




LKMTECH MG4005E-i10-V3 Motore a ingranaggi planetari, 24V 1:10 PG4210, RS485/CAN Doppio Encoder
LKMTECH MG4005E-i10-V3 Motore a ingranaggi planetari, 24V 1:10 PG4210, RS485/CAN Doppio Encoder
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
Il LKMTECH MG4005E-i10-V3 Motore è un motore a ingranaggi planetari progettato per il movimento robotico e giunti di automazione che richiedono ingranaggi compatti, feedback a ciclo chiuso e comunicazione bus. Integra un riduttore a ingranaggi planetari (PG4210, 1:10) e doppi encoder magnetici assoluti (lato motore + lato riduttore) per un controllo preciso.
Caratteristiche principali
- Motore a ingranaggi planetari: alta potenza, grande coppia e alta precisione
- Motore senza spazzole + riduttore planetario ad alta precisione
- Controllo FOC (richiesta di drive/driver)
- Doppio encoder: encoder magnetico assoluto a singolo giro da 18 bit (lato motore) + encoder magnetico assoluto a singolo giro da 14 bit (lato riduttore)
- Encoder lato riduttore supporta l'uscita del valore assoluto di un singolo giro e ricorda il punto zero dopo lo spegnimento
- Comunicazione RS485 o bus CAN
- Supporta la regolazione dei parametri tramite software PC, test e aggiornamento del firmware
- Supporta piattaforme di sviluppo open source: PC, MCU, PLC, computer industriale e Raspberry Pi
- Modalità di controllo multiple supportate: Modalità di coppia, Modalità di velocità, Modalità di controllo multi-giro, Modalità di posizione + direzione a singolo giro, Modalità di posizione incrementale, Modalità di controllo multi-giro (con limite di velocità), Modalità di posizione + direzione a singolo giro (con limite di velocità), Modalità di posizione incrementale (con limite di velocità)
- Interfacce del sensore di temperatura duali monitorano le temperature del motore e dell'azionamento in tempo reale
- Funzione freno riservata (Freno / Rilascio freno)
- Funzioni di protezione multiple elencate: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Per supporto all'integrazione e conferma pre-vendita, contattare https://rcdrone.top/ o inviare un'email a [email protected].
Specifiche
| Nome dell'articolo | MG4005E-i10-V3 |
| Voltaggio nominale | 24V |
| Velocità massima | 320RPM |
| Momento torcentale nominale | 1 N.m |
| Velocità nominale | 255RPM |
| Corrente nominale | 1.8A |
| Potenza massima | 65W |
| Momento torcentale massimo | 2.5 N.m |
| Costante di velocità | 106.3rpm/V |
| Costante di momento torcentale | 0.06 N.m/A |
| Giri | 28 |
| Tipo di avvolgimento | Y |
| Resistenza di fase | 1.4Ω |
| Induttanza di fase | 0.5mH |
| Poli del Motore | 28 |
| Inerzia del rotore | 140gcm² |
| Temperatura del Motore | SÌ |
| Tipo di Riduttore | PG4210 |
| Rapporto di Riduzione | 1:10 |
| Gioco | ≤10 arcmin |
| Carico Nominale del Cuscinetto | 1000N |
| Peso del Motore | 183g |
| Consiglia Drive | DG40E |
| Tensione di ingresso del Drive | 7.4-32V |
| Comunicazione | RS485 o CAN |
| Frequenza di comunicazione | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | Encoder magnetico a 18 bit (motore) + 14 bit (riduttore) |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia (24KHz) / Loop di velocità (8KHz) / Loop di posizione (4KHz) |
| Curva di accelerazione | Accelerazione trapezoidale |
Definizione dell'interfaccia
| Interfaccia | Nota |
|---|---|
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| V- | Alimentazione Negativa |
| V+ | Alimentazione Positiva |
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND Segnale |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri / robot indossabili
- Robot quadrupedi / cane robot
- Veicoli AGV / auto AGV
- Robot ARU
Manuali / File
Dettagli

MG4005E-i10-V3 combina un motore senza spazzole con un riduttore planetario in una forma compatta per giunti robotici e assi di automazione.

