




LKMTECH MG4010E-i36-V3 Motore a Ingranaggi Planetari 24V 1:36 RS485/CAN Encoder Magnetico per Robotica
LKMTECH MG4010E-i36-V3 Motore a Ingranaggi Planetari 24V 1:36 RS485/CAN Encoder Magnetico per Robotica
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
Il LKMTECH MG4010E-i36-V3 Motore è un motore a ingranaggi planetari progettato per robotica e attuatori di controllo del movimento. Combina un motore senza spazzole, un riduttore planetario e un encoder magnetico, con opzioni di comunicazione elencate come RS485 o CAN.
Caratteristiche principali
- Motore a ingranaggi planetari (MG4010E-i36, V3).
- Rapporto di trasmissione: 1:36 (mostrato anche come “Rapporto di trasmissione 1:36”).
- Gioco degli ingranaggi: 7 arcmin (etichetta immagine) / 12 arcmin (tabella specifiche).
- Encoder: encoder magnetico assoluto a 18 bit a giro singolo (testo immagine); elencato anche come encoder magnetico a 18 bit (motore) + 14 bit (riduttore) (tabella specifiche).
- Comunicazione: RS485 o CAN.
- Driver FOC/Drive di riferimento (testo immagine: “Driver FOC ad alte prestazioni”).
- Freno integrato (testo immagine/etichetta UI).
- Parametri host/test/aggiornamenti firmware supportati (testo immagine).
Specifiche
| Nome dell'articolo | MG4010E-i36-V3 |
| Voltaggio nominale | 24V |
| Velocità massima | 90RPM |
| Velocità nominale | 77RPM |
| Corrente nominale | 2.4A |
| Potenza massima | 132W |
| Momento torcentale nominale | 6 N.m (tabella specifiche) / 9 N.m (etichetta immagine) |
| Momento torcentale massimo | 13 N.m (tabella specifiche) / 18 N.m (etichetta immagine) |
| Costante di velocità | 3 rpm/V |
| Costante di momento torcentale | 2.58 N.m/A |
| Giri | 14 |
| Tipo di avvolgimento | Y |
| Resistenza di fase | 0.68 Ω |
| Induttanza di fase | 0.25 mH |
| Poli del Motore | 28 |
| Inerzia del rotore | 158 gcm² |
| Temperatura del Motore | SI |
| Tipo di Riduttore | PG5336 |
| Rapporto di Riduzione | 1:36 |
| Gioco | ≤12 arcmin (tabella specifiche) / 6 arcmin (etichetta immagine) |
| Carico Nominale del Cuscinetto | 1120 N |
| Peso del Motore | 378 g |
| Consiglia Drive | DG40E |
| Tensione di ingresso del Drive | 12-24V (tabella specifiche) / 12-60V (etichetta immagine) |
| Comunicazione | RS485 O CAN |
| Frequenza di Comunicazione | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motore) + 14bit (riduttore) Encoder Magnetico |
| Velocità di Baud dell'Encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Velocità di Baud (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modalità di Controllo | Loop di Coppia (24 KHz) / Loop di Velocità (8 KHz) / Loop di Posizione (4 KHz) |
| Curva di Accelerazione | Accelerazione Trapezoidale |
| Dimensione del Motore | Φ 53*54.5 (etichetta immagine) |
Definizione dell'interfaccia
- Interruttore ID (etichetta immagine: “INTERRUTTORE ID”).
