MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN MONITOR DI POTENZA DIGITALE
MATEK CAN-L4-BM - Mateksys AP_PERIPH CAN MONITOR DI POTENZA DIGITALE
MATEKSYS
Impossibile caricare la disponibilità di ritiro
MATEK CAN-L4-BM - Mateksys AP_PERIPH SPECIFICHE DEL MONITOR DI POTENZA DIGITALE CAN
Usa: Veicoli e giocattoli telecomandati
Età consigliata: 12+a,14+a
Origine: Cina continentale
Materiale: Materiale composito
Nome del marchio: MATEKSYS
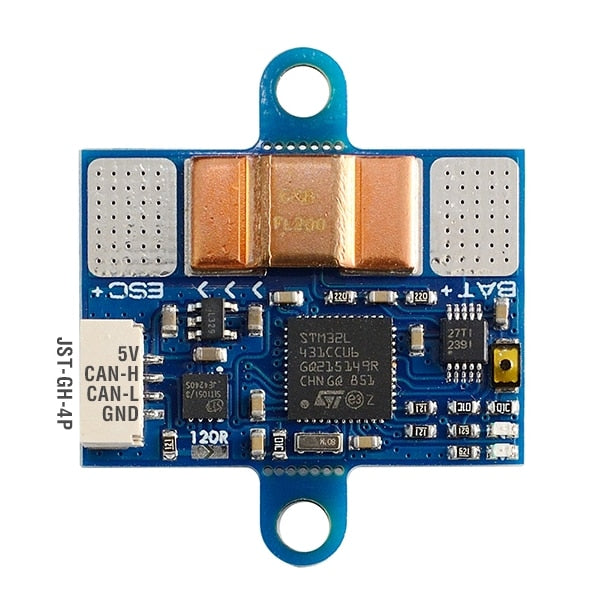
AP_PERIPH MONITOR DI POTENZA DIGITALE CAN, CAN-L4-BM
Corrente 0~204,8 A, Voltaggio 0~85 V, protocollo CAN/DroneCAN
-
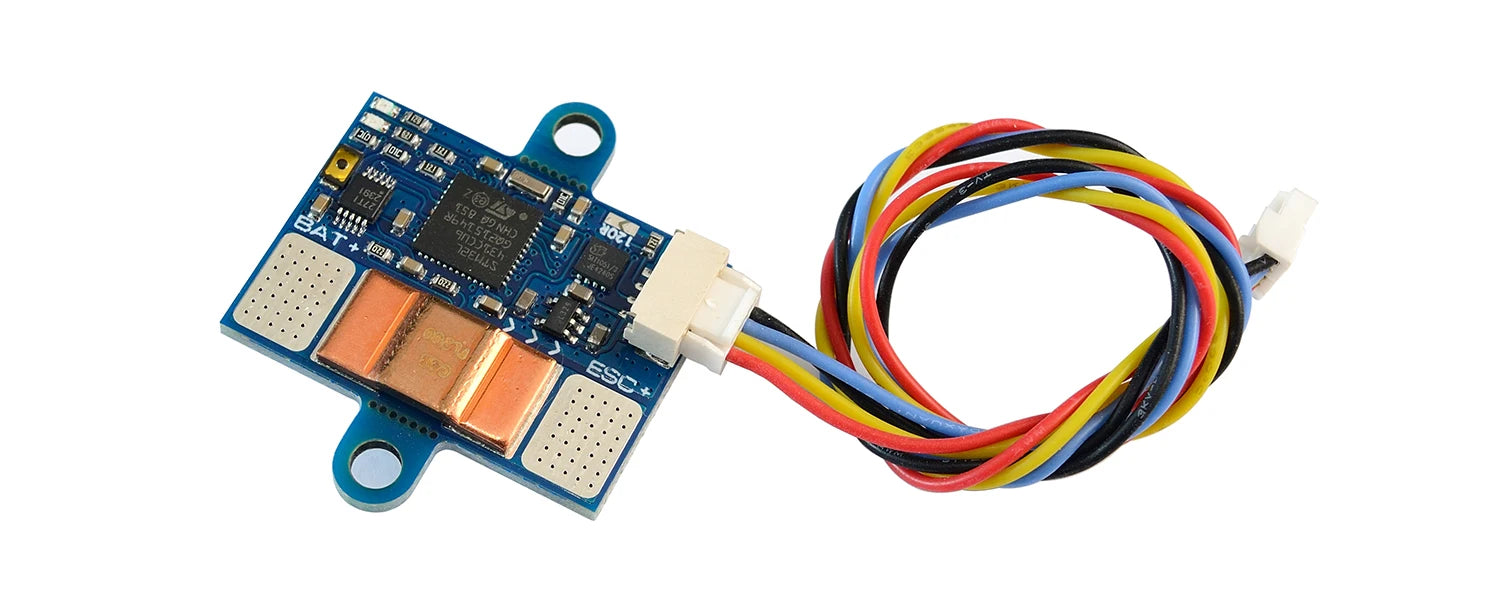
CAN-L4-BM è un monitor di potenza digitale ultrapreciso basato sul firmware TI INA239 e ArudPilot AP_Periph.
