



Motore LKMTECH MF4005-V2 12V RS485/CAN Encoder Magnetico 18bit Opzione Drive DF40V2 per Robotica
Motore LKMTECH MF4005-V2 12V RS485/CAN Encoder Magnetico 18bit Opzione Drive DF40V2 per Robotica
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
LKMTECH MF4005-V2 è un motore progettato per applicazioni meccatroniche integrate che richiedono un design leggero, alta precisione di controllo e alta coppia. L'aggiornamento MF4005 V2 evidenzia: risoluzione dell'encoder aggiornata da 14 bit a 18 bit, ottimizzazione della coppia di cogging, supporto per input PWM e comunicazione CAN/RS485 con diverse opzioni di baud rate.
Caratteristiche principali
- Design integrato: integrazione meccanica-elettrica
- Design leggero: design appiattito di leghe di alluminio aerospaziale
- Alta precisione di controllo: encoder magnetico (l'aggiornamento MF4005 V2 indica 14-bit aggiornato a 18-bit)
- Alta coppia di uscita: magnete permanente RbFeB ad alte prestazioni
- Supporta input PWM
- Comunicazione: CAN o RS485
- Funzioni di guida: può passare tra modalità coppia, modalità velocità e modalità posizione
- Controllo principale: processore ARM Cortex-M4 ad alta efficienza a 32 bit (guida)
- Monitoraggio in tempo reale della temperatura dello statore (guida)
- Stadio di potenza di guida: circuito a ponte completo con bassa resistenza interna e alta corrente
- Encoder magnetico assoluto a singolo giro a 18-bit (testo della funzione di guida); una calibrazione, posizione zero mai persa
- Note di costruzione del motore: rotore esterno; design ad arco multi-stadio con magnete permanente; intervallo d'aria più piccolo; magnetizzazione radiale; 0.2 mm foglio di acciaio al silicio; filo smaltato isolato classe H; NdFeB di grado SH
- servizio OEM/ODM (non una specifica del prodotto)
- Software di parametri: software del programma fornito per regolare i parametri, testare e aggiornare; supporta lo sviluppo open source come PC, MCU, PLC, ICP e RPi
Scenari di Applicazione
- Robot Umani
- Bracci Robotici
- Eseoscheletri
- Robot Quadrupedi
- Veicoli AGV
- Robot ARU
- Camera PTZ
- Laser Lidar
- Robot di Ispezione della Centrale Elettrica
- Ispezione Industriale
Specifiche
Modello del motore: MF4005-V2
| Parametro | Valore (25 giri) | Valore (40 giri) |
|---|---|---|
| Nome dell'Articolo | MF4005-V2 | MF4005-V2 |
| Giri | 25 | 40 |
| Tensione nominale | 12V | 12V |
| Velocità massima | 2390RPM | 1300RPM |
| Momento torcentale nominale | 0.07 N.m | 0.06 N.m |
| Velocità nominale | 1600RPM | 700RPM |
| Corrente nominale | 1.44A | 0.81A |
| Potenza massima | 14W | 4.6W |
| Momento torcentale massimo | 0.25 N.m | 0.12 N.m |
| Costante di velocità | 133 rpm/V | 58 rpm/V |
| Costante di coppia | 0.05 N.m/A | 0.07 N.m/A |
| Tipo di avvolgimento | Y | Y |
| Resistenza di fase | 1.9Ω | 4.3Ω |
| Induttanza di fase | 0.5mH | 1.2mH |
| Poli del Motore | 26 | 26 |
| Inerzia del rotore | 56 gcm² | 56 gcm² |
| Temperatura del Motore | SÌ | SÌ |
| Carico Nominale del Cuscinetto | 140N | 140N |
| Peso del Motore | 65g | 65g |
| Consiglia Drive | DF40V2 | DF40V2 |
| Voltaggio di ingresso del Drive | 7.4-32V | 7.4-32V |
| Comunicazione | RS485 O CAN | RS485 O CAN |
| Frequenza di comunicazione | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | Encoder magnetico 18bit | Encoder magnetico 18bit |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia (24KHz) / Loop di velocità (8KHz) / Loop di posizione (8KHz) | Loop di coppia (24KHz) / Loop di velocità (8KHz) / Loop di posizione (8KHz) |
| Curva di accelerazione | Accelerazione trapezoidale | Accelerazione trapezoidale |
Definizione dell'interfaccia
Interruttore ID: INTERRUTTORE ID
| Interfaccia | Nota |
|---|---|
| A/L | RS485-A o CAN-L |
| B/H | RS485-B o CAN-H |
| V+ | Alimentazione Positiva |
| V+ | Alimentazione Positiva |
| V- | Alimentazione Negativa |
| V- | Alimentazione Negativa |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND Segnale |
Per supporto pre-vendita o integrazione (configurazione RS485/CAN, selezione della velocità di baud e file CAD), contattare [email protected] or visita https://rcdrone.top/.
