




Motore LKMTECH MHF6015-V3 24V 872RPM 3N.m Encoder Magnetico 19bit RS485/CAN per Robotica
Motore LKMTECH MHF6015-V3 24V 872RPM 3N.m Encoder Magnetico 19bit RS485/CAN per Robotica
LKMTECH
Impossibile caricare la disponibilità di ritiro
Panoramica
Il LKMTECH motore MHF6015-V3 è un motore brushless da 24V con un encoder magnetico a 19 bit e comunicazione RS485 o CAN, progettato per applicazioni di movimento robotico come robot umanoidi, bracci robotici, esoscheletri e veicoli AGV.
Caratteristiche principali
- Design integrato: scheda di guida integrata, MCU ad alte prestazioni, regolazione dei parametri host, volume ridotto e grande coppia, encoder di valore assoluto ad alta precisione.
- Design cavo; dimensione cavo contrassegnata come 12,7 mm (12,6 mm mostrato all'interno della chiamata cavo).
- Funzionamento fluido; certificazione CE (come dichiarato).
- Dichiarazione sui materiali di base: “Il materiale di base del motore è un foglio di acciaio al silicio di alta qualità e un magnete permanente a forte magnetismo ad alta temperatura.”
- Dichiarazione sul rotore esterno: “Il design piatto multi-stadio del rotore esterno fornisce una coppia più elevata ed è adatto per applicazioni legate allo spazio.”
- Dichiarazione sui cuscinetti: “Struttura senza spazzole con cuscinetti ad alte prestazioni per una rotazione più fluida e una vita più lunga.”
- Dichiarazione sul campionamento/controllo della corrente: “Campionamento della resistenza in lega sbiancata a bassa temperatura ad alta precisione, controllo accurato della corrente.”
- Dichiarazione sul drive: “Drive a ponte completo trifase N-tube, bassa resistenza interna, alta corrente.”
- Dichiarazione sul controllo: “Chiusura del loop di coppia, modalità di controllo della velocità e della posizione possono essere commutate arbitrariamente.”
- Dichiarazione sui parametri/test/aggiornamenti del firmware dell'host; supporta piattaforme di sviluppo open source come PC, MCU, PLC, ICP e RPi.
- Dichiarazione sulle modalità: Modalità coppia / Modalità velocità / modalità di controllo multi-giro / modalità posizione + direzione a giro singolo / modalità posizione incrementale; modalità di controllo multi-giro (con limite di velocità) / modalità posizione + direzione a giro singolo (con limite di velocità) / modalità posizione incrementale (con limite di velocità).
Specifiche
| Nome dell'articolo | MHF6015-V3 |
| Giri | 25 |
| Voltaggio nominale | 24V |
| Velocità massima | 872RPM |
| Momento torcentale nominale | 0.82N.m |
| Velocità nominale | 560RPM |
| Corrente nominale | 3.1A |
| Potenza massima | 57W |
| Momento torcentale massimo | 3N.m |
| Costante di velocità | 23.3rpm/V |
| Costante di coppia | 0.26N.m/A |
| Tipo di avvolgimento | Y |
| Resistenza di fase | 2.17Ω |
| Induttanza di fase | 1.44mH |
| Poli del motore | 28 |
| Inerzia del rotore | 515gcm² |
| Temperatura del motore | SÌ |
| Carico nominale del cuscinetto | 280N |
| Peso del motore | 251g |
| Consigliare il drive | DHF50 |
| Tensione di ingresso del drive | 7.4-32V |
| Comunicazione | RS485 O CAN |
| Frequenza di comunicazione | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | Encoder magnetico a 19 bit |
| Velocità di trasmissione dell'encoder (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Velocità di trasmissione (CAN) | 100K, 125K, 250K, 500K, 1M |
| Modalità di controllo | Loop di coppia (24KHz)/Loop di velocità (8KHz)/Loop di posizione (8KHz) |
| Curva di accelerazione | Accelerazione trapezoidale |
Per assistenza nella selezione o supporto all'integrazione, contattare il team di assistenza clienti al https://rcdrone.top/ o inviare un'email a [email protected].
