



Motore LKMTECH MF9025-V2 (MF9025v2) Servo Motore Integrato 24V, Encoder 18-bit, RS485/CAN, Drive DF70
Motore LKMTECH MF9025-V2 (MF9025v2) Servo Motore Integrato 24V, Encoder 18-bit, RS485/CAN, Drive DF70
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
LKMTECH Il motore MF9025-V2 (MF9025v2) è una soluzione motore integrata progettata per costruzioni leggere, alta precisione di controllo e alta coppia. Le note di aggiornamento MF v2 includono un aggiornamento della risoluzione dell'encoder da 14 bit a 18 bit, ottimizzazione della coppia di cogging, supporto per input PWM e comunicazione CAN/RS485 con più velocità di baud.
Caratteristiche principali
- Design integrato; design leggero; alta precisione di controllo; alta coppia in uscita
- Risoluzione dell'encoder: 14-bit aggiornato a 18-bit (aggiornamento MF v2)
- Ottimizzazione della coppia di cogging (aggiornamento MF v2)
- Supporta l'input PWM (aggiornamento MF v2)
- Opzioni di comunicazione: CAN o RS485
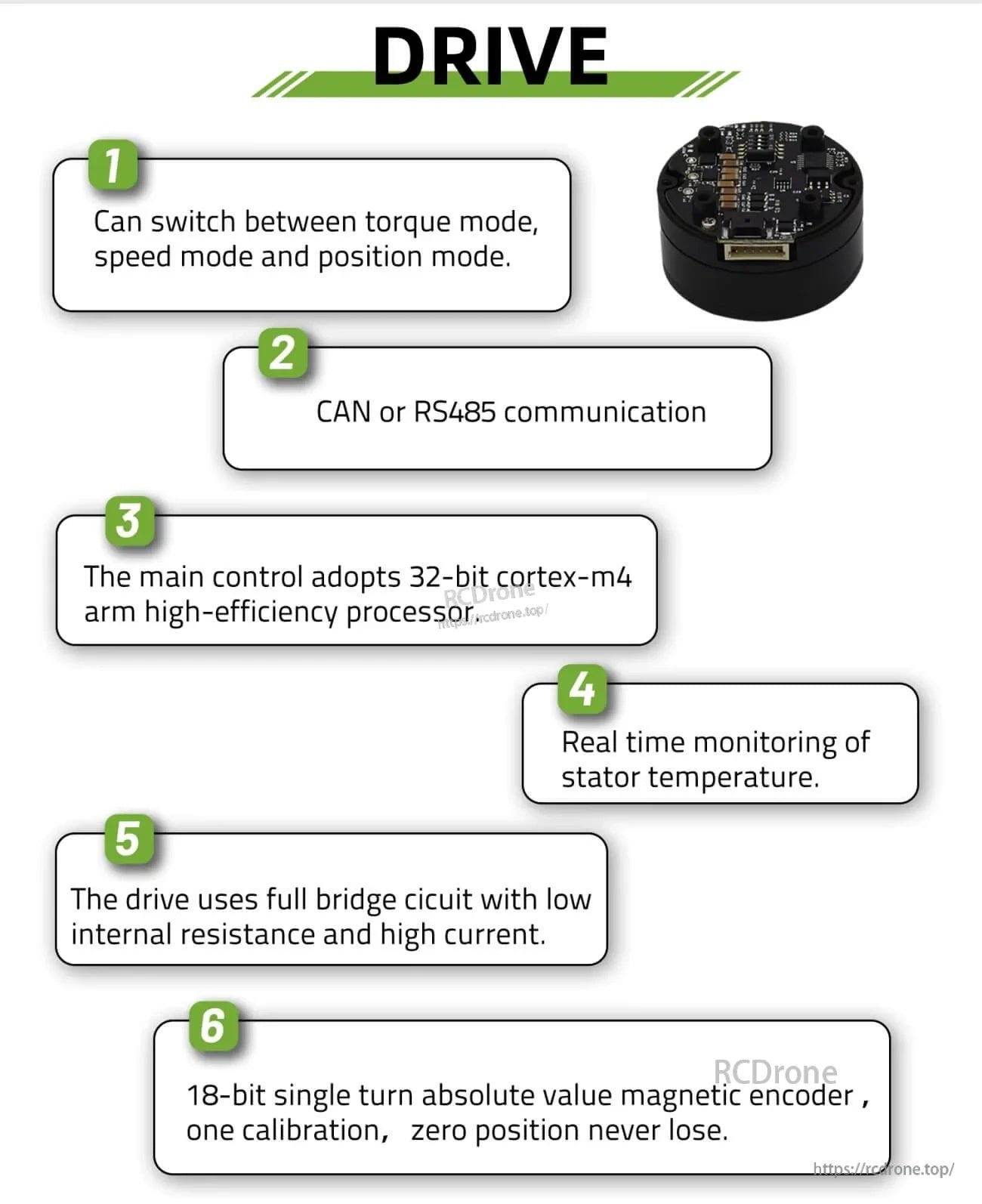
- Modalità di controllo: modalità coppia, modalità velocità e modalità posizione (commutabile)
- Monitoraggio in tempo reale della temperatura dello statore
- Controllo principale: processore ad alta efficienza Cortex-M4 ARM a 32 bit (testo delle caratteristiche di guida)
- Caratteristiche di guida: circuito a ponte completo con bassa resistenza interna e alta corrente (testo delle caratteristiche di guida)
- Encoder magnetico assoluto a singolo giro da 18-bit; una calibrazione; posizione zero mai persa (testo delle caratteristiche)
Per integrazione o conferma tecnica pre-vendita, contattare [email protected] or visita https://rcdrone.top/.
Specifiche Tecniche
La tabella sottostante elenca due opzioni di avvolgimento MF9025v2 (Giri: 16 e 35).
| Parametro | MF9025v2 (16 Giri) | MF9025v2 (35 Giri) |
|---|---|---|
| Nome dell'Articolo | MF9025v2 | MF9025v2 |
| Giri | 16 | 35 |
| Voltaggio Nominale | 24V | 24V |