Manuali / File
Dettagli

MF4005‑V2 integra motore, encoder e funzionalità di azionamento per costruzioni robotiche compatte, con un encoder magnetico aggiornato a 18 bit e opzioni di comunicazione CAN/RS485.
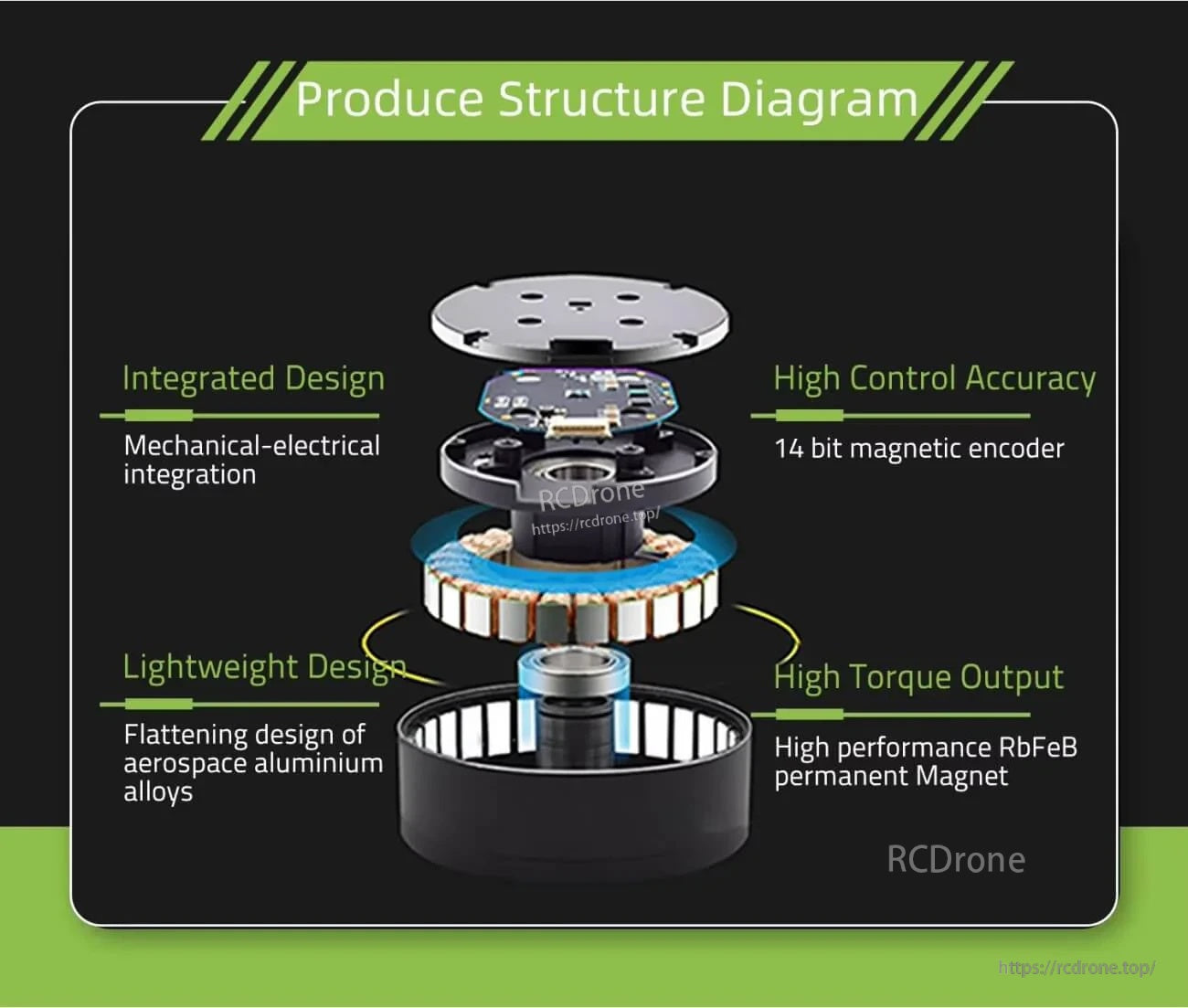
Una costruzione integrata e leggera combina l'elettronica di azionamento con l'assemblaggio del motore per supportare un controllo preciso e un'alta coppia in uscita.