Applicazioni
- Robot umanoidi
- Bracci robotici
- esoscheletri / robot esoscheletro
- Robot quadrupedi / cane mecha
- Veicoli AGV / auto AGV
- Robot ARU
- Robot di servizio
- Lidar portatile
- Robot per la riabilitazione
- Robot di ispezione
Manuali / Documenti
Dettagli

Un formato di motore integrato compatto servo-style mantiene il cablaggio e l'assemblaggio semplici per le articolazioni robotiche.
Una scheda di controllo integrata e un MCU supportano la regolazione dei parametri dall'host per una messa in servizio più semplice.
 Il layout a albero cavo (foro di 12,7 mm) aiuta a instradare cavi o alberi attraverso il motore per costruzioni più pulite.
Il layout a albero cavo (foro di 12,7 mm) aiuta a instradare cavi o alberi attraverso il motore per costruzioni più pulite.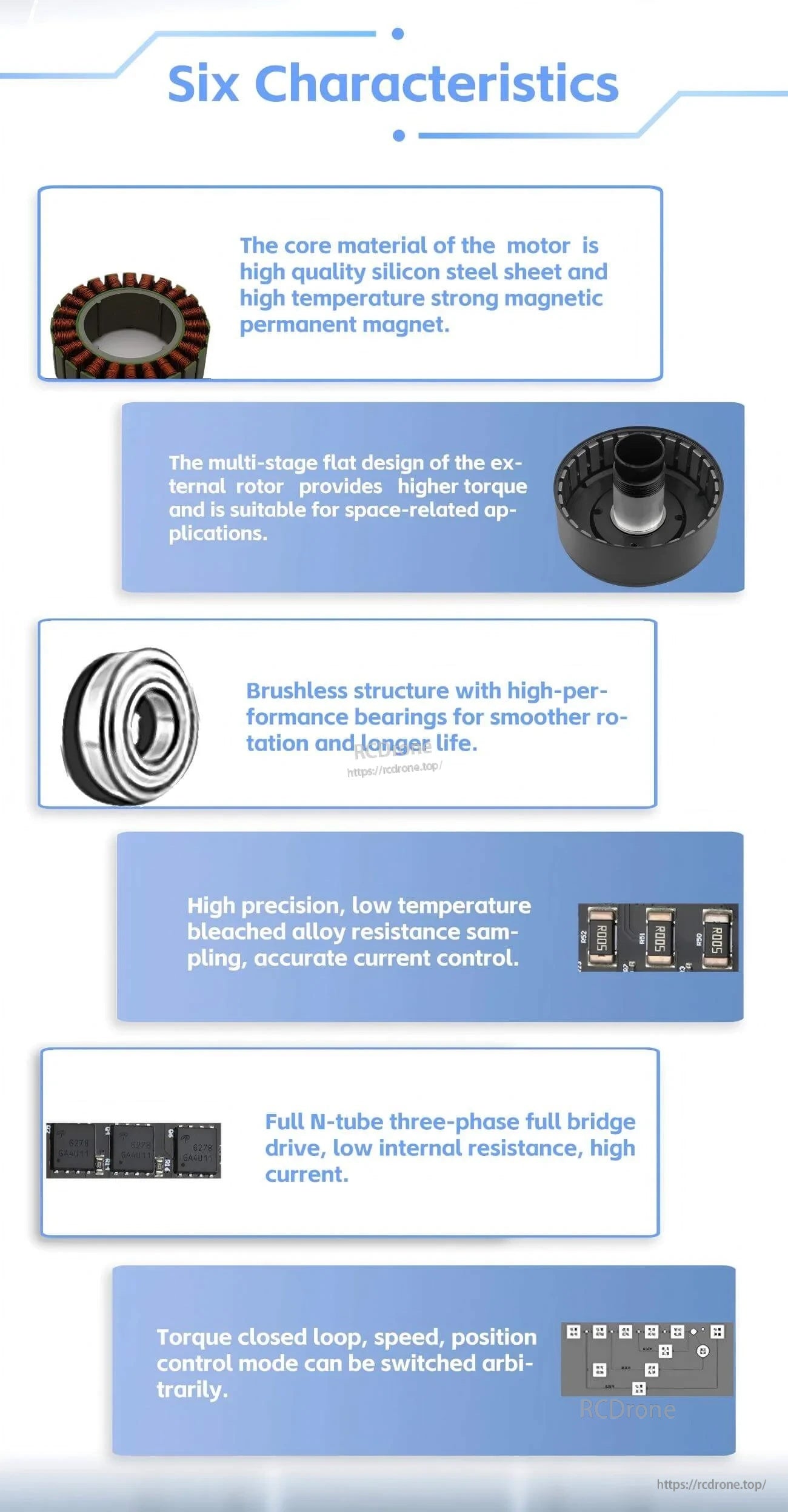
Le note di design chiave coprono materiali, struttura di coppia a rotore esterno, cuscinetti e capacità di controllo in anello chiuso.