-
La resistenza di questo percorso conduttivo è tipica di 200 μΩ, garantendo una bassa perdita di potenza nell'applicazione.
-
Con questo dispositivo, non è richiesta alcuna calibrazione, il controllore di volo che supporta il protocollo DroneCAN può facilmente ottenere letture precise di corrente e tensione del bus tramite bus CAN.
Specifiche
-
MCU: STM32L431xC, flash da 256 KB
-
INA239 CI di monitoraggio della potenza ad alta precisione, 85 V, 16 bit, con interfaccia SPI
-
Ingresso rilevamento tensione batteria: 0~85 V
-
Intervallo rilevamento corrente: 0~204,8 A
-
Corrente di carico sul resistore di rilevamento corrente: 150 A (continua), 204,8 A (Burst)
-
Precisione della tensione: ± 0,1%
-
Precisione corrente: ± 2%
-
Interfaccia
-
CAN, protocollo DroneCAN
-
UART2, riserva, DFU
-
Debug ST, SWCLK e SWDIO
-
-
LED
-
Blu, lampeggiante veloce, avvio
-
Blu, lampeggiante lento, funzionante
-
Indicatore rosso, 3,3 V
-
Alimentazione per scheda CAN-L4-BM: 4,5~5,5 V @5 V pad/pin
-
Consumo energetico: 10 mA
-
Temperature di funzionamento: -40~85 °C
-
Fisico
-
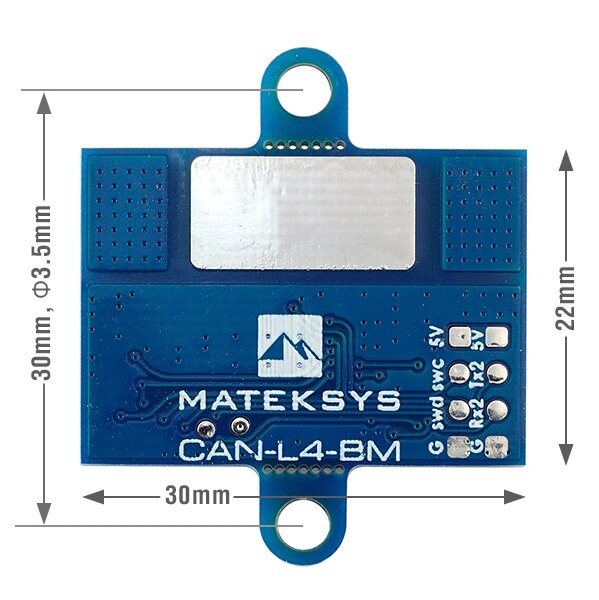
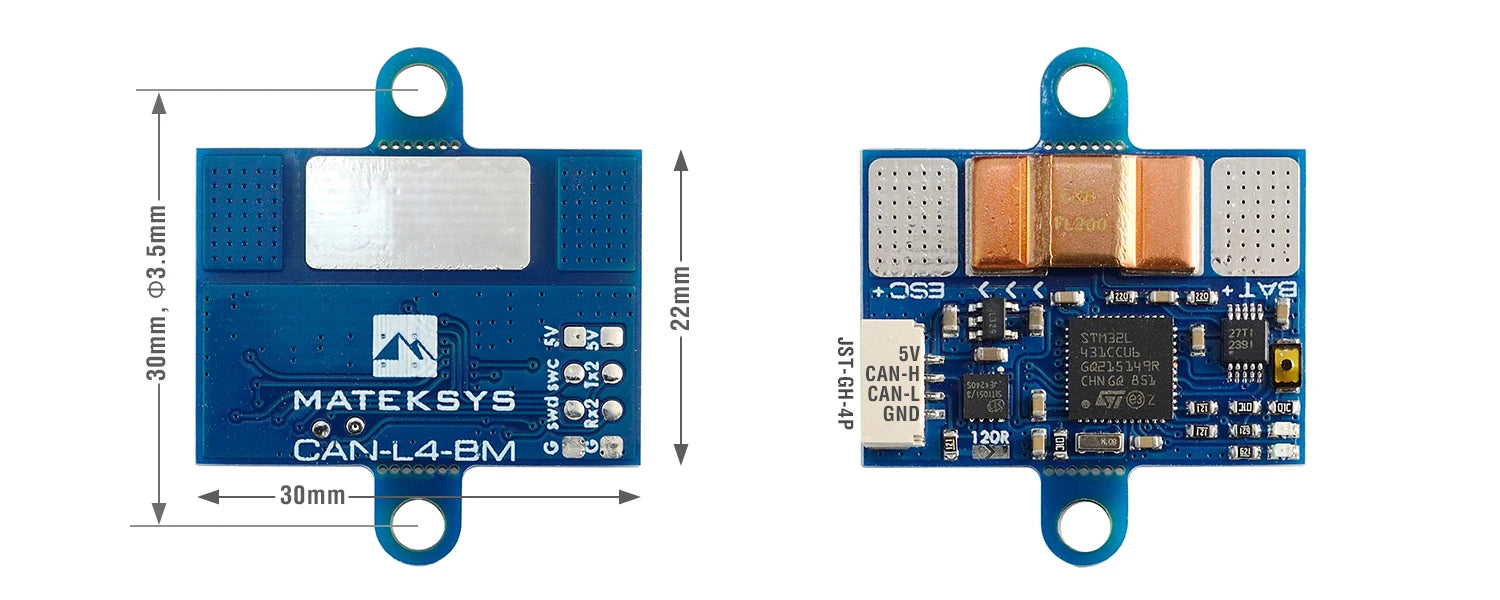
Dimensioni scheda: 30 mm*22 mm*3 mm. 4g