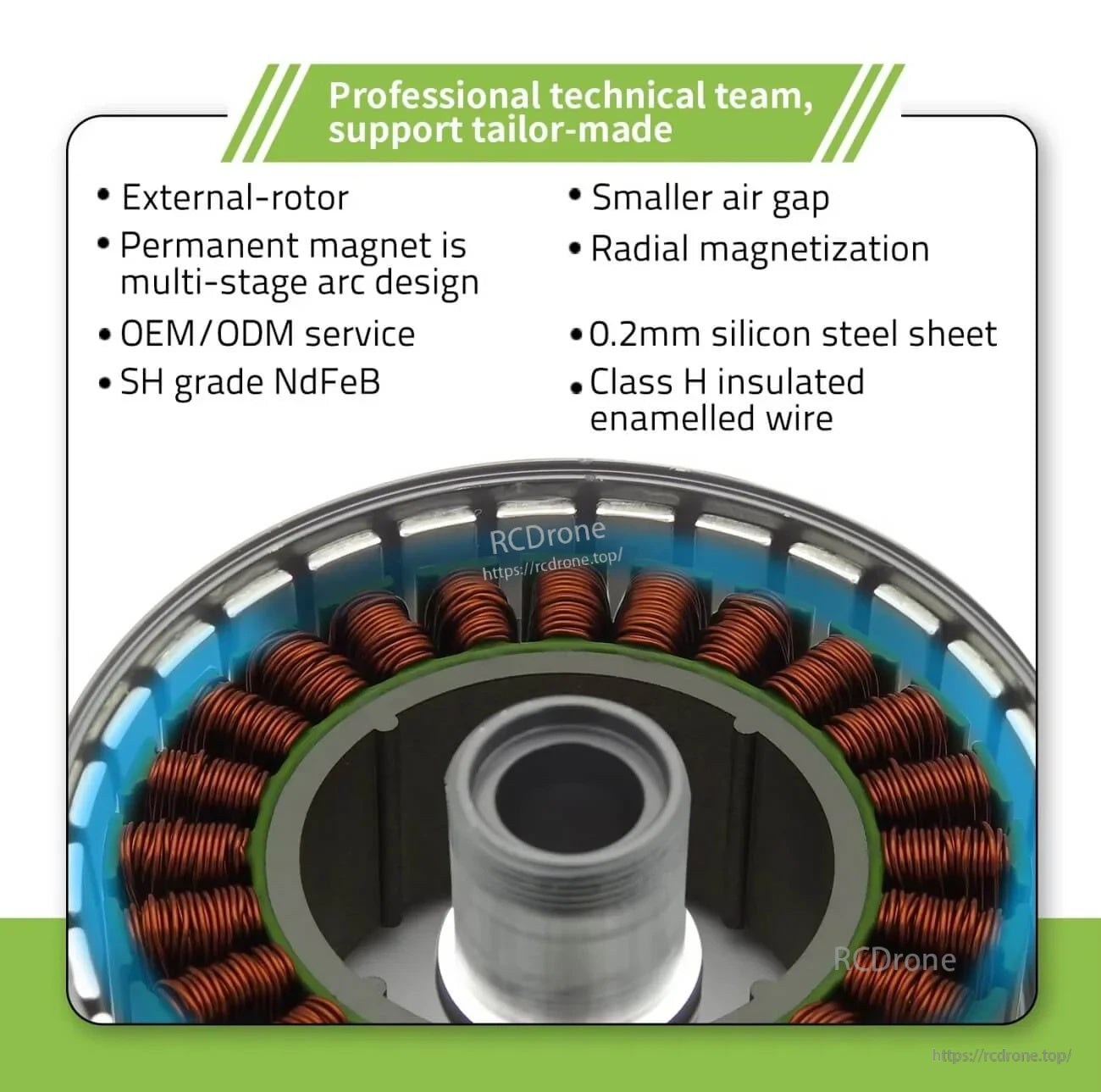
Il design a rotore esterno e il layout di avvolgimento denso aiutano a bilanciare dimensioni, reattività e coppia per giunti e attuatori robotici.