| Velocità Massima | 710RPM | 280RPM |
| Momento Torcentale Nominale | 2.42 N.m | 2.79 N.m |
| Velocità Nominale | 490RPM | 130RPM |
| Corrente Nominale | 7.45A | 3.46A |
| Potenza Massima | 170W | 38W |
| Momento Torcentale Massimo | 4.5 N.m | 5.8 N.m |
| Velocità costante | 20 rpm/V | 5.4 rpm/V |
| Coppia costante | 0.32 N.m/A | 0.81 N.m/A |
| Tipo di avvolgimento | Y | Y |
| Resistenza di fase | 0.5 ohm | 1.9 ohm |
| Induttanza di fase | 0.96mH | 4.71mH |
| Poli del Motore | 28 | 28 |
| Inerzia del rotore | 4656 gcm^2 | 4656 gcm^2 |
| Temperatura del Motore | SI | SI |
| Carico Nominale del Cuscinetto | 650N | 650N |
| Peso del Motore | 963g | 963g |
| Consiglia Drive | DF70 | DF70 |
| Tensione di ingresso del Drive | 7.4-32V | 7.4-32V |
| Comunicazione | RS485 o CAN | RS485 o CAN |
| Frequenza di comunicazione | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | Encoder magnetico a 18 bit | Encoder magnetico a 18 bit |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia (24KHz) / Loop di velocità (8KHz) / Loop di posizione (8KHz) | Loop di coppia (24KHz) / Loop di velocità (8KHz) / Loop di posizione (8KHz) |
| Curva di accelerazione | Accelerazione trapezoidale | Accelerazione trapezoidale |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
- Camera PTZ
- Laser LiDAR
- Robot per ispezione di stazioni di energia
- Ispezione industriale
Curva caratteristica del motore
- Curve mostrate: MF9025-16T e MF9025-35T
- Legende del grafico: Corrente DC di ingresso, Efficienza, Potenza di uscita, Coppia di uscita
Manuali / Documenti
Dettagli

MF9025v2 combina il motore e l'azionamento in un pacchetto servo integrato compatto, aggiornato con feedback dell'encoder a 18 bit più opzioni di controllo PWM e CAN/RS485.
Modalità di controllo multiple (coppia, velocità, posizione) sono supportate, con comunicazione CAN o RS485 e monitoraggio in tempo reale della temperatura dello statore per un controllo più preciso.