-
File 3D: CAN-L4-BM_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-BattMon
-
Aggiornamento tramite lo strumento GUI DroneCAN
-
-
Parametri
-
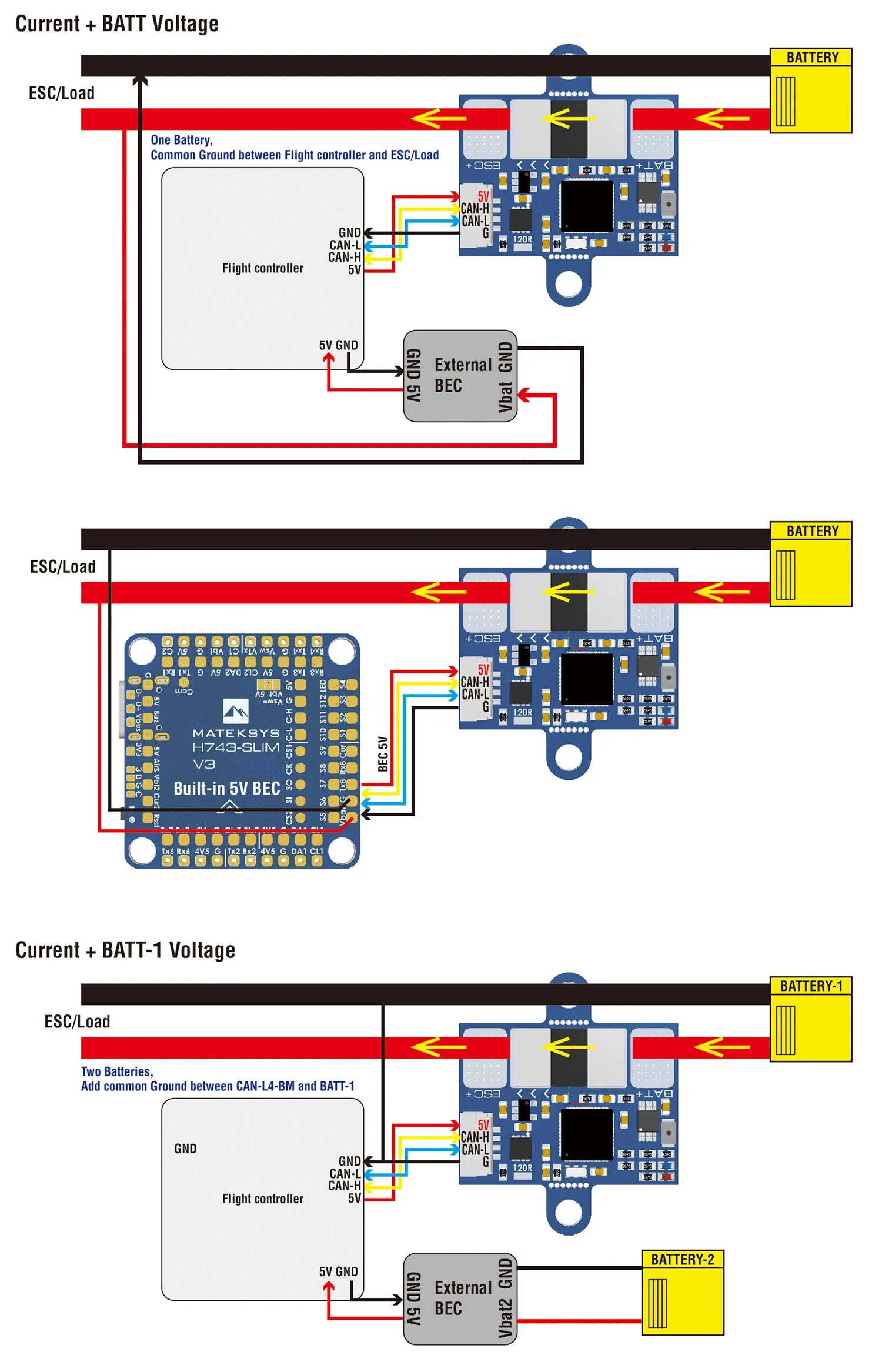
CAN_P1_DRIVER = 1 se collegato alla porta CAN bus1 o CAN_P2_DRIVER = 1 se collegato alla porta CAN bus2
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Imballaggio
-
1x scheda CAN-L4-BM
-
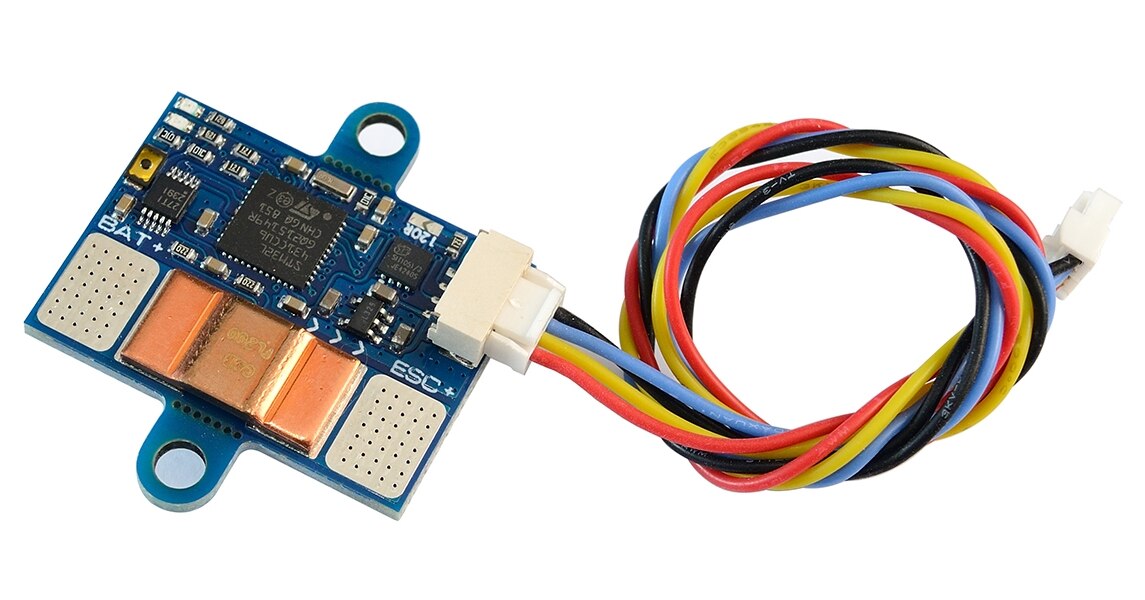
1x cavo in silicone da 20 cm da JST-GH-4P a JST-GH-4P
Suggerimenti
-
Il pad grande sul lato inferiore è un pad morto. Nessuna rete di circuiti su di esso.