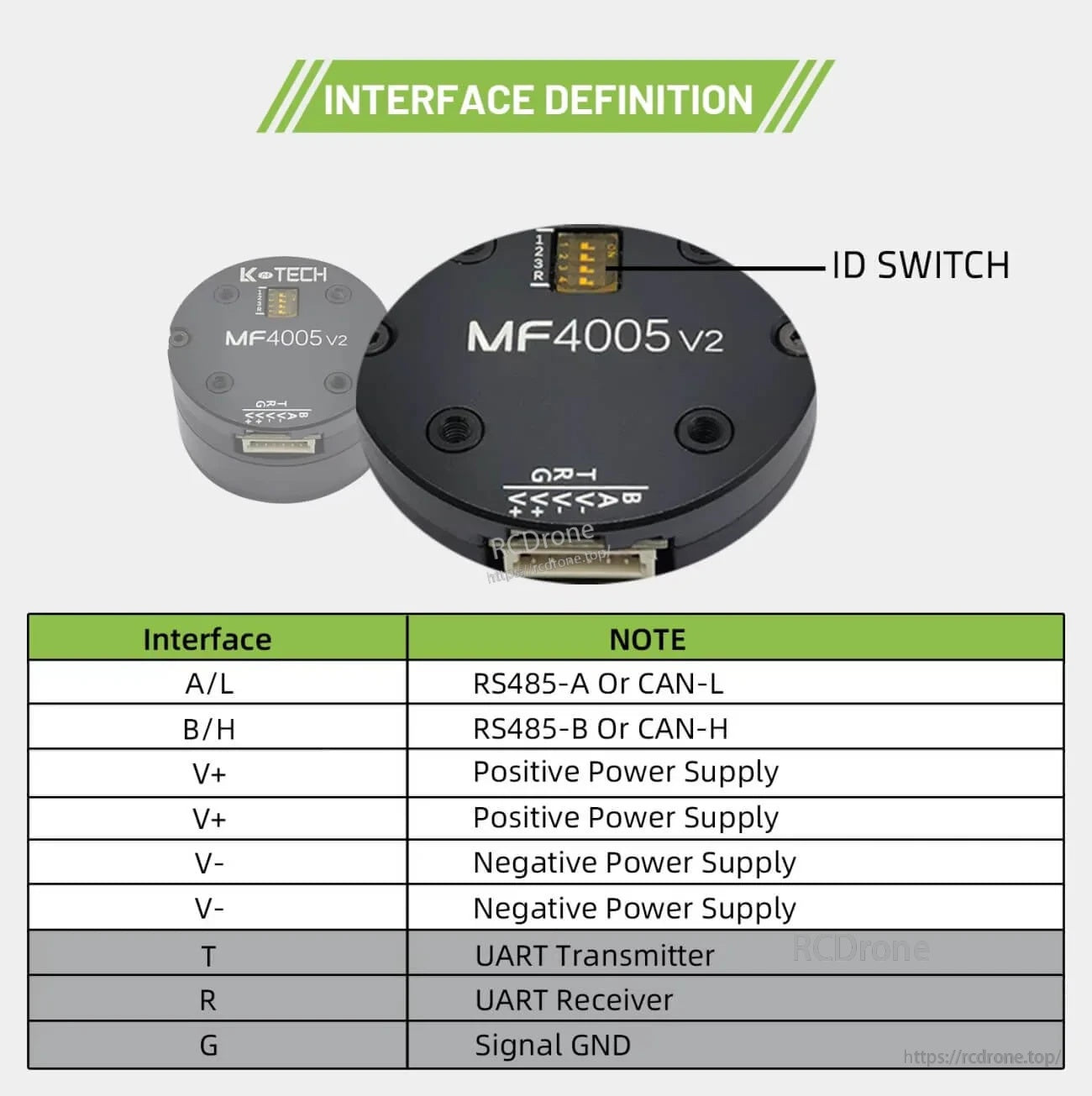
Il cablaggio è semplificato con un connettore chiaramente etichettato e un interruttore ID per configurazioni di bus che utilizzano RS485 o CAN.
