Matek AP Periph Nodo CAN CAN-G474 Scheda Adattatore DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
Matek AP Periph Nodo CAN CAN-G474 Scheda Adattatore DroneCAN, STM32G474CE 512KB, CANFD 5Mbit/s
MATEKSYS
Impossibile caricare la disponibilità di ritiro
Panoramica
Questo nodo AP Periph CAN, il Matek nodo AP Periph CAN-G474, è un nodo adattatore ArduPilot AP_Periph progettato per aggiungere periferiche a un bus DroneCAN utilizzando un trasmettitore CAN da 5 Mbit/s e un MCU STM32G474. Consente l'integrazione di sensori supportati da ArduPilot e periferiche basate su GPIO (come uscite PWM e moduli di notifica LED) tramite DroneCAN.
Caratteristiche principali
- Nodo adattatore basato sul firmware ArduPilot AP_Periph
- MCU STM32G474CE con 512KB di Flash
- Hardware compatibile con CANFD con supporto CAN/CANFD da 1Mbit a 5Mbit
- 2x bus CAN
- 4x UART per GNSS, misuratore di distanza, prossimità, EFI, ingresso RC (ricevitore); MSP abilitato su TX3 per impostazione predefinita per GNSS, bussola, barometro tramite MSP
- 2x bus I2C per periferiche I2C (sensore di velocità dell'aria, barometro, bussola)
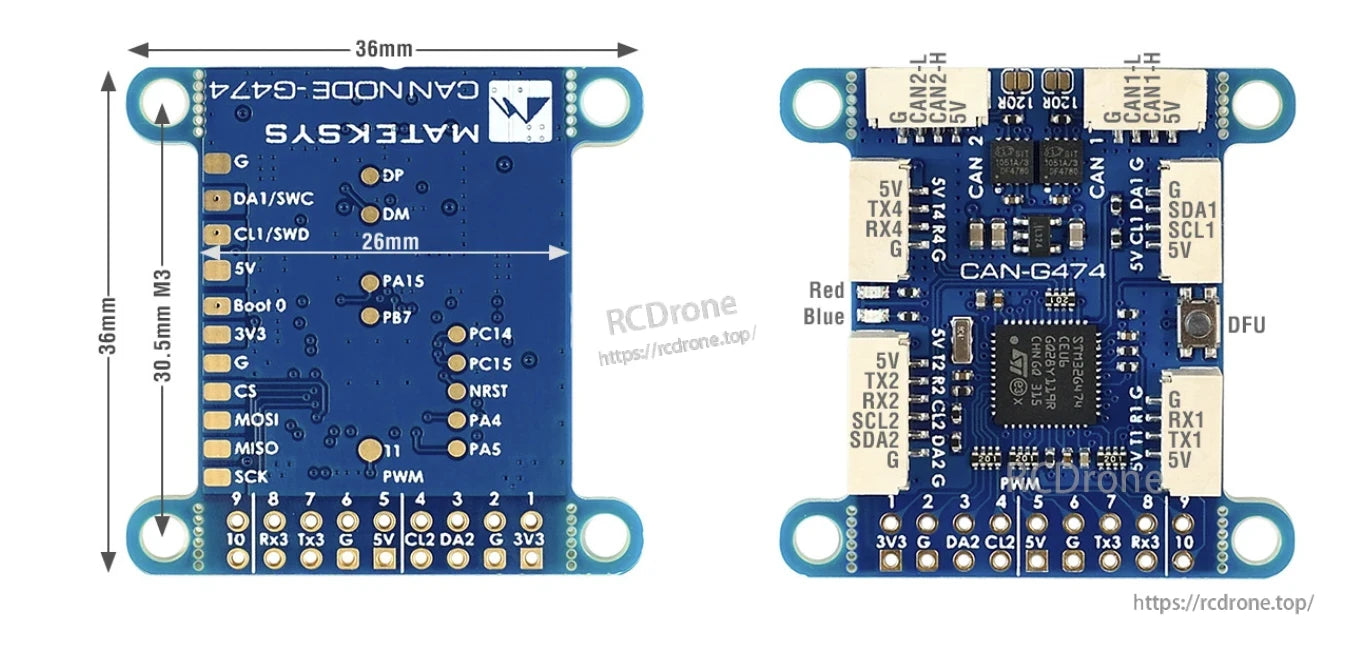
- 1x SPI per RM3100 (pad SPI sul lato inferiore con serigrafia “CS, MOSI, MISO, SCK”)
- 11x uscite PWM per servocomandi e ESC; tutti i PWM supportano DMA/DShot (PWM1-10 su DuPont 2.54mm fori; pad PWM11 sul lato inferiore con stampa serigrafica "11"