Gli encoder magnetici assoluti a doppio giro forniscono feedback lato motore e lato uscita, con un interruttore ID dedicato per configurazioni bus.
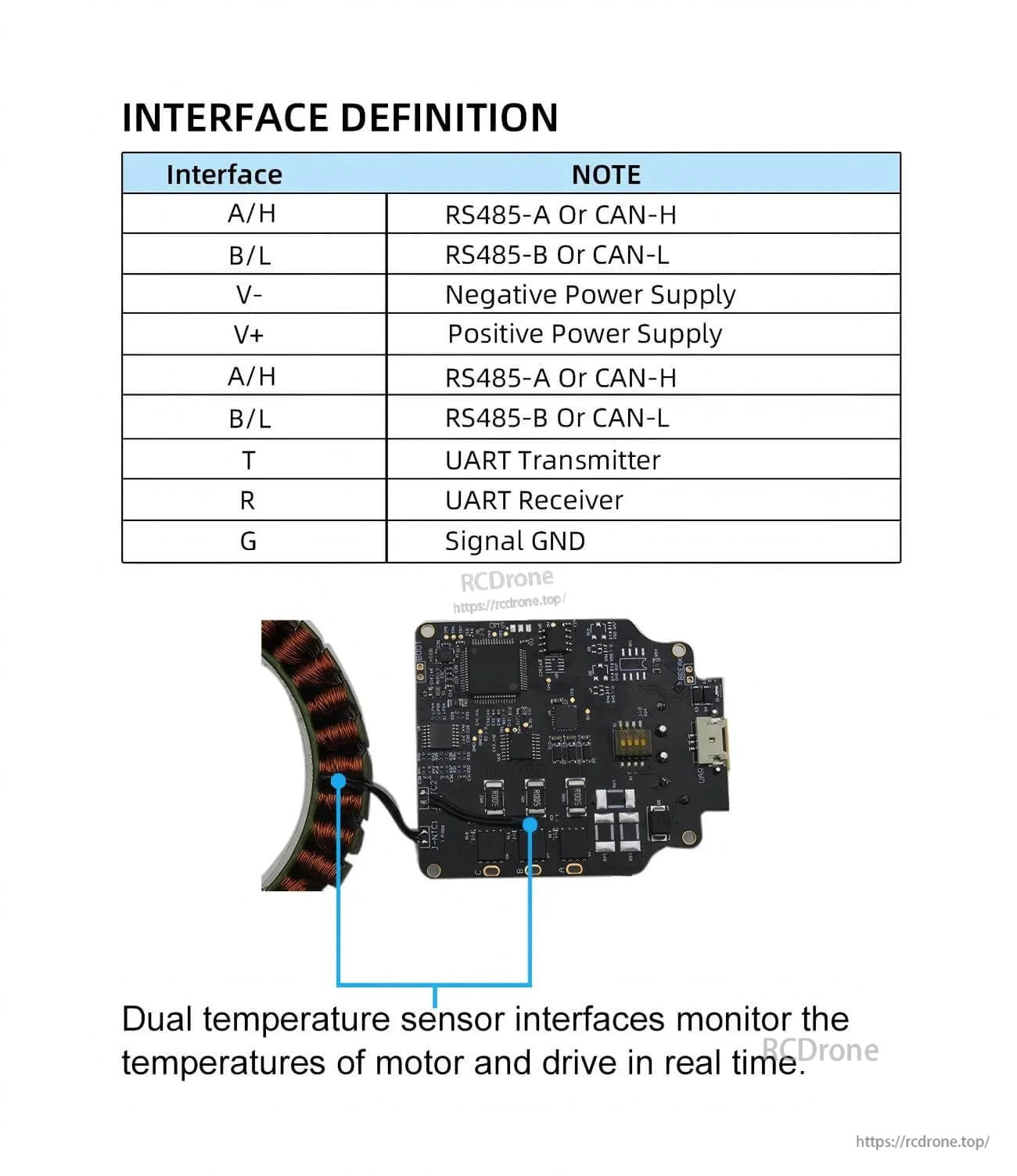
Il cablaggio è semplificato con terminali chiaramente definiti per alimentazione, comunicazione RS485/CAN e connessioni di segnale UART.
