



Motore LKMTECH MF5010-V2 16V 10T/35T, RS485/CAN, Encoder Magnetico 18bit per Robot & AGV
Motore LKMTECH MF5010-V2 16V 10T/35T, RS485/CAN, Encoder Magnetico 18bit per Robot & AGV
LKMTECH
Prezzo di listino
$131.00 USD
Prezzo di listino
Prezzo scontato
$131.00 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
Caratteristiche principali
- Design integrato (integrazione meccanica-elettrica)
- Design leggero
- Alta precisione di controllo
- Alta coppia di uscita
- Magnete permanente RbFeB ad alte prestazioni
- Encoder magnetico 18bit
- Comunicazione: RS485 o CAN
- Supporta input PWM
- Accelerazione trapezoidale
Scenari di applicazione
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
- Camera PTZ
- Lidar laser
- Robot per ispezione di stazioni di energia
- Ispezione industriale
Specifiche
| Parametro | MF5010-V2 (10T) | MF5010-V2 (35T) |
|---|---|---|
| Nome articolo | MF5010-V2 | MF5010-V2 |
| Giri | 10 | 35 |
| Tensione nominale | 16V | 16V |
| Velocità massima | 3050RPM | 870RPM |
| Momento torcentale nominale | 0.26N.m | 0.24N.m |
| Velocità nominale | 2400RPM | 440RPM |
| Corrente nominale | 5.06A | 1.35A |
| Potenza massima | 128W | 12W |
| Massimo coppia | 0.4N.m | 0.53N.m |
| Costante di velocità | 150rpm/V | 27.5rpm/V |
| Costante di coppia | 0.05N.m/A | 0.18N.m/A |
| Tipo di avvolgimento | Y | Y |
| Resistenza di fase | 0.33Ω | 3.2Ω |
| Induttanza di fase | 0.13mH | 1.2mH |
| Poli del motore | 28 | 28 |
| Inerzia del rotore | 202gcm² | 202gcm² |
| Temperatura del motore | SI | SI |
| Carico nominale del cuscinetto | 153N | 153N |
| Peso del motore | 137g | 137g |
| Consiglia di azionamento | DF40V2 | DF40V2 |
| Tensione di ingresso dell'azionamento | 7.4-32V | 7.4-32V |
| Comunicazione | RS485 O CAN | RS485 O CAN |
| Frequenza di comunicazione | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder magnetico a 18 bit | Encoder magnetico a 18 bit |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia(24KHz)/Loop di velocità(8KHz)/Loop di posizione(8KHz) | Loop di coppia(24KHz)/Loop di velocità(8KHz)/Loop di posizione(8KHz) |
| Curva di accelerazione | Accelerazione trapezoidale | Accelerazione trapezoidale |
Disegno di installazione (Dimensioni chiave)
- Marcature di diametro: Ø44.4, Ø44, Ø25
- Marcatura dell'albero/foro: Ø12.7H7 profondità 16.5
- Marcatura del diametro del corpo: Ø49 (-0.10), Ø49 (-0.05)
- Marcature di lunghezza: 28.9 ±0.10, 17.5
- Fori di montaggio: 4-M2.5 profondità 8; 6-M2.5 profondità 3; 4-M3 profondità 3.5
- Marcatura di lunghezza aggiuntiva: 20
Manuali / Documenti
Per assistenza su cablaggio, integrazione e ordinazione (inclusa la selezione del drive DF40V2 e la configurazione RS485/CAN), contattare [email protected] or visitare https://rcdrone.top/.
Dettagli

Progettato per giunti robotici compatti, MF5010 V2 combina un design del motore integrato con comunicazione RS485/CAN e un encoder aggiornato.
