







LINKERBOT Mano Robotica Linker Hand O6, 6 DoF, 11 giunti, CAN/RS485, presa 130N, precisione ±0,2mm, DC24V±10%
LINKERBOT Mano Robotica Linker Hand O6, 6 DoF, 11 giunti, CAN/RS485, presa 130N, precisione ±0,2mm, DC24V±10%
LINKERBOT
Impossibile caricare la disponibilità di ritiro
Panoramica
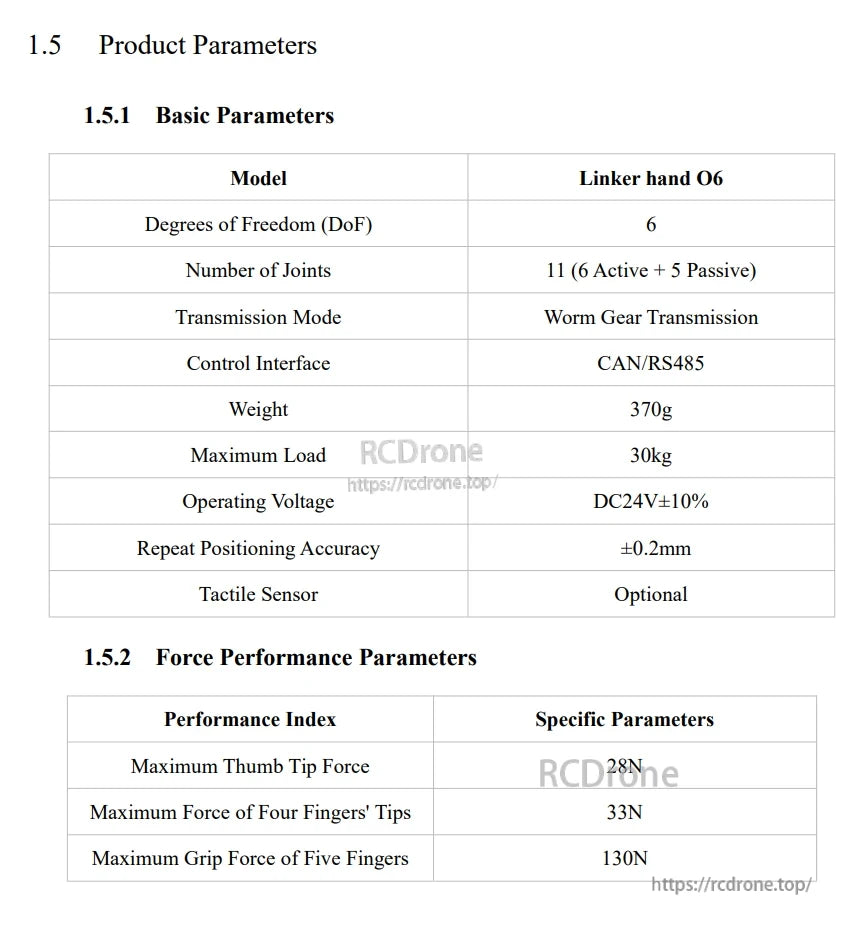
LINKERBOT Linker Hand O6 è una mano robotica progettata per un'integrazione compatta e una manipolazione precisa. Fornisce 6 DoF con 11 giunti (6 attivi + 5 passivi), trasmissione a vite per un'attuazione stabile, controllo CAN/RS485 e sensori tattili opzionali. La struttura abile offre fino a 130N di forza di presa a cinque dita con un'accuratezza di riposizionamento di ±0,2 mm a una tensione di funzionamento di DC24V±10%. La costruzione leggera di 370g e l'ingombro ridotto supportano la gestione logistica, l'assemblaggio industriale e scenari di presa di forme irregolari.
Caratteristiche principali
Compatto &e Agile
Il design strutturale compatto riduce il carico dell'attrezzatura migliorando al contempo la flessibilità per una presa precisa in spazi ristretti.
Alta Durabilità
Realizzato in lega di alluminio per resistenza leggera e all'usura, supportando prestazioni stabili a lungo termine.
Integrazione Dispositivo-Cloud
L'integrazione dispositivo-cloud consente un rapido deployment tramite una libreria di abilità basata su cloud con operazioni e personalizzazione semplificate.