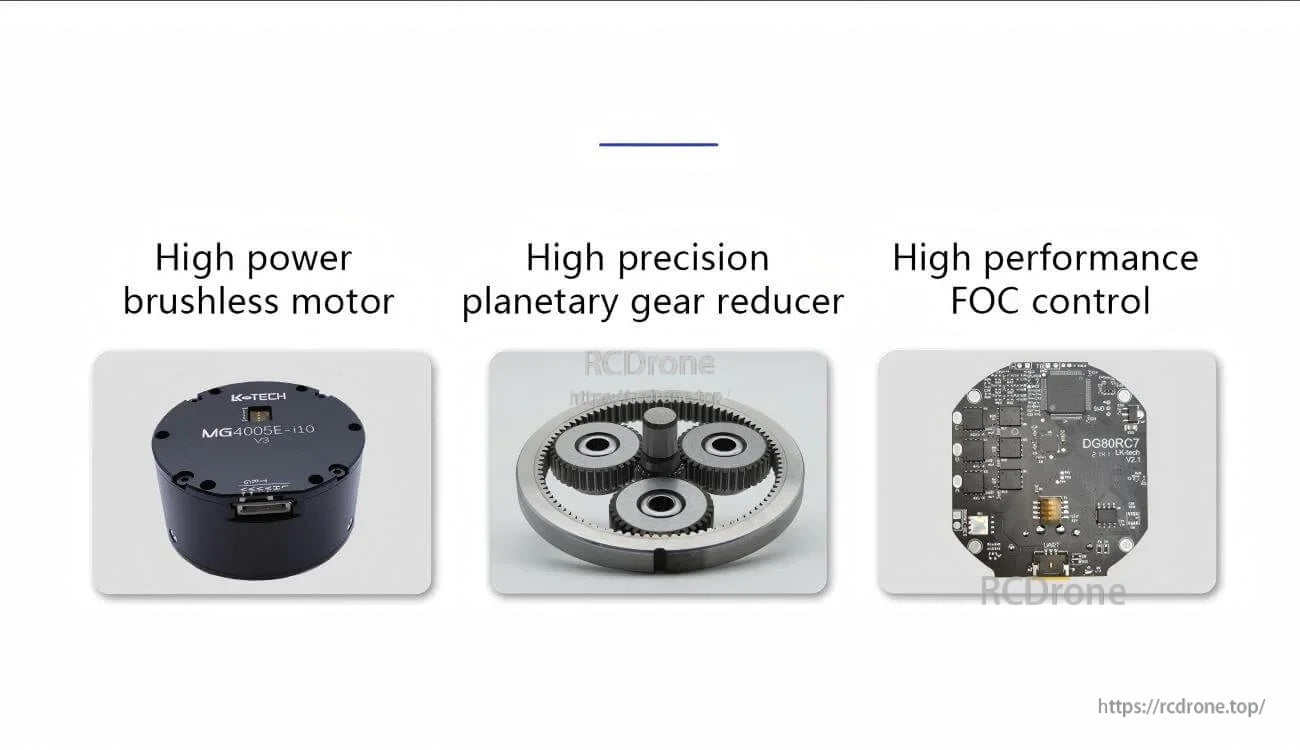
Un motore senza spazzole, un ingranaggio planetario di precisione e il controllo FOC supportano una consegna di coppia fluida e un controllo del movimento accurato.

Il drive supporta comunicazione RS485 o CAN e un ampio intervallo di tensione di ingresso (7.4–32V) per un'integrazione flessibile.