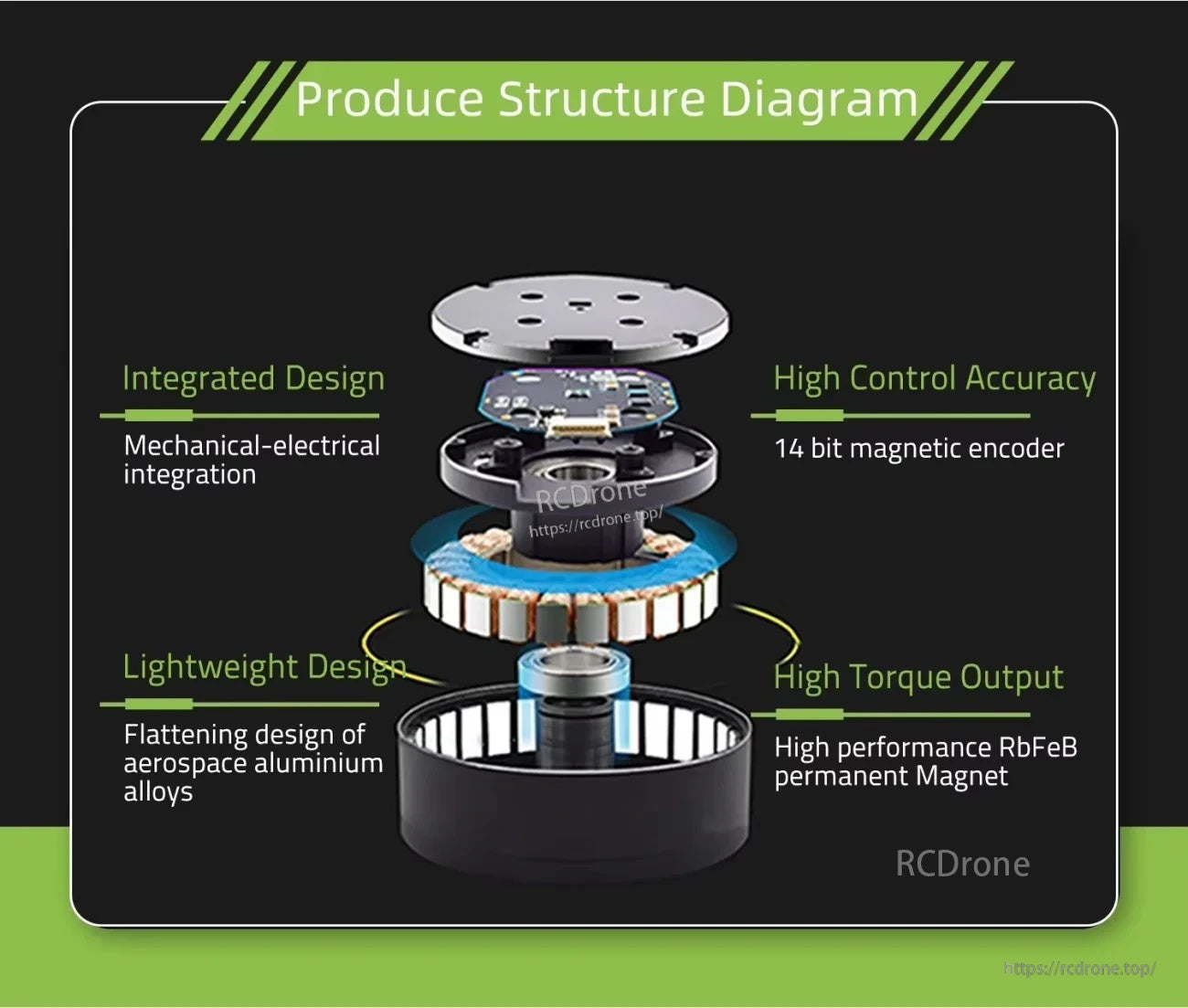
Una struttura meccanico-elettrica integrata aiuta a mantenere il peso ridotto mentre supporta un controllo preciso e un'uscita di coppia.