| Port | Istruzioni |
|---|---|
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| V- | Alimentazione Negativa |
| V+ | Alimentazione Positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND Segnale |
Scenari di Applicazione
- Robot Umani
- Bracci Robotici
- Eseoscheletri
- Robot Quadrupedi
- Veicoli AGV / auto AGV
- Robot ARU
- Cane Mecha
- Robot di Servizio
- Lidar Portatile
- Robot per Addestramento alla Riabilitazione
- Robot di Ispezione
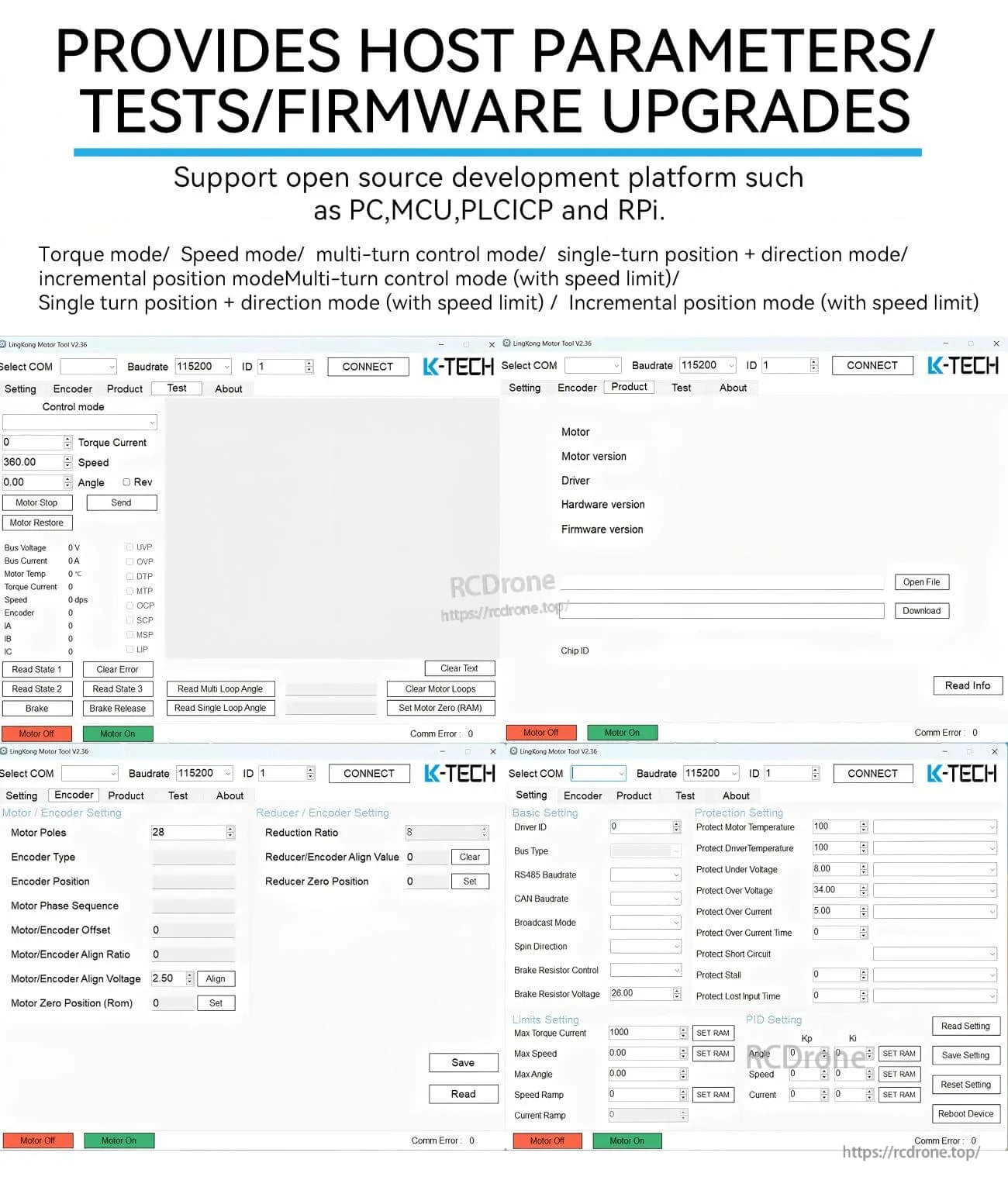
Controllo & Note sul Software
- Supporta piattaforme di sviluppo open source come PC, MCU, PLC, ICP e RPi.