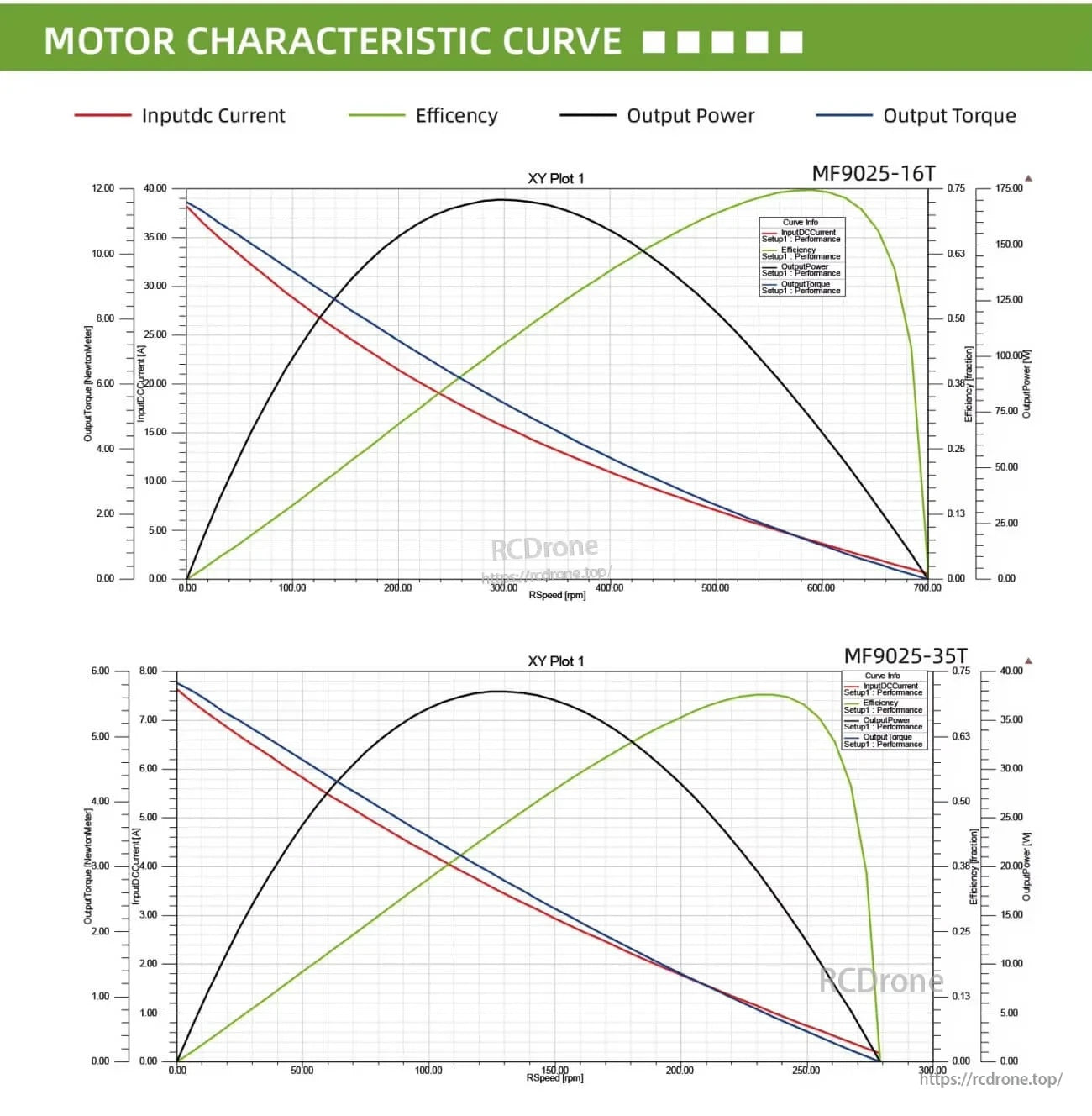
Le curve di prestazione confrontano le opzioni di avvolgimento a 16 e 35 giri in base a velocità, coppia, corrente, potenza ed efficienza.

Related Collections



