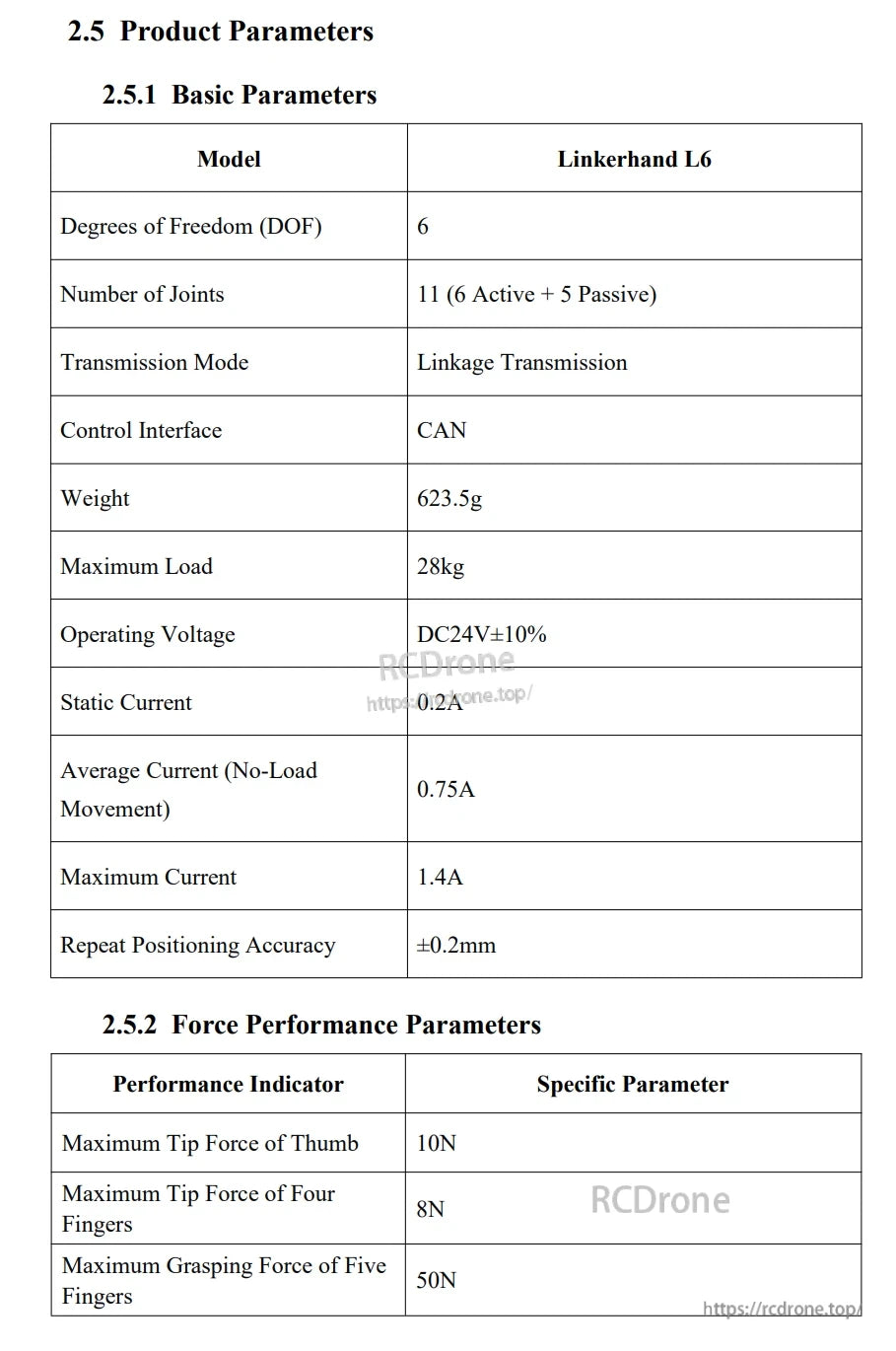
La mano robotica Linkerhand L6 ha 6 DOF, 11 giunti, controllo CAN, pesa 623,5 g, gestisce un carico massimo di 28 kg, funziona a DC24V±10%, offre una precisione di ±0,2 mm e fornisce una forza di presa fino a 50N.
Related Collections







