




Motore LKMTECH MG6012-i36-V3 24V/48V 25N.m Riduttore planetario 1:36, RS485/CAN, Encoder 18bit
Motore LKMTECH MG6012-i36-V3 24V/48V 25N.m Riduttore planetario 1:36, RS485/CAN, Encoder 18bit
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
LKMTECH MG6012-i36-V3 Motore è un modulo motore brushless ad alta potenza con riduttore planetario e supporto per comunicazione encoder/drive per sistemi di movimento robotici. Il testo di posizionamento del prodotto include: “Massimo standard di design del prodotto”, “Alta Potenza in Uscita”, “Alto Momento Torcentale in Uscita” e “Alta Precisione”.
Scenari di applicazione
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV / auto AGV
- Robot ARU
- Cane robot
- Robot indossabile
Caratteristiche principali
- Motore brushless ad alta potenza
- Riduttore planetario ad alta precisione
- Driver FOC ad alte prestazioni (riferimento testuale)
- Voltaggio di ingresso: 12-60V
- Comunicazione: CAN o RS485
- Controllo principale: frequenza principale di 170M con ARM a 32 bit (riferimento testuale)
- Encoder: encoder assoluto a singolo anello da 18 bit / encoder magnetico da 18 bit (entrambi dichiarati)
- “Una calibrazione, posizione zero mai persa, non è necessario trovare il punto zero con la perdita di alimentazione.” (dichiarato)
- Interruttore ID (dichiarato)
- Interfaccia del sensore di temperatura duale; monitoraggio in tempo reale della temperatura del motore e del driver (dichiarato)
Specifiche
| Parametro | Versione 24V | Versione 48V |
|---|---|---|
| Nome dell'articolo | MG6012-i36-V3 | MG6012-i36-V3 |
| Tensione nominale | 24V | 48V |
| Velocità massima | 45RPM | 88RPM |
| Momento torcentale nominale | 25N.m | 25N.m |
| Velocità nominale | 45RPM | 74RPM |
| Corrente nominale | 4A | 4.8A |
| Potenza massima | 140W | 500W |
| Momento torcentale massimo | 40N.m | 40N.m |
| Velocità costante | 67rpm/V | 67rpm/V |
| Costante di coppia | 0.175N.m/A | 0.146N.m/A |
| Giri | 15 | 15 |
| Tipo di avvolgimento | Y | Y |
| Resistenza di fase | 0.63Ω | 0.63Ω |
| Induttanza di fase | 0.28mH | 0.28mH |
| Poli del motore | 28 | 28 |
| Inerzia del rotore | 930 | 908 |
| Temperatura del motore | SI | SI |
| Tipo di riduttore | PG4136 | PG4136 |
| Rapporto di riduzione | 1:36 | 1:36 |
| Gioco | ≤12 arcmin | ≤12 arcmin |
| Carico nominale del cuscinetto | 1770N | 1770N |
| Peso del motore | 503g | 503g |
| Consiglia di azionamento | DG60 | DG60 |
| Voltaggio di ingresso dell'azionamento | 12-60V | 12-60V |
| Comunicazione | RS485 O CAN | RS485 O CAN | Frequenza di comunicazione | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder magnetico a 18 bit | Encoder magnetico a 18 bit |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia(32KHz)/Loop di velocità(8KHz)/Loop di posizione(4KHz) | Loop di coppia(32KHz)/Loop di velocità(8KHz)/Loop di posizione(4KHz) |
| Curva di accelerazione | Accelerazione trapezoidale | Accelerazione trapezoidale |
Definizione dell'interfaccia
CAN/RS485 e interruttore ID sono forniti (dichiarato). Note dell'interfaccia:
| Interfaccia | Nota |
|---|---|
| A/H | RS485-A o CAN-H |
| B/L | RS485-B o CAN-L |
| V- | Alimentazione negativa |
| V+ | Alimentazione positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND segnale |
Manuali / Documenti
Per domande di integrazione (configurazione CAN/RS485, selezione della velocità di baud o accoppiamento del controller), contattare [email protected] or visita https://rcdrone.top/.
Dettagli

Il MG6012-i36-V3 integra un motore, riduttore planetario senza spazzole e comunicazioni con encoder per giunti robotici.