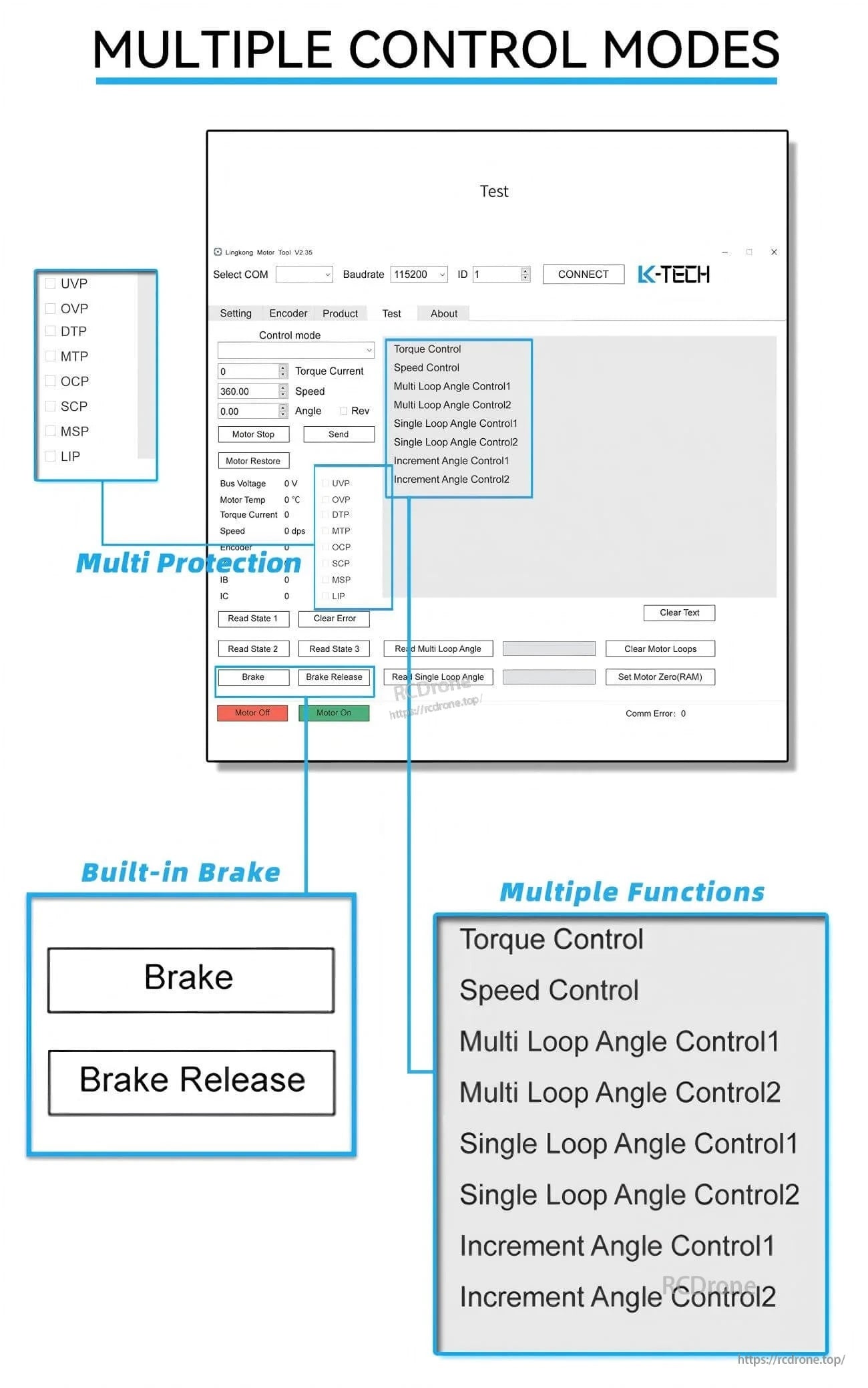
- Modalità elencate (testo immagine): Modalità coppia, Modalità velocità, modalità controllo multi-giro, modalità posizione + direzione singolo-giro, modalità posizione incrementale; sono mostrate anche versioni con limite di velocità.
- Multiple modalità di controllo mostrate nell'interfaccia utente: Controllo della coppia, Controllo della velocità, Controllo dell'angolo multi-loop1, Controllo dell'angolo multi-loop2, Controllo dell'angolo singolo-loop1, Controllo dell'angolo singolo-loop2, Controllo dell'angolo incrementale1, Controllo dell'angolo incrementale2.
- Etichette di protezione multiple mostrate: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Controlli del freno integrati mostrati: Freno, Rilascio del freno.
Per controlli di compatibilità pre-vendita (integrazione RS485/CAN, selezione della velocità di trasmissione) o aiuto per l'accesso ai file, contattare [email protected] or visitare https://rcdrone.top/.