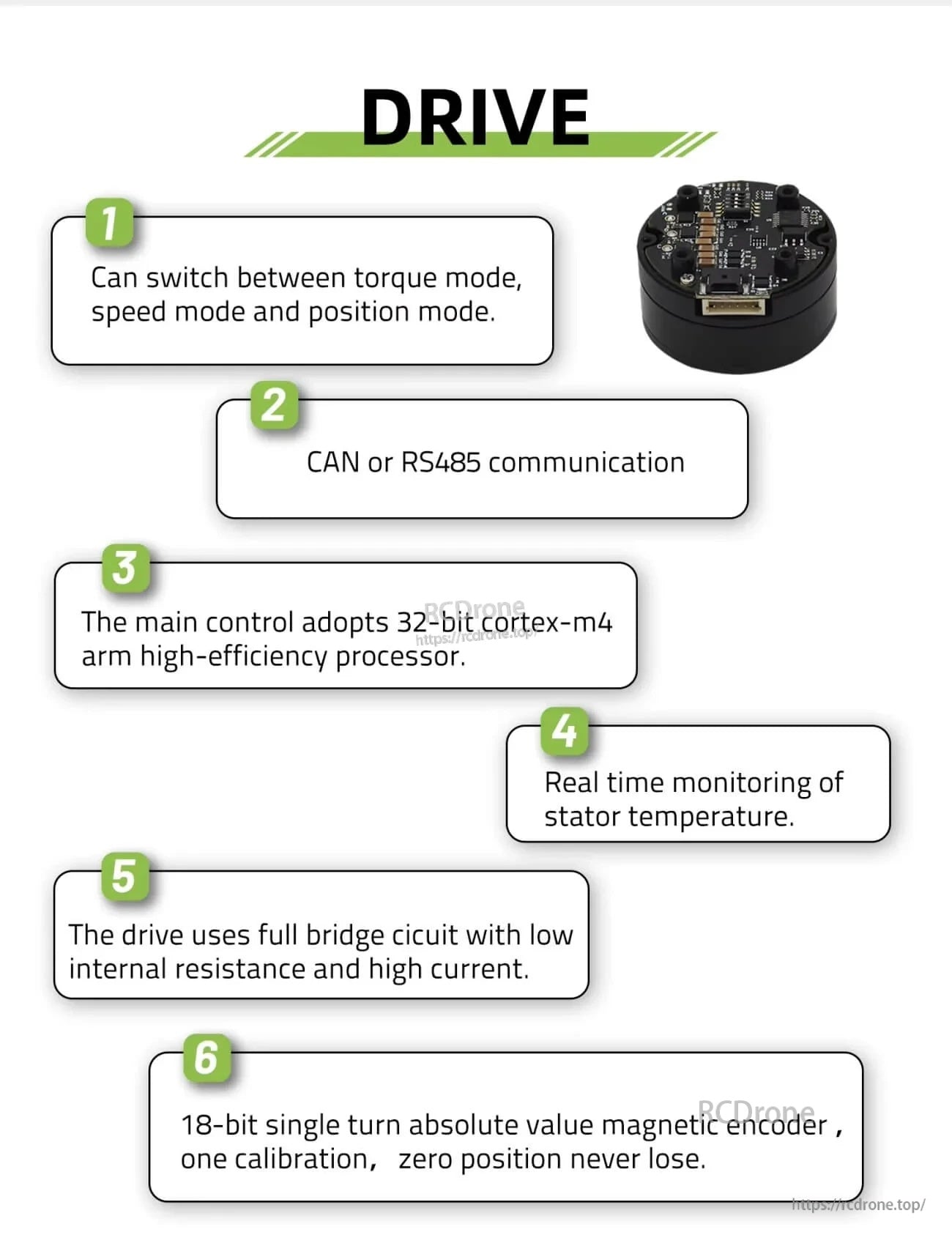
Le capacità di azionamento includono modalità di coppia, velocità e posizione selezionabili, oltre al monitoraggio della temperatura del statore in tempo reale tramite CAN o RS485.