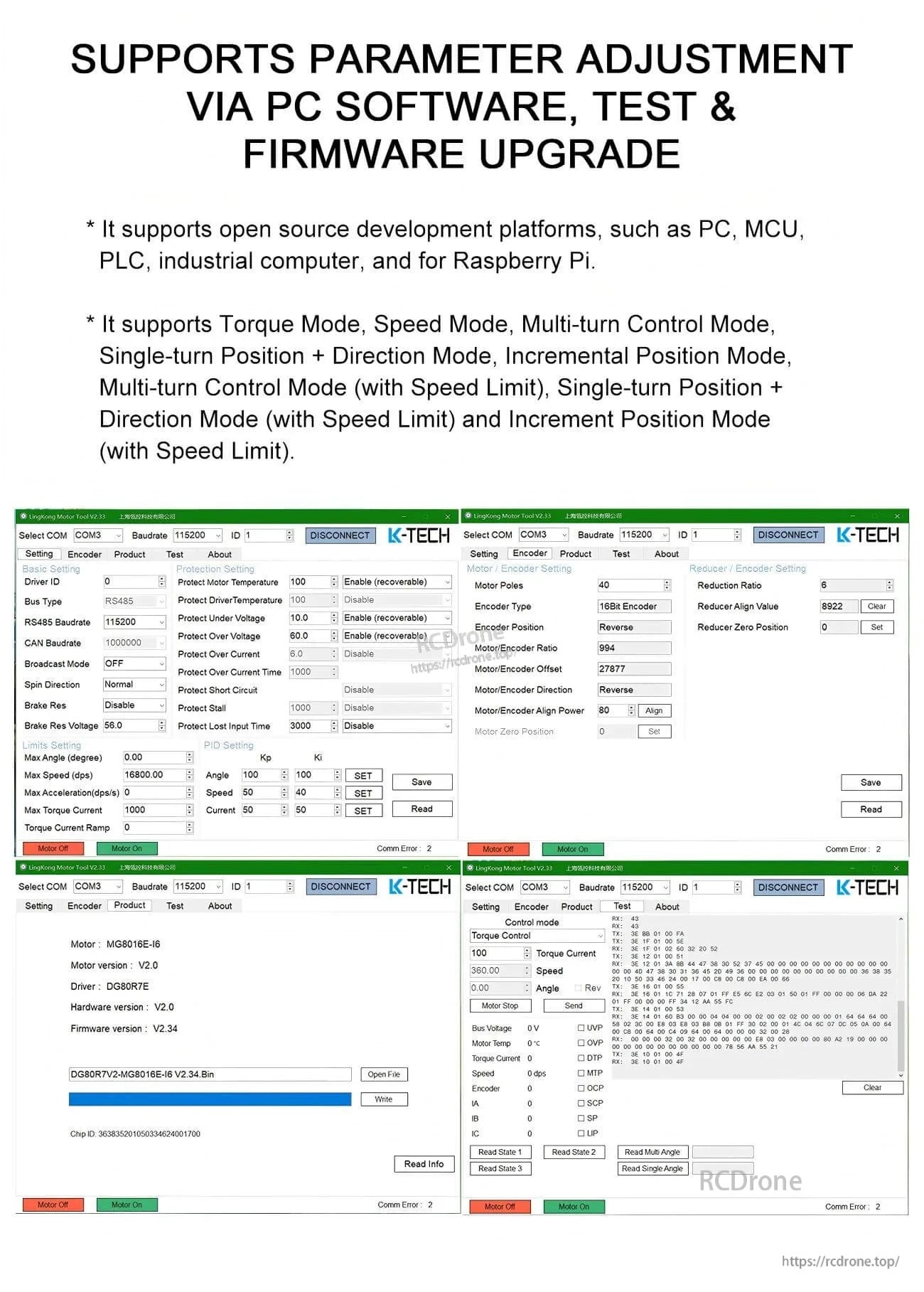
Il software per PC consente la regolazione dei parametri, il collaudo funzionale e gli aggiornamenti del firmware durante la messa in servizio e la manutenzione.
