



Motore LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Encoder 18-bit, Driver DF70V2 per Robot
Motore LKMTECH MF7010-V2 24V (23T/45T) RS485/CAN Encoder 18-bit, Driver DF70V2 per Robot
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
Il LKMTECH MF7010-V2 Motore è un motore per giunti di robotica e automazione, che offre comunicazione RS485 o CAN (con il driver DF70V2 raccomandato) e un encoder magnetico integrato. È specificato in due opzioni di avvolgimento (23 giri / 45 giri), entrambi con una tensione nominale di 24V, con supporto per la temperatura del motore e un encoder magnetico a 18 bit.
Caratteristiche principali
- Design integrato con integrazione meccanico-elettrica
- Alta precisione di controllo (encoder magnetico a 14 bit è citato nel materiale delle caratteristiche)
- Alta coppia di uscita con magnete permanente RbFeB ad alte prestazioni (formulazione del materiale delle caratteristiche)
- Design leggero con design appiattito di leghe di alluminio aerospaziale (formulazione del materiale delle caratteristiche)
- Design a rotore esterno
- Design ad arco multi-stadio con magnete permanente
- Gap d'aria più piccolo; magnetizzazione radiale
- 0.2 mm foglio di acciaio al silicio
- Filo smaltato isolato classe H
- Materiale NdFeB di grado SH (parole chiave del materiale)
- Software di programma fornito per regolare i parametri, testare e aggiornare; supporta lo sviluppo open source come PC, MCU, PLC, ICP e RPi
Applicazioni
- Robot umanoidi
- Bracci robotici
- esoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
- Camera PTZ
- Sistemi Laser LiDAR
- Robot per ispezione di centrali elettriche
- Attrezzature per ispezione industriale
Specifiche
| Parametro | MF7010-V2 (23 giri) | MF7010-V2 (45 giri) |
|---|---|---|
| Nome dell'articolo | MF7010-V2 | MF7010-V2 |
| Giri | 23 | 45 |
| Tensione nominale | 24V | 24V |
| Velocità massima | 1230 RPM | 620 RPM |
| Momento torcentale nominale | 0.61 N.m | 0.63 N.m |
| Velocità nominale | 940 RPM | 400 RPM |
| Corrente nominale | 3.3 A | 1.75 A |
| Potenza massima | 104 W | 31 W |
| Momento torcentale massimo | 2 N.m | 2.1 N.m |
| Costante di velocità | 39 rpm/V | 16.7 rpm/V |
| Costante di coppia | 0.18 N.m/A | 0.36 N.m/A |
| Tipo di avvolgimento | Y | Y |
| Resistenza di fase | 0.71 ohm | 2.73 ohm |
| Induttanza di fase | 0.86 mH | 3.3 mH |
| Poli del motore | 28 | 28 |
| Inerzia del rotore | 748 gcm^2 | 748 gcm^2 |
| Temperatura del motore | SI | SI |
| Carico nominale del cuscinetto | 330 N | 330 N |
| Peso del motore | 278 g | 278 g |
| Consigliare il drive | DF70V2 | DF70V2 |
| Tensione di ingresso del drive | 7.4-32V | 7.4-32V |
| Comunicazione | RS485 o CAN | RS485 o CAN |
| Frequenza di comunicazione | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) | RS485: 500 Hz (115200 bps) / CAN: 2 kHz (1 Mbps) |
| Encoder | Encoder magnetico a 18 bit | Encoder magnetico a 18 bit |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1 Mbps, 2 Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia (24 kHz) / Loop di velocità (8 kHz) / Loop di posizione (8 kHz) | Loop di coppia (24 kHz) / Loop di velocità (8 kHz) / Loop di posizione (8 kHz) |
| Curva di accelerazione | Accelerazione trapezoidale | Accelerazione trapezoidale |
Manuali
Per domande di compatibilità pre-vendita (selezione del drive, configurazione RS485/CAN, configurazione del baudrate) o aiuto con la documentazione, contattare [email protected] or visitare https://rcdrone.top/ .