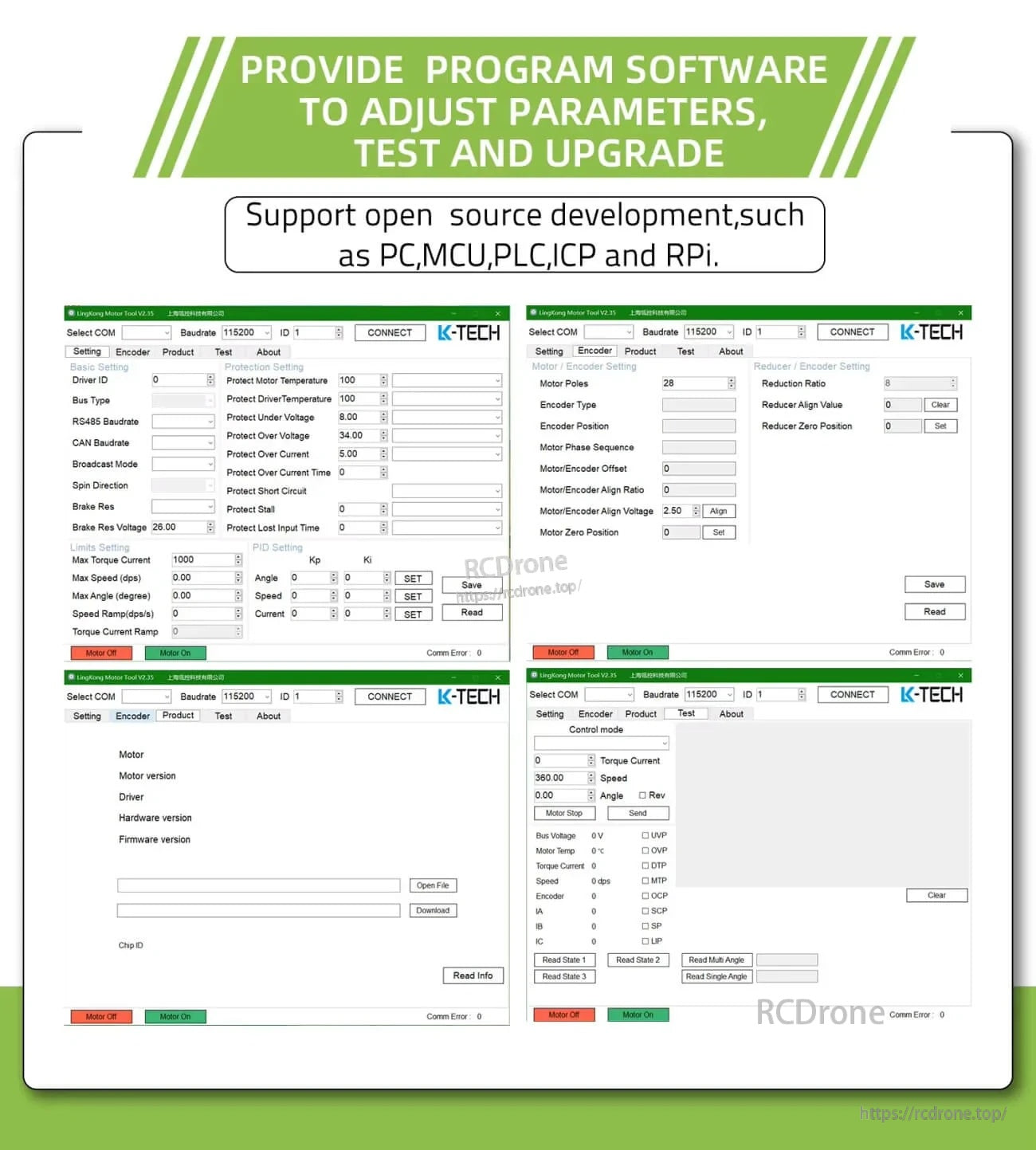
Il supporto software per PC aiuta con la regolazione dei parametri, i test e gli aggiornamenti, con opzioni adatte ai flussi di lavoro di sviluppo.