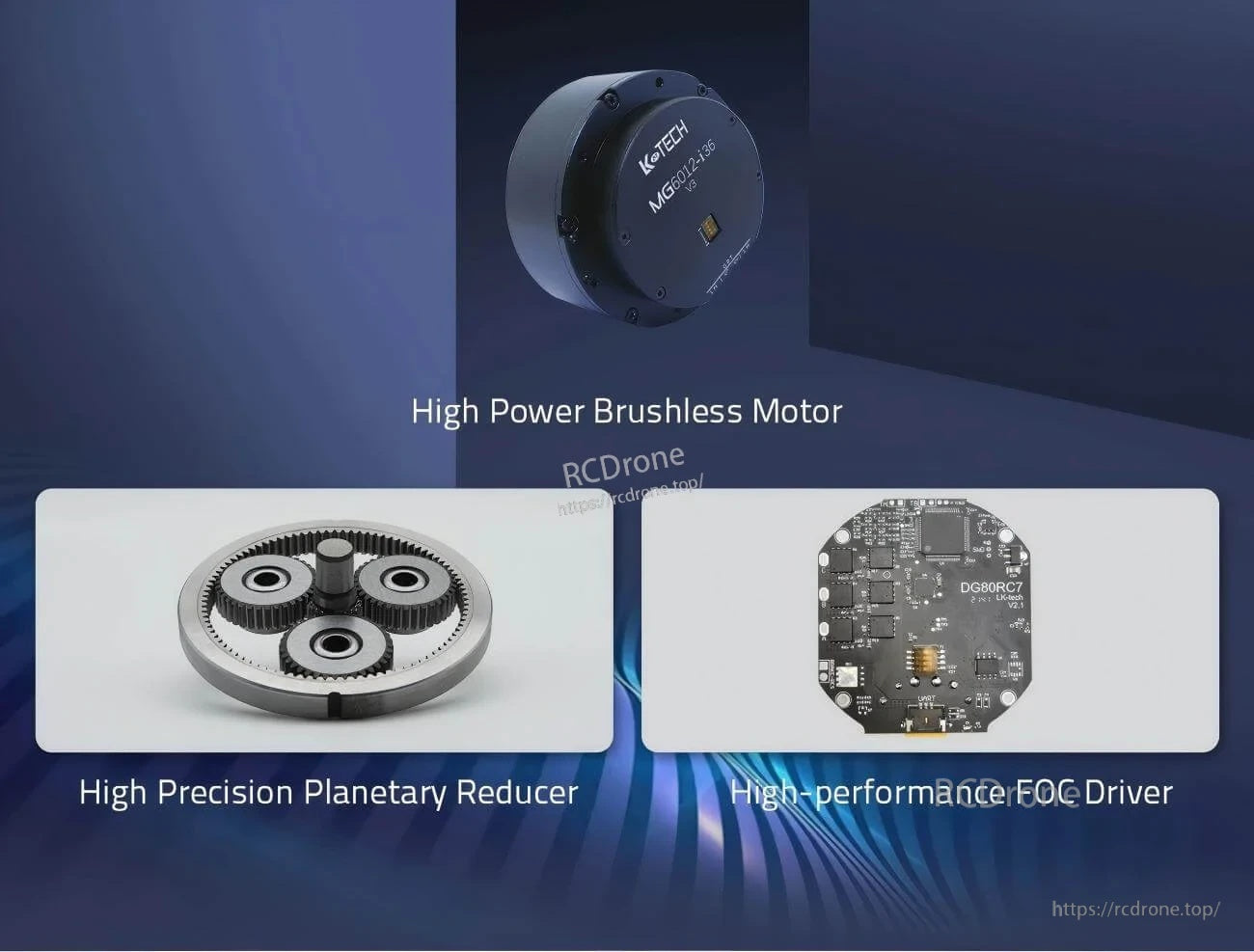 Un sistema di azionamento compatto costruito attorno a un nucleo di motore ad alta potenza, riduzione planetaria di precisione e un driver FOC.
Un sistema di azionamento compatto costruito attorno a un nucleo di motore ad alta potenza, riduzione planetaria di precisione e un driver FOC.