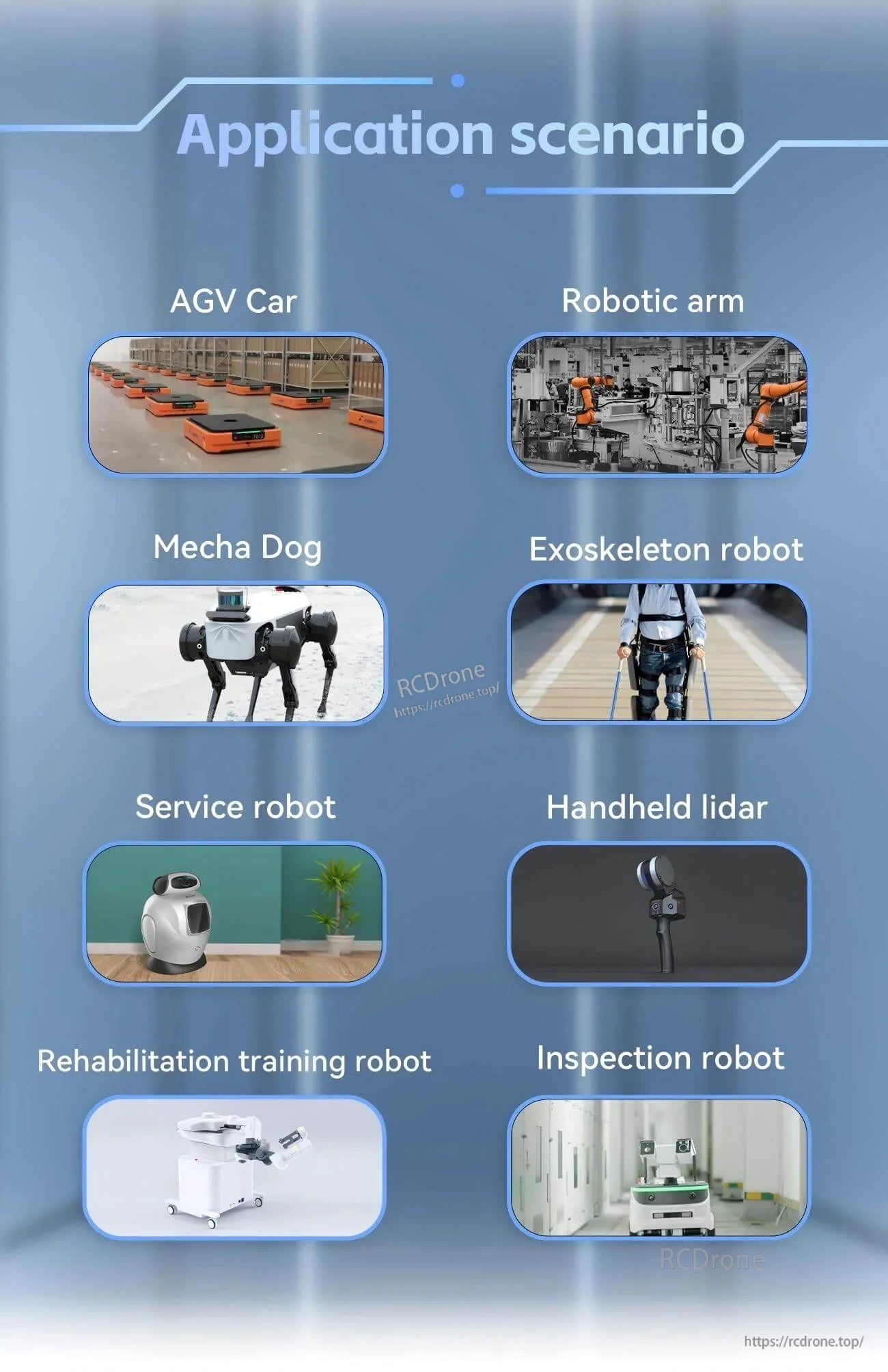
Progettato per compiti di movimento robotico come AGV, bracci robotici, quadrupedi, esoscheletri e robot di servizio.