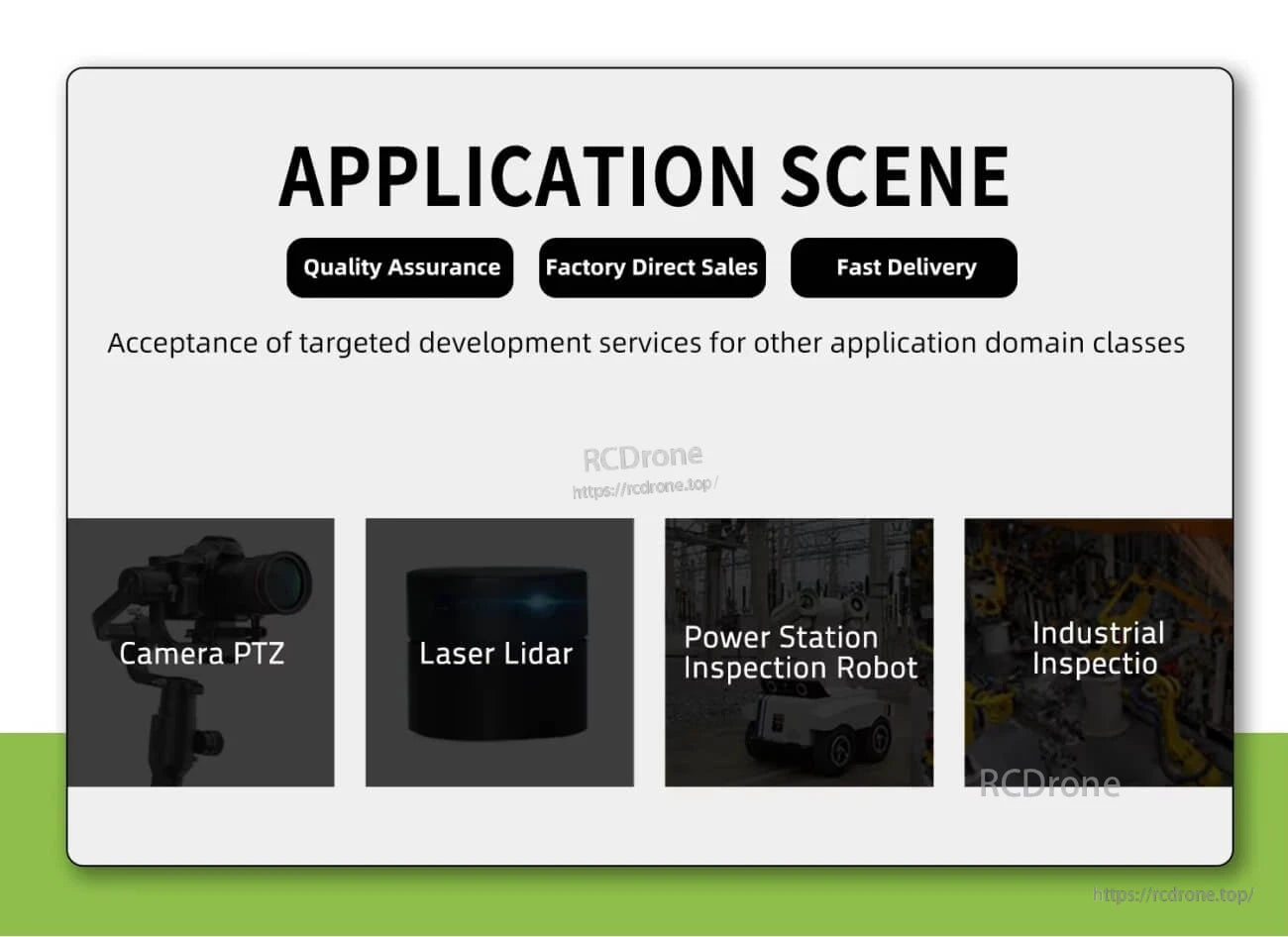
Le aree di applicazione comuni includono teste di telecamere PTZ, sistemi lidar e robot di ispezione utilizzati in ambienti industriali.
Related Collections