Dettagli
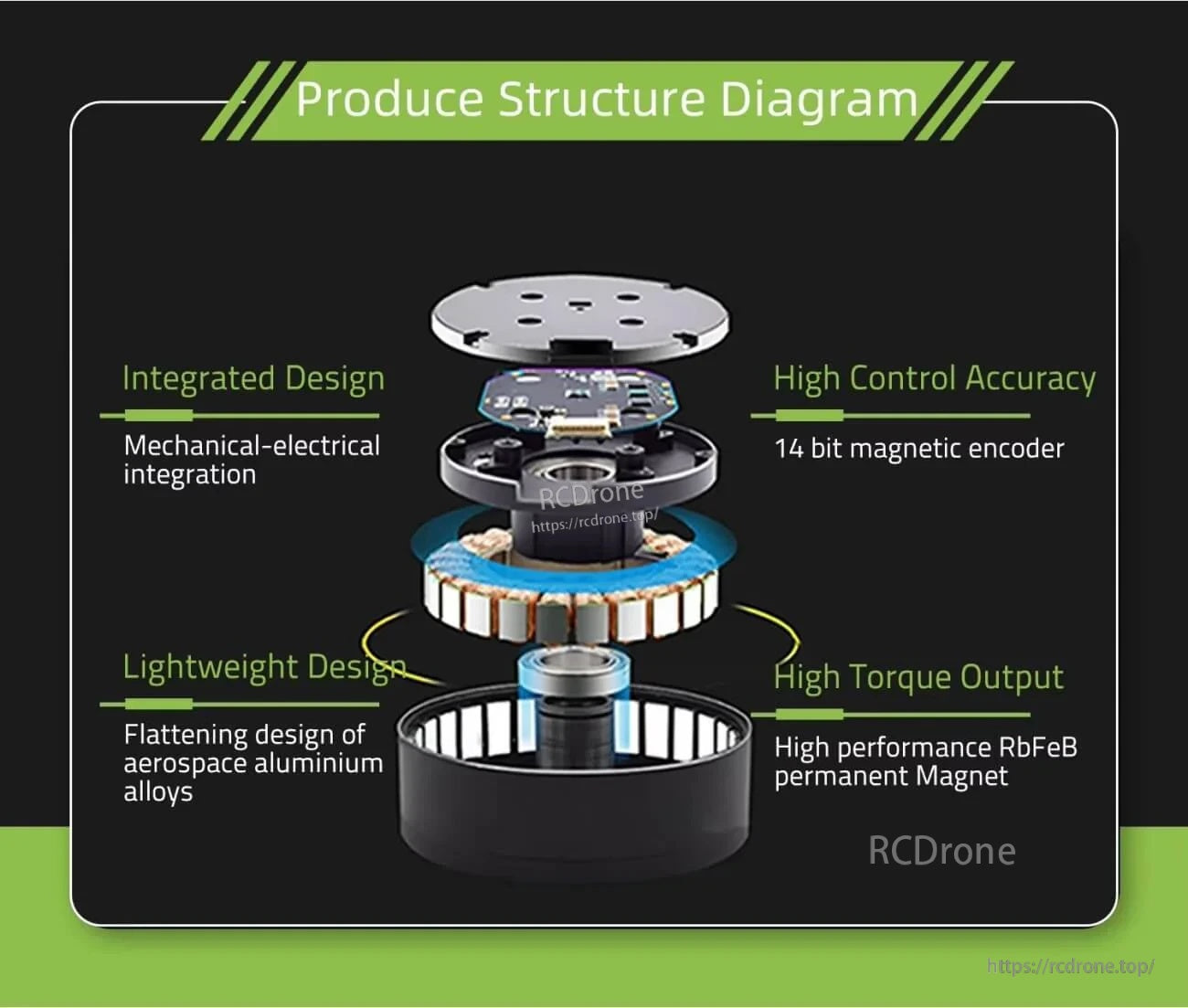
La costruzione meccanico-elettrica integrata mantiene l'attuatore compatto mentre supporta un controllo di retroazione preciso per le articolazioni dei robot.