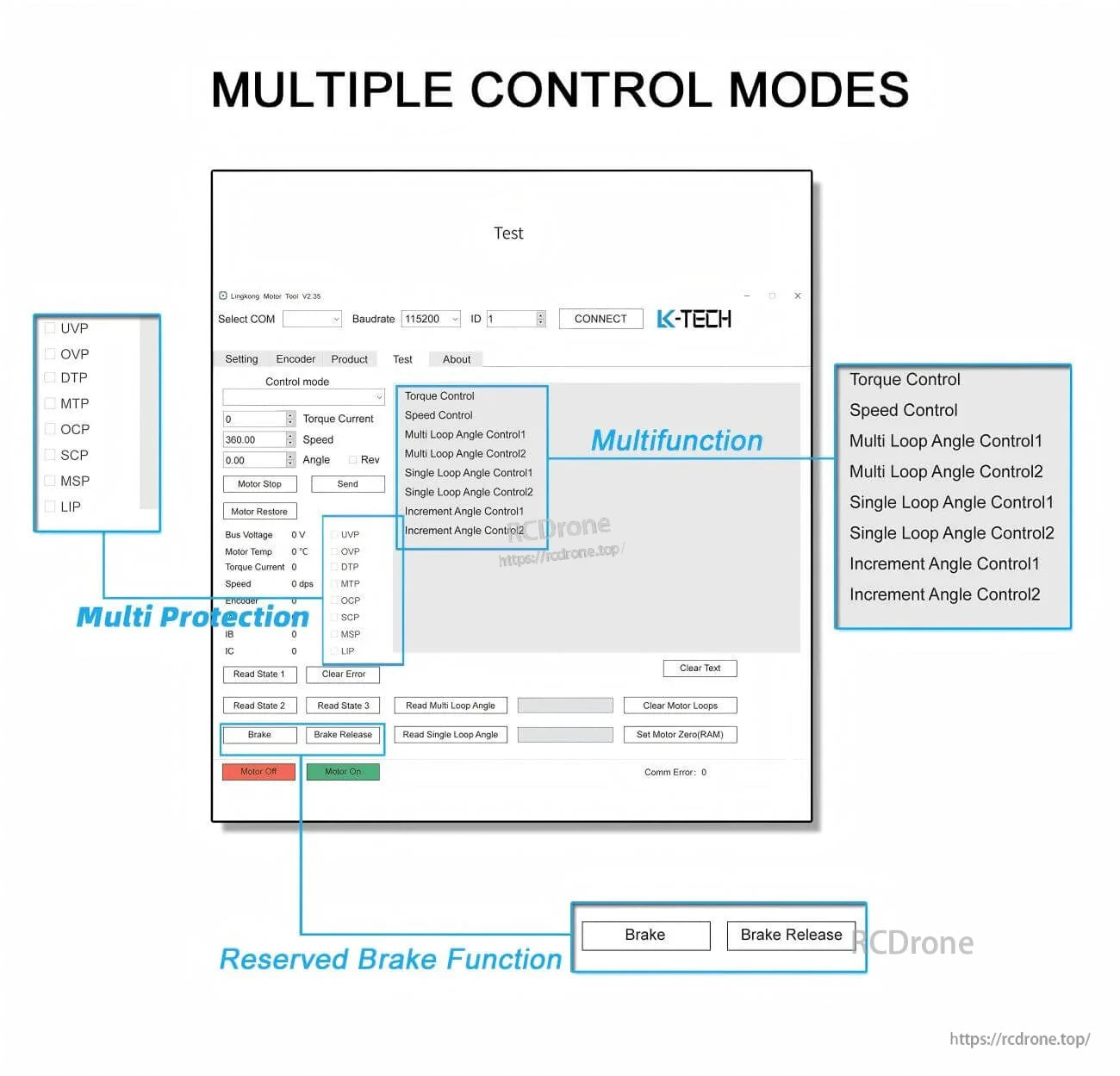
Scegli tra più modalità di controllo come controllo della coppia, della velocità e della posizione, con monitoraggio dello stato di protezione integrato.
Progettato per attuazione compatta in robot mobili, bracci articolati, quadrupedi e robotica indossabile.
Related Collections