-
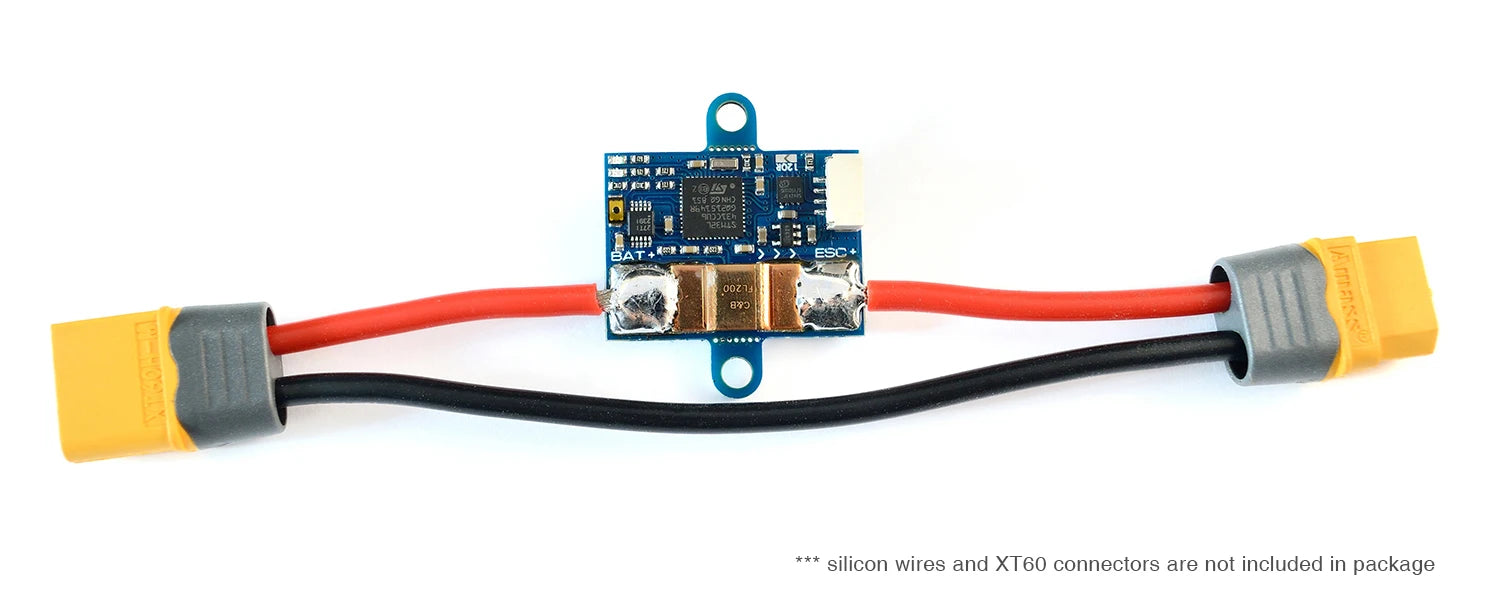
Saldare i fili positivi il più vicino possibile a entrambi i lati del resistore di rilevamento della corrente.
-
2 orecchie per il montaggio possono essere tagliate se non ne hai bisogno.
-
Se i cavi CAN sono troppo lunghi, collegare il ponticello "120R".
Related Collections