- Supporto per aggiornamento firmware tramite DroneCAN GUI Tool / Mission Planner (Scheda DroneCAN) e tramite STM32CubeProgrammer in modalità DFU (UART1)
Specifiche
| MCU | STM32G474CE |
| Flash | 512KB |
| Velocità di trasmissione dati del trasmettitore CAN | Fino a 5Mbit/s |
| Supporto CAN / CANFD | 1Mbit ~ 5Mbit CAN/CANFD |
| Bus CAN | 2x |
| UART | 4x (MSP abilitato su TX3 per impostazione predefinita) |
| I2C | 2x |
| SPI | 1x (per RM3100) |
| Uscite PWM | 11x (PWM1-10 su DuPont 2.54mm fori; pad PWM11 sul lato inferiore) |
| Debug | Debug ST, SWC & SWD (sul lato inferiore) |
| Aggiornamento del firmware (DFU) | UART1 (TX1, RX1) |
| Indicatori LED | Blu lampeggiante veloce: Avvio; Blu lampeggiante lento: comunicazione con il controller di volo; Rosso: indicatore 3.3V |
| Intervallo di tensione di ingresso | 4.5~5.5V @pad/pin 5V& |
| Consumo energetico | 62mA |
| Temperature operative | -30~85 °C |
| Connettori | 5x JST-GH-4P (SM04B-GHS-TB) per CAN1, CAN2, I2C1, UART1, UART4; 1x JST-GH-6P (SM06B-GHS-TB) per UART3+I2C2 |
| Fori passanti | 18x DuPont 2.54mm fori |
| Dimensione della scheda | 36mm*36mm*6mm |
| Peso | 5.2g |
| Montaggio | 30.5mm 4x Dia.3mm |
Cosa è incluso
- 1x scheda CAN-G474
- 2x filo di silicone JST-GH-4P a JST-GH-4P da 20 cm
- 1x filo di silicone JST-GH-6P a JST-GH-6P da 20 cm
Servizio clienti: https://rcdrone.top/ o [email protected]