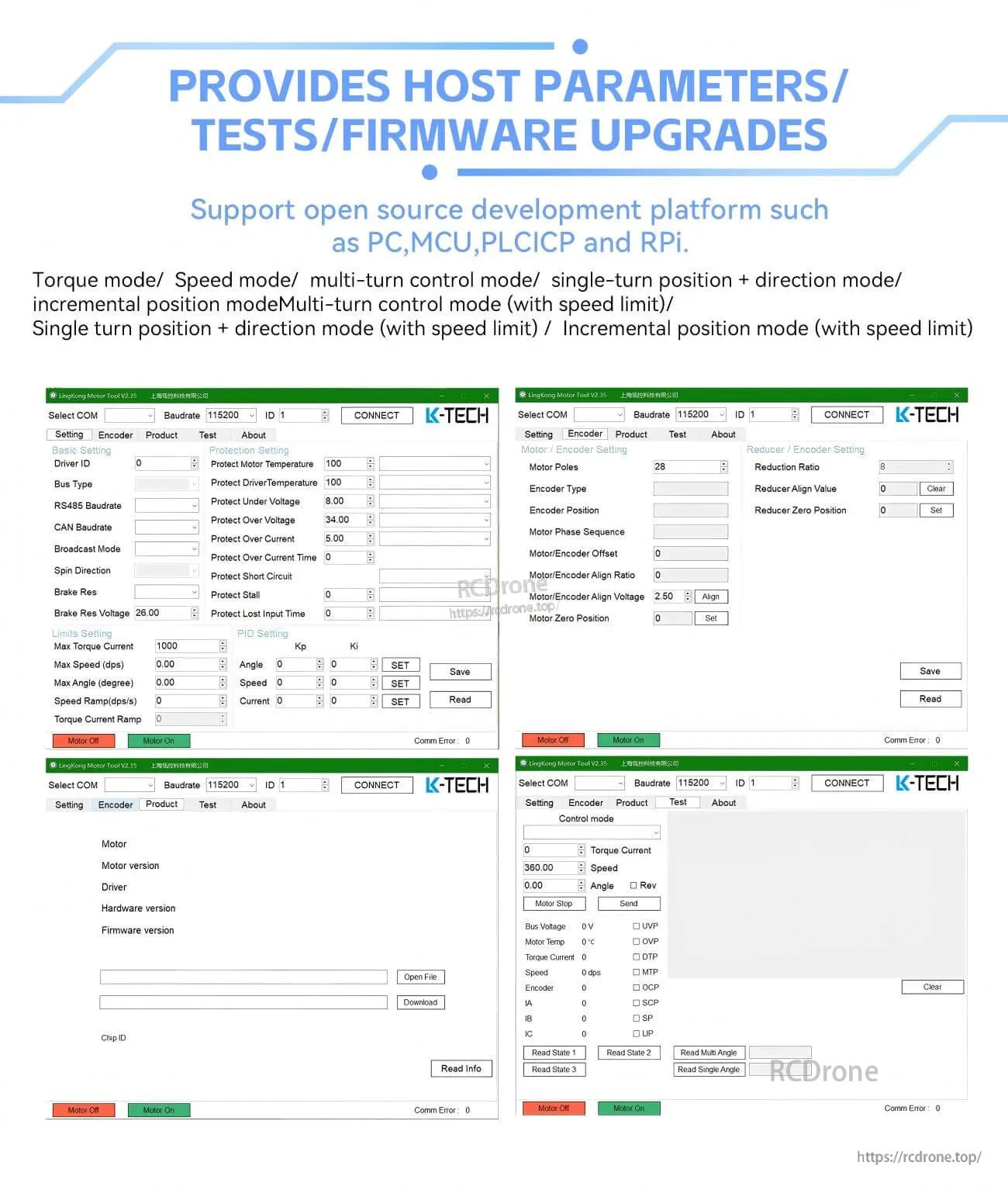
Le pagine del software PC illustrano la configurazione dei parametri, le funzioni di test e il supporto per l'aggiornamento del firmware.

Related Collections