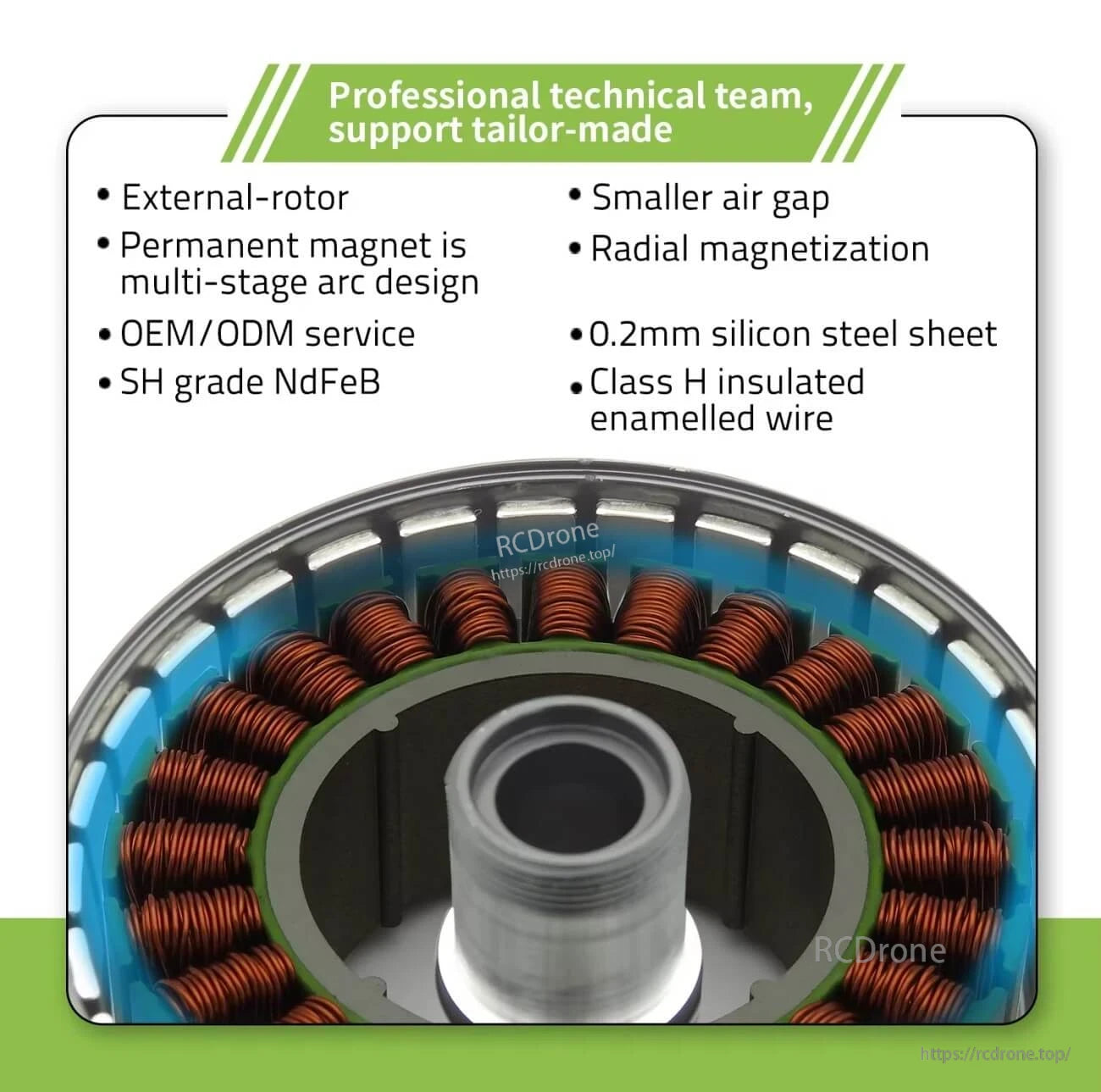
Il layout del rotore esterno e il design con gap d'aria ridotto aiutano a fornire una coppia reattiva in un formato di motore per articolazioni leggero.