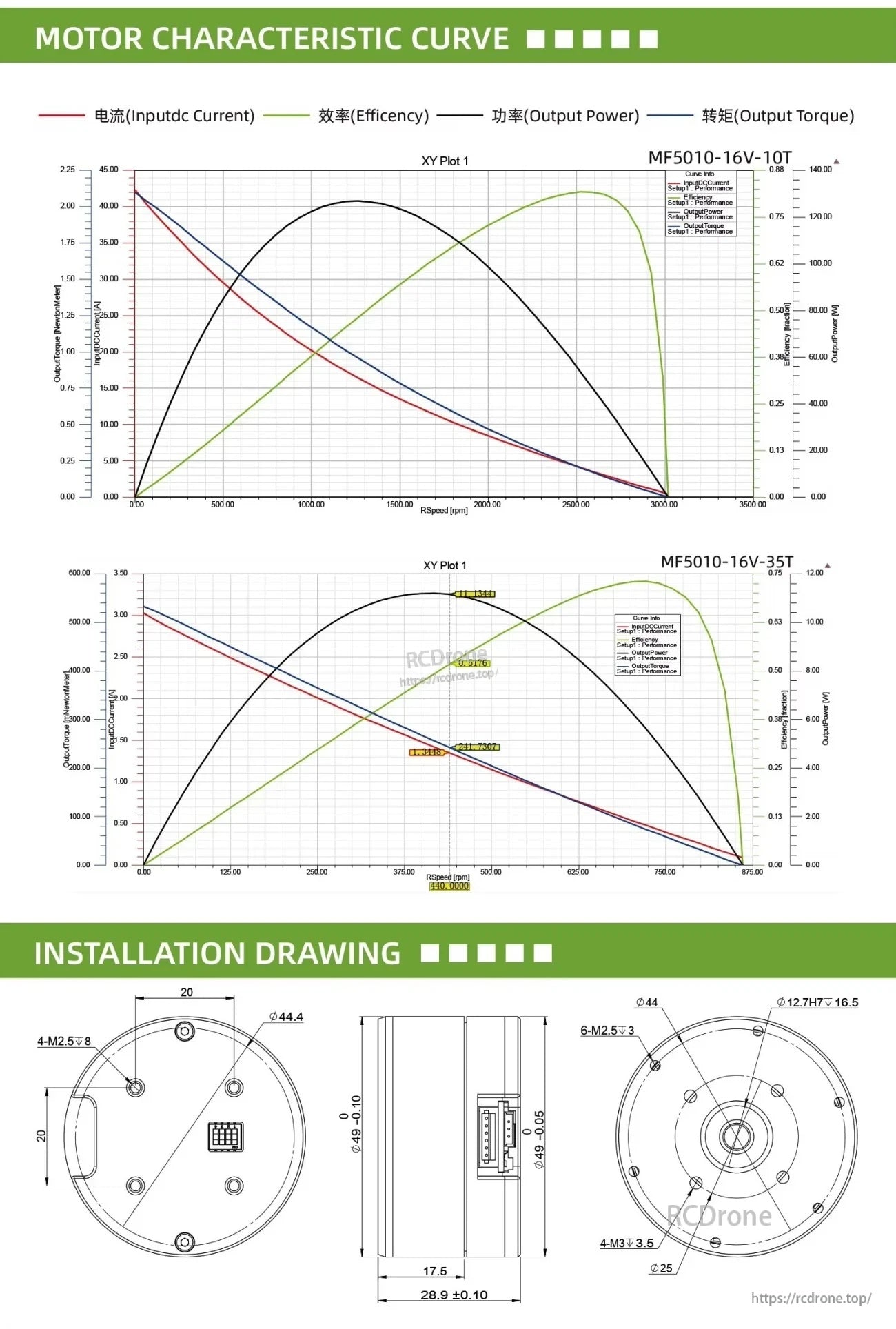
Le curve di riferimento e il disegno di installazione aiutano a abbinare l'opzione di avvolgimento da 10T o 35T alle vostre esigenze di velocità/coppia e disposizione di montaggio.

Related Collections