Manuali / Documenti
Dettagli

Il MG4010E-i36-V3 combina un motore senza spazzole, un riduttore planetario e un encoder magnetico per attuatori robotici compatti.
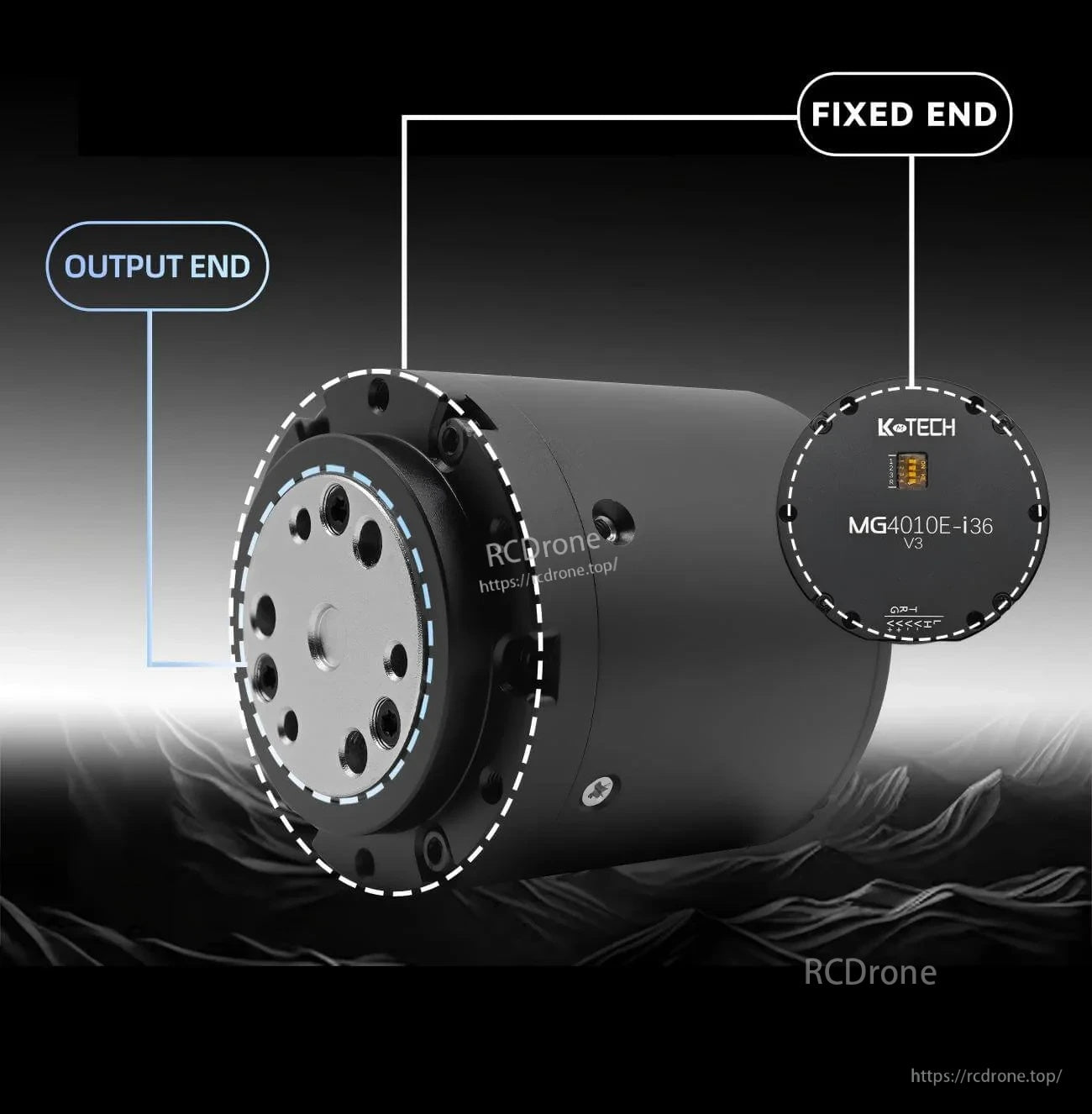
Un'estremità di uscita in stile flangia e un layout a estremità fissa facilitano l'integrazione in braccia, gambe e altri moduli articolati.