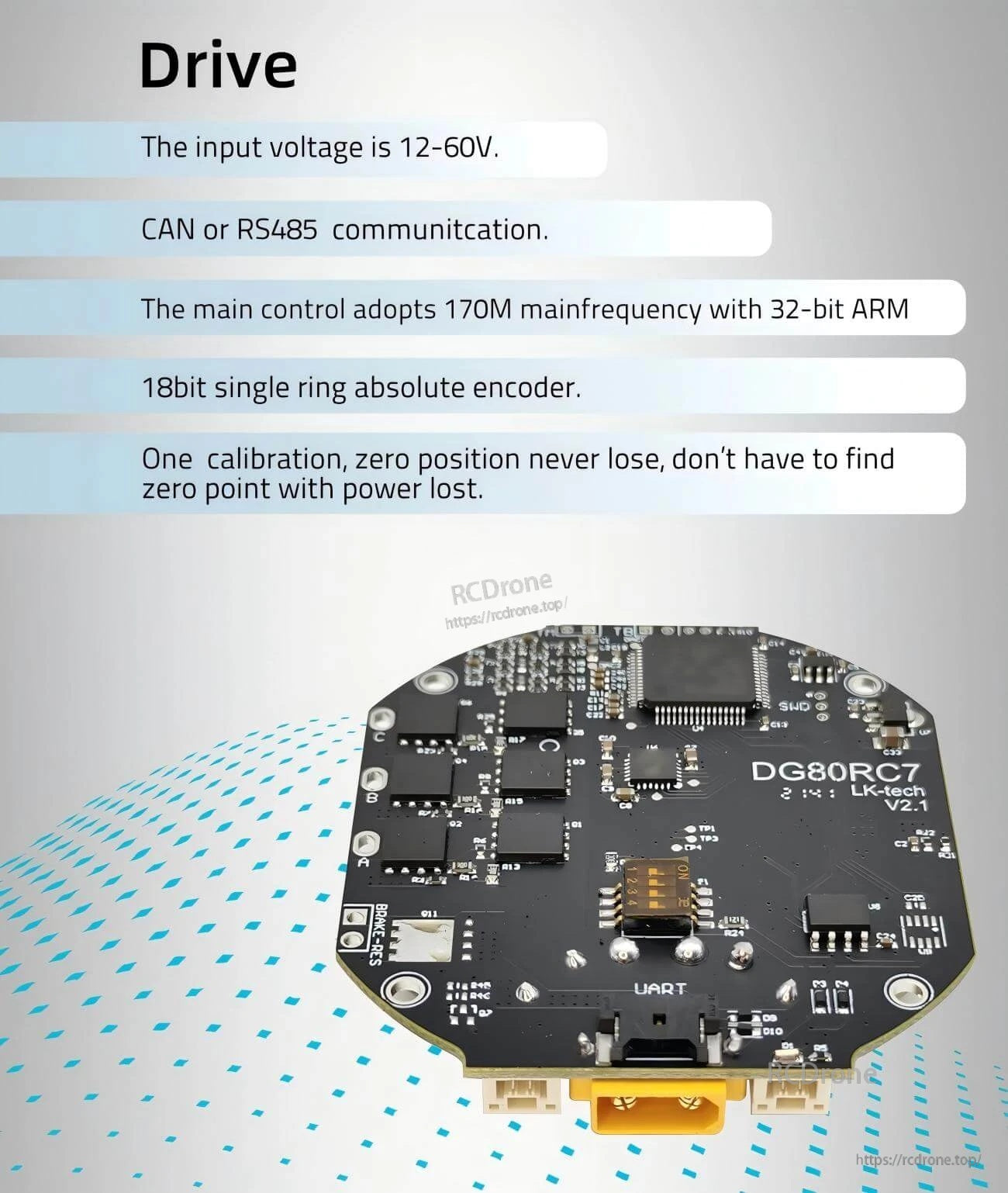
Le elettroniche del controller supportano un ingresso da 12–60V con comunicazione CAN o RS485 più un'opzione di encoder assoluto a 18 bit.