Applicazioni
- Convertire i periferici supportati da ArduPilot in periferici del bus DroneCAN (GNSS, Bussola, Barometro, Sensore di velocità dell'aria, Telemetro, Sensore di prossimità, Iniettori elettronici di carburante)
- Periferici basati su GPIO su DroneCAN, inclusi moduli di notifica PWM e LED
- Collegamenti di esempio dei periferici mostrati: Telemetro, GPS & Bussola, Sensore di velocità dell'aria, INPUT RC, MONITOR BATTERIA I2C
- Opzione di ridondanza: collegare un bus CAN al controllore di volo, oppure collegare entrambi
Manuali
- Download del firmware (ArduPilot AP_Periph): https://firmware.ardupilot.org/AP_Periph/
- MatekG474-Periph (per sensori periferici)
- MatekG474-DShot (per uscita DroneCAN-PWM)
- Metodi di aggiornamento
- Strumento GUI DroneCAN o Mission Planner – Scheda DroneCAN, carica “AP_Periph.bin”
- Modalità DFU di STM32CubeProgrammer: collega il modulo USB-TTL a UART1, collega USB mentre tieni premuto il pulsante DFU, carica “AP_Periph_with_bl.hex”
- File 3D: CAN-G474_STEP.zip
- Tutorial: Utilizzo degli adattatori MatekL431 per PWM e DShot
Dettagli
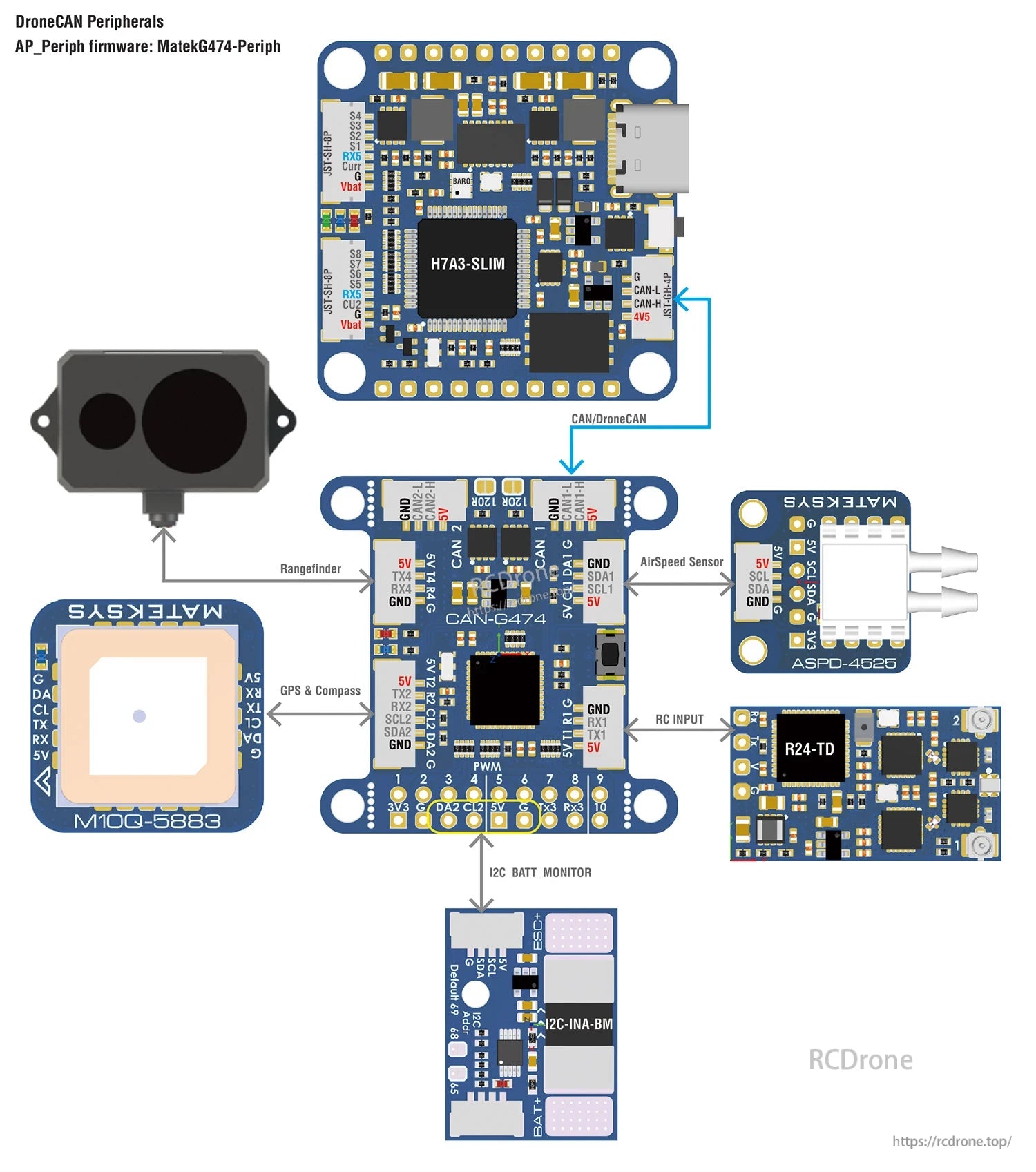
La scheda Matek CAN-G474 fornisce una porta DroneCAN/CAN insieme a UART, I2C e pad PWM per collegare periferiche comuni di autopilota.La scheda Matek CAN-G474 si collega a un bus CAN/DroneCAN e fornisce fino a 10 uscite PWM per servocomandi o ESC.
Related Collections