La comunicazione RS485 o CAN si abbina a un driver FOC e a un feedback di encoder magnetico assoluto per un controllo stabile di coppia, velocità e posizione.
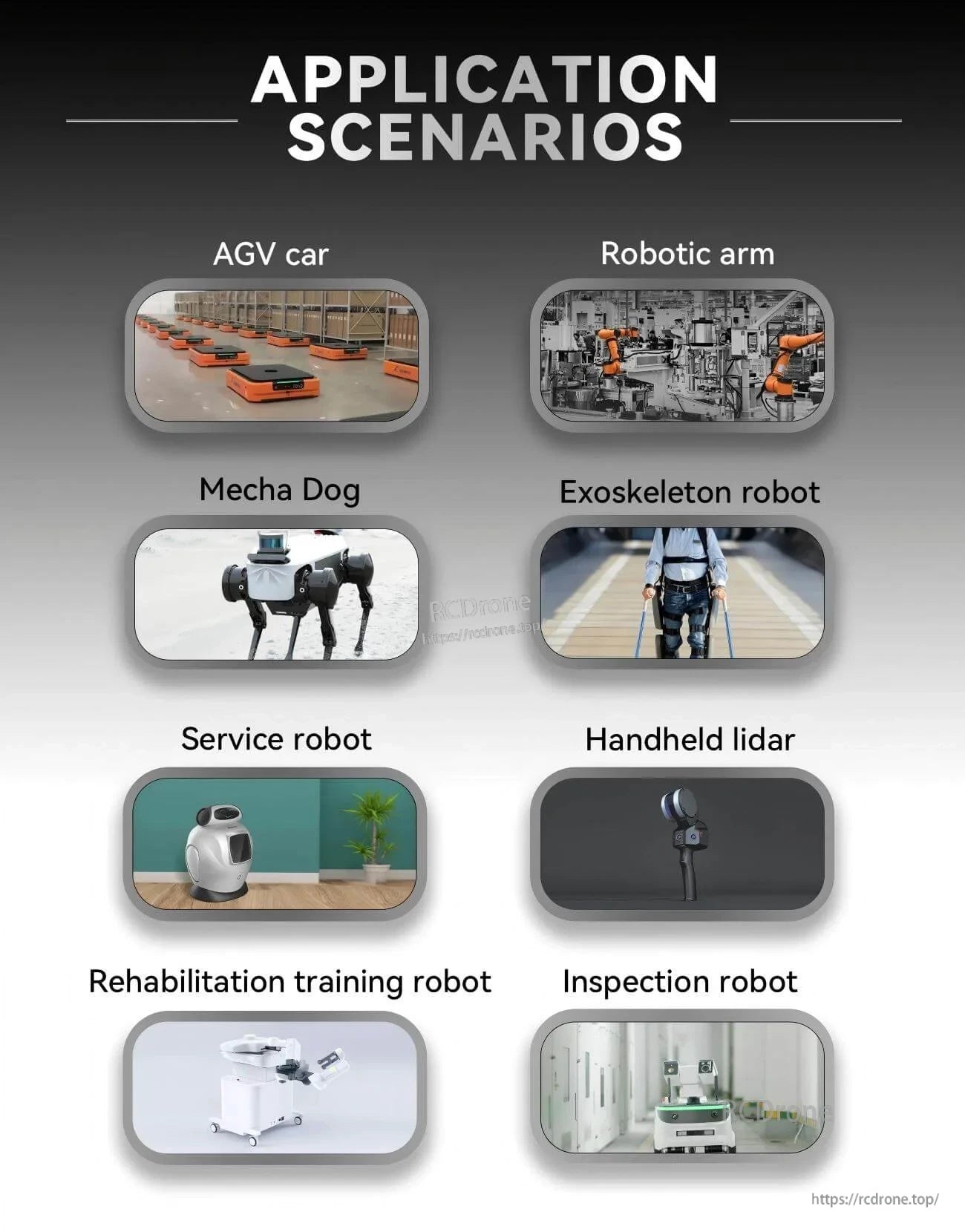
I casi d'uso comuni includono AGV, bracci robotici, piattaforme quadrupedi, esoscheletri e robot per ispezione o servizio.