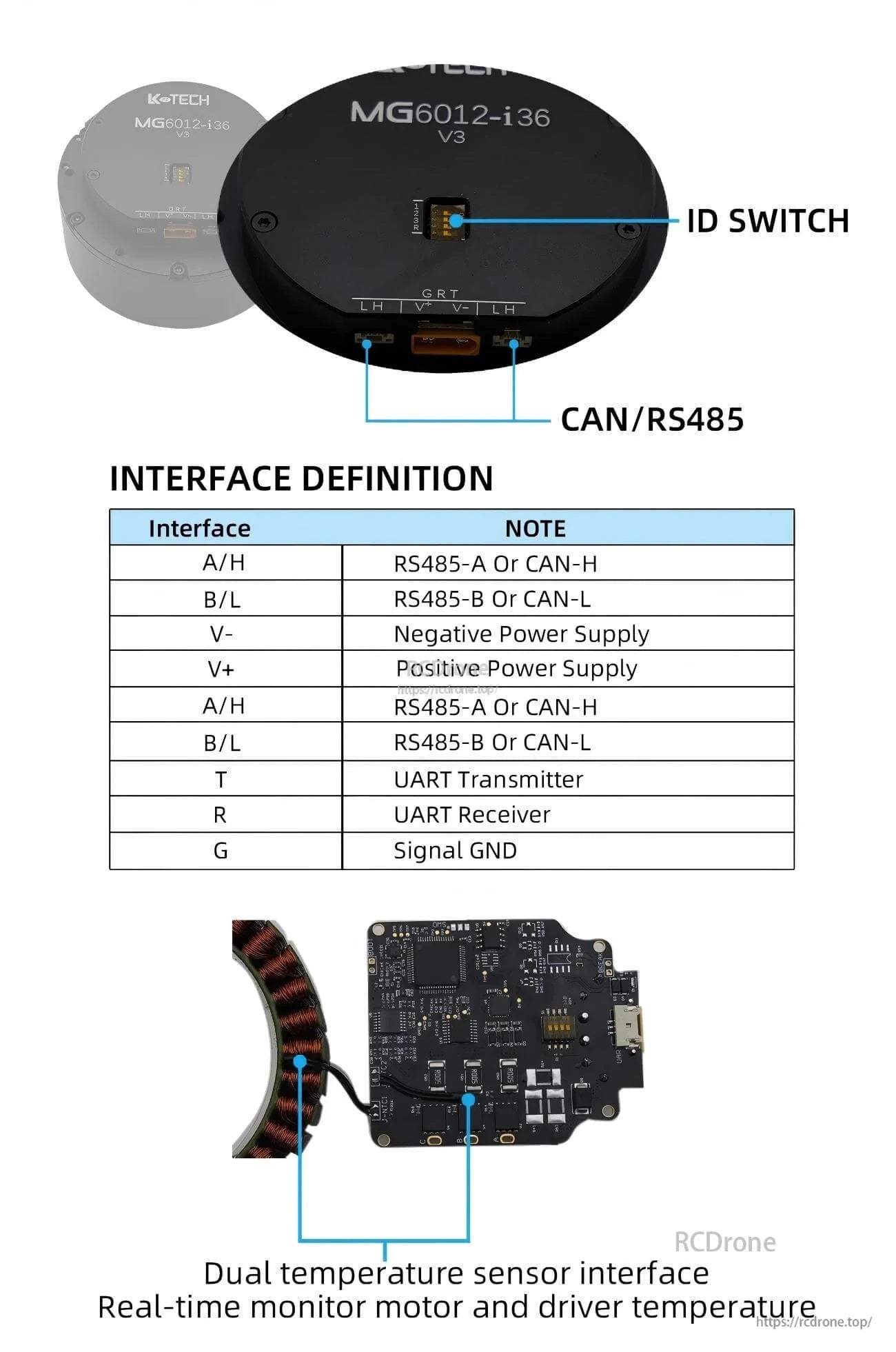
Chiare definizioni dei pin e un interruttore ID a bordo aiutano a semplificare il cablaggio e le configurazioni multi-nodo CAN/RS485.

Il riduttore planetario 1:36 è progettato per un basso gioco e un'alta coppia in assemblaggi di movimento di precisione.