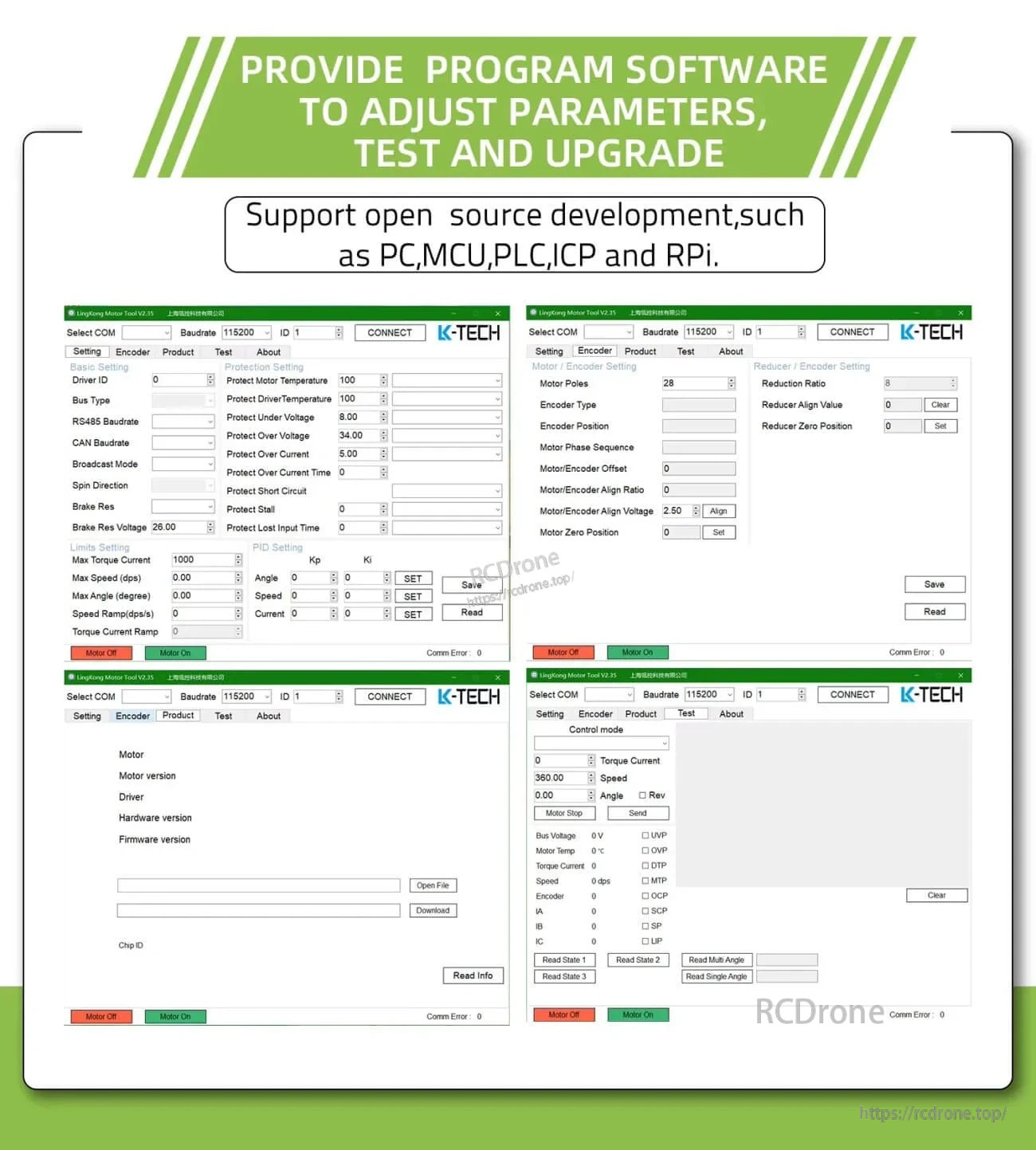
Il software per PC è disponibile per la configurazione dei parametri, diagnosi e aggiornamenti del firmware quando utilizzato con il drive DF70V2 raccomandato.

Related Collections