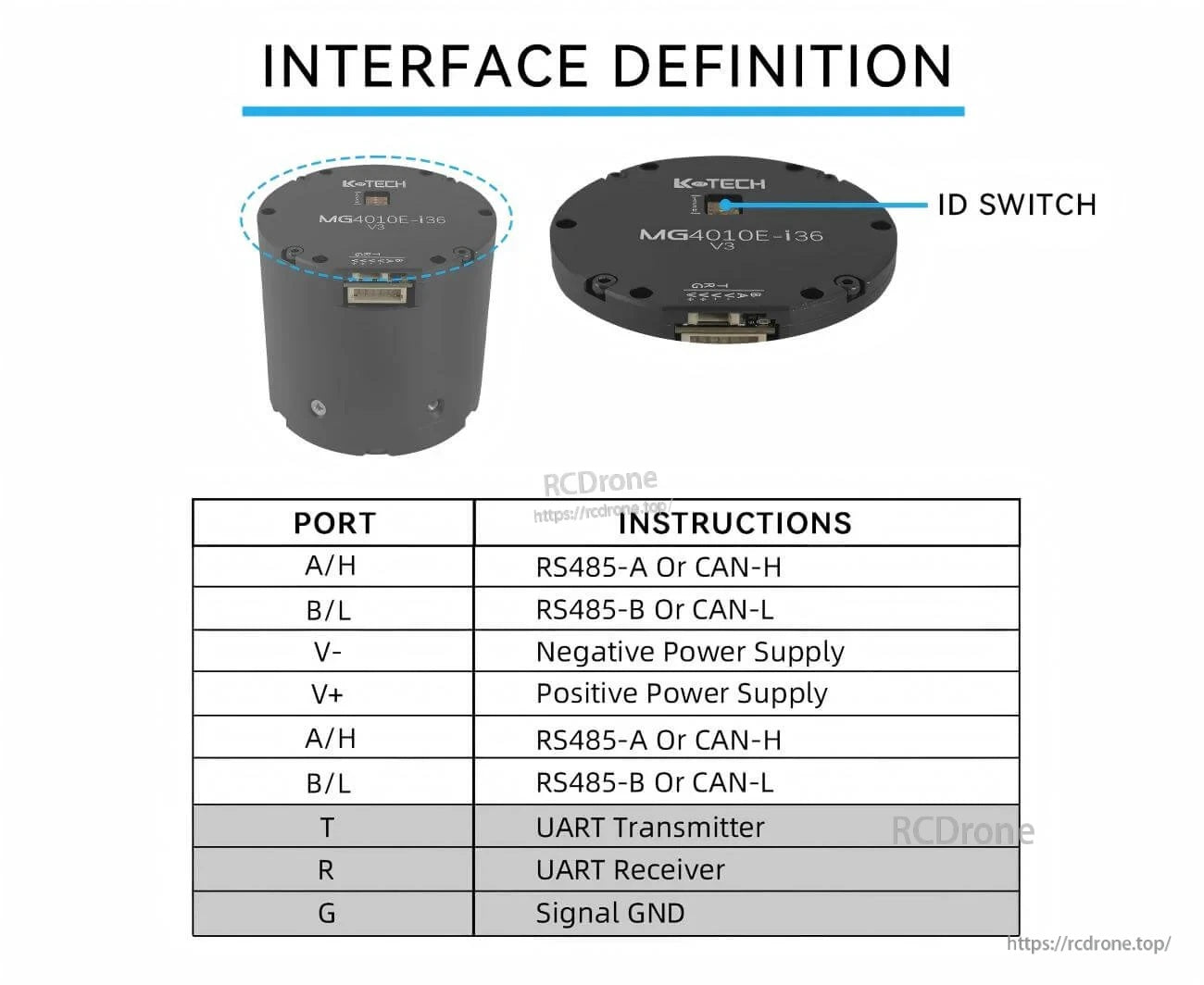
Il cablaggio è semplificato con pin del bus RS485/CAN etichettati, connessioni di alimentazione, UART Tx/Rx, massa del segnale e un interruttore ID a bordo.
Il controllo del freno integrato e le modalità operative multiple aiutano a sintonizzare il comportamento per diversi compiti di controllo del movimento e requisiti di sicurezza.
Related Collections