Specifiche
| Modello | LINKERBOT Linker Hand O6 |
| Gradi di Libertà (DoF) | 6 |
| Numero di Giunti | 11 (6 Attivi + 5 Passivi) |
| Modalità di Trasmissione | Trasmissione a Vite |
| Interfaccia di Controllo | CAN/RS485 |
| Peso | 370g |
| Carico Massimo | 30kg |
| Tensione Operativa | DC24V±10% |
| Precisione di Ripetizione della Posizione | ±0.2mm |
| Sensore Tattile | Opzionale |
| Forza Massima della Punta del Pollice | 28N |
| Forza Massima delle Punte di Quattro Dita | 33N |
| Forza Massima di Presa di Cinque Dita | 130N |
| Dimensioni (Aspetto) | Altezza 177mm; Larghezza 76.5mm; Spessore 40mm |
Gamma di Movimento
| LF2, RF2, MF2, FF2 (Flesso) | 90° |
| LF1, RF1, MF1, FF1 (Flesso) | 80° |
| POLLICE1 (Flesso) | 55° |
| POLLICE2 (Flesso) | 30° |
| POLLICE3 (Laterale - oscillazione) | 88° |
Cosa è incluso
- Cavo di Debug USB-to-CAN ×1
- Cavo di Collegamento XT30 (2+2) ×1
- Adattatore di Alimentazione ×1
- Cavo di Alimentazione ×1
- Linker Hand O6 x1
Per vendite o supporto tecnico, contattare [email protected] or visita https://rcdrone.top/.
Applicazioni
- Gestione logistica e trasferimento di materiali
- Assemblaggio industriale e manipolazione degli strumenti