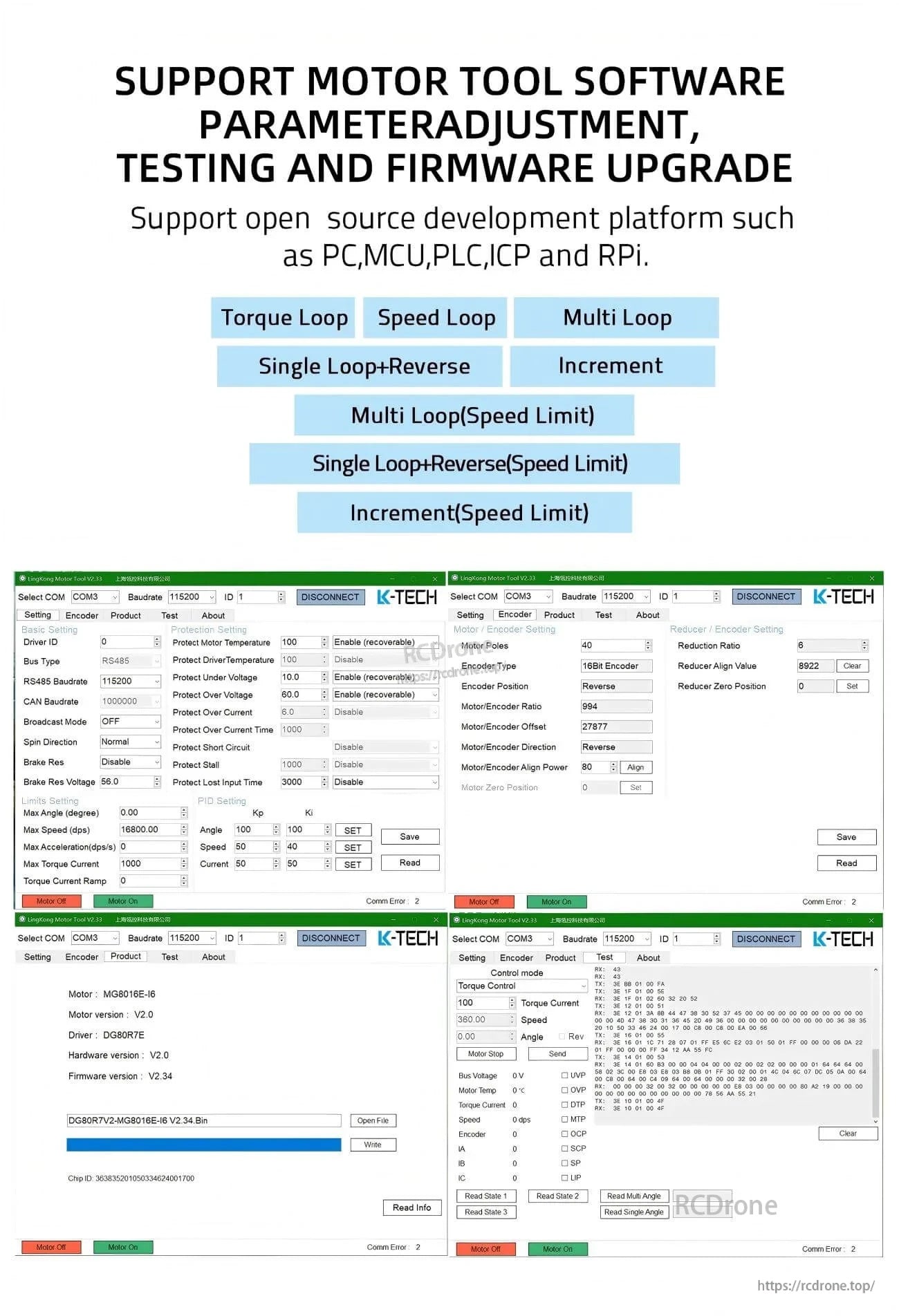
Il software di configurazione supporta la regolazione dei parametri, il test della modalità di loop e gli aggiornamenti del firmware su piattaforme di sviluppo comuni.
Adatto per applicazioni robotiche come AGV, bracci robotici, quadrupedi e meccanismi indossabili/esoscheletri.
Related Collections