- Presa stabile di forme irregolari e articoli di consumo
Manuali
Linker_Hand_O6_Product_Manual.pdf
Dettagli

Linker Hand O6 offre 6 giunti attivi e 5 giunti passivi per una presa precisa e forte. Design compatto e durevole in alluminio adatto per logistica, assemblaggio e presa irregolare. Include integrazione cloud per un facile addestramento AI senza codifica.


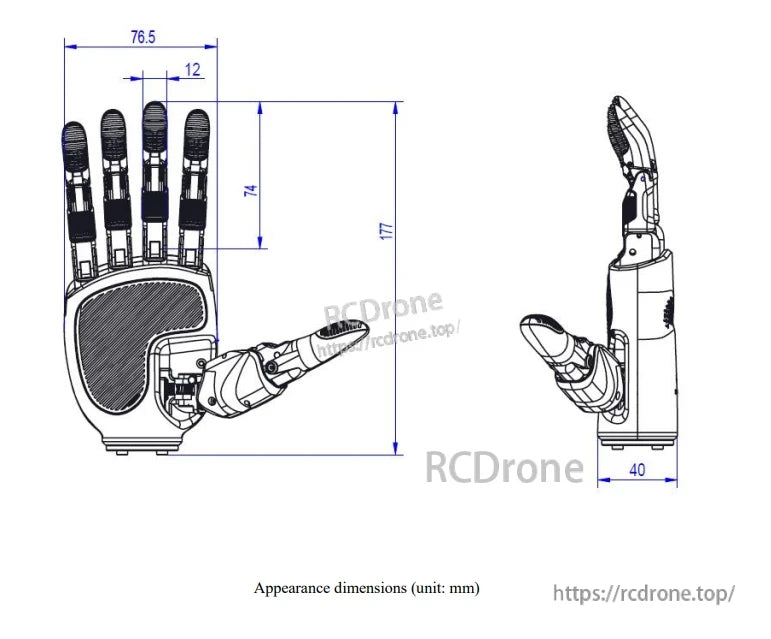
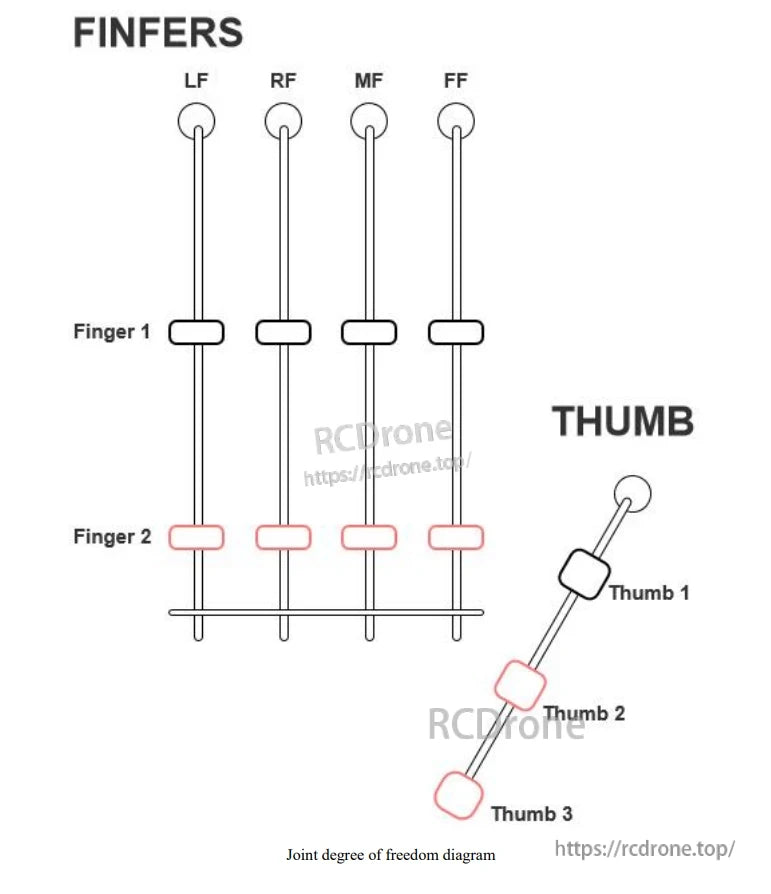
Diagramma dei gradi di libertà delle dita e del pollice
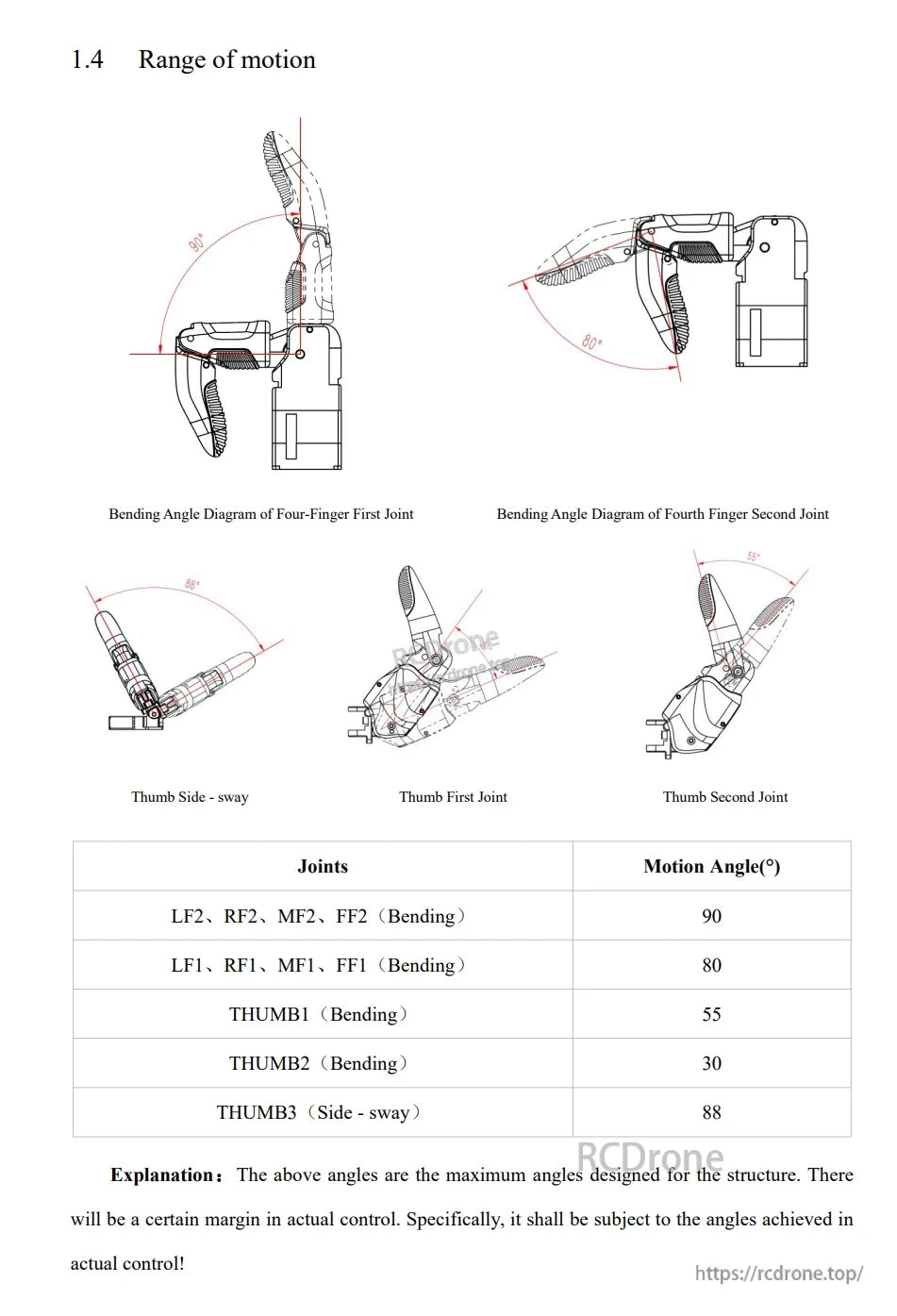
Le dita si piegano da 80 a 90°, il pollice si piega da 30 a 55°, e il movimento laterale raggiunge 88°. Questi sono gli angoli massimi progettati; il controllo effettivo può variare leggermente.
La mano robotica Linker Hand O6 ha 6 DoF, 11 giunti, trasmissione a vite, controllo CAN/RS485, pesa 370g, gestisce un carico massimo di 30kg, opera a DC24V±10%, con un'accuratezza di ±0.2mm, e offre sensori tattili opzionali con prestazioni di forza specificate.

Elenco accessori per l'installazione della mano destrosa: cavo USB-to-CAN, connettore XT30, adattatore di alimentazione e cavo di alimentazione—tutte le quantità sono una.
Related Collections







