MATEK Mateksys AP_PERIPH CAN NODO L431
MATEK Mateksys AP_PERIPH CAN NODO L431
MATEKSYS
Impossibile caricare la disponibilità di ritiro
SPECIFICHE MATEK Mateksys AP_PERIPH CAN NODE L431
Usa: Veicoli e giocattoli telecomandati
Età consigliata: 12+a,14+a,3-6a,6-12a,0-3a
Origine: Cina continentale
Materiale: Materiale composito
Nome del marchio: MATEKSYS
AP_PERIPH CAN NODO L431
AP_Periph, nodo CAN, DroneCAN, L431


-
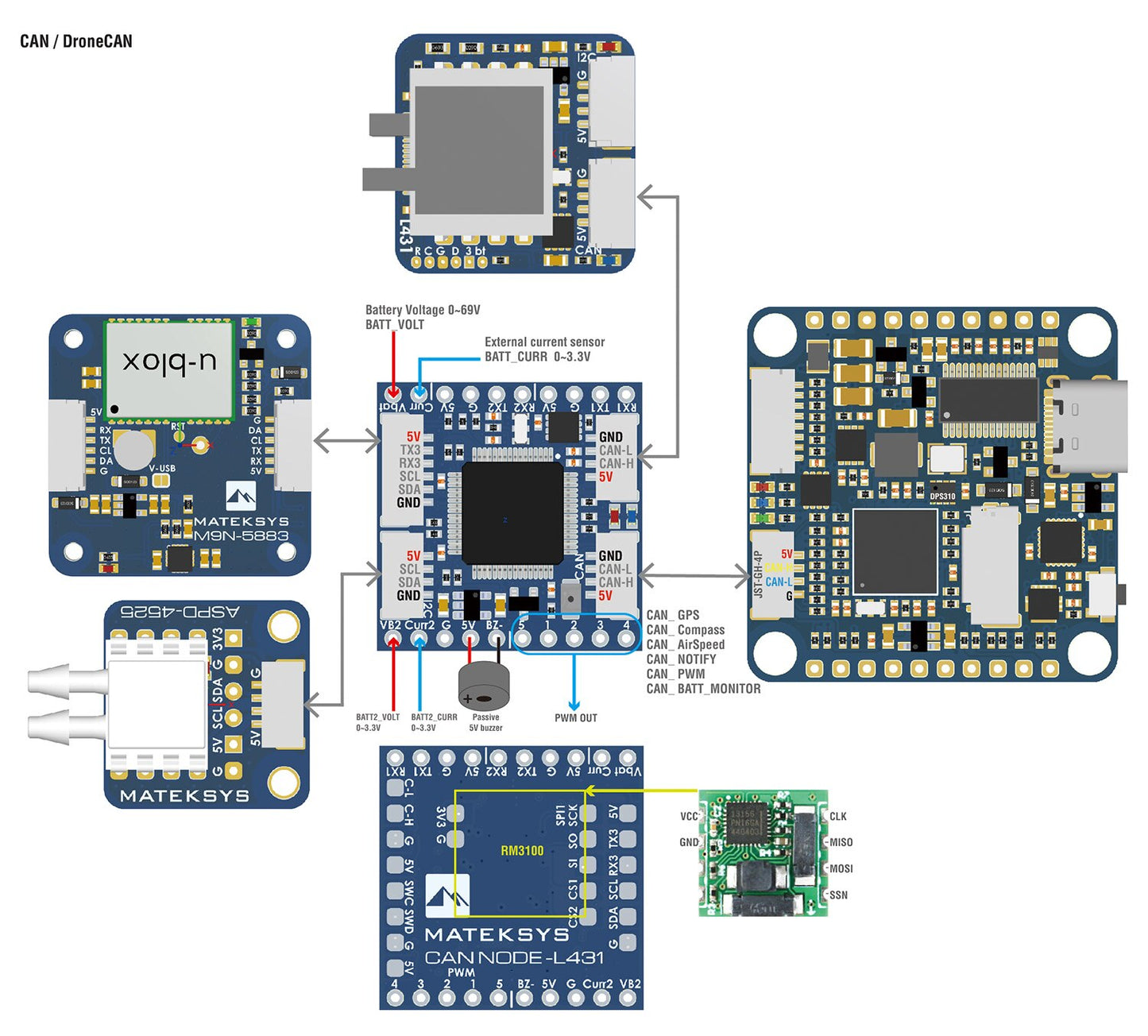
CAN-L431 è un nodo adattatore basato sul firmware ArudPilot AP_Periph.
-
Con questa scheda, è possibile utilizzare facilmente la libreria di driver ArduPilot per convertire le periferiche GNSS, bussola, barometro, sensore di velocità dell'aria e basate su GPIO (PWM, notifica cicalino/LED) supportate da ArduPilot in periferiche bus DroneCAN.
Specifiche
-
MCU: STM32L431xC, flash da 256 KB
-
Velocità dati del ricetrasmettitore CAN fino a 5 Mbit/s nella fase veloce CAN FD
-
1x CAN, protocollo DroneCAN (2x connettori GH-4P in parallelo)
-
3x UART
-
UART1, riserva
-
UART2, impostazione predefinita MSP, DFU
-
UART3, impostazione predefinita GPS
-
-
1x I2C
-
per sensore di velocità dell'aria periferico
-
per Barometro periferico
-
per periferica Bussola QMC5883L
-
-
1x SPI
-
per periferica RM3100
-
-
4x ADC
-
BATT_VOLT, PIN 5
-
BATT_CURR, PIN 6
-
BATT2_VOLT, PIN 15
-
BATT2_CURR, PIN 16
-
-
5x uscite PWM
-
1x GPIO con TIM16 per cicalino
-
Debug ST, SWCLK e SWDIO
-
LED
-
Blu, lampeggiante veloce, avvio
-
Blu, lampeggiante lento, funzionante
-
Indicatore rosso, 3,3 V
-
Intervallo di tensione in ingresso: 4,5~5,5 V @5 V pad/pin
-
Consumo energetico: 40 mA
-
Temperature operative
-
Fisico
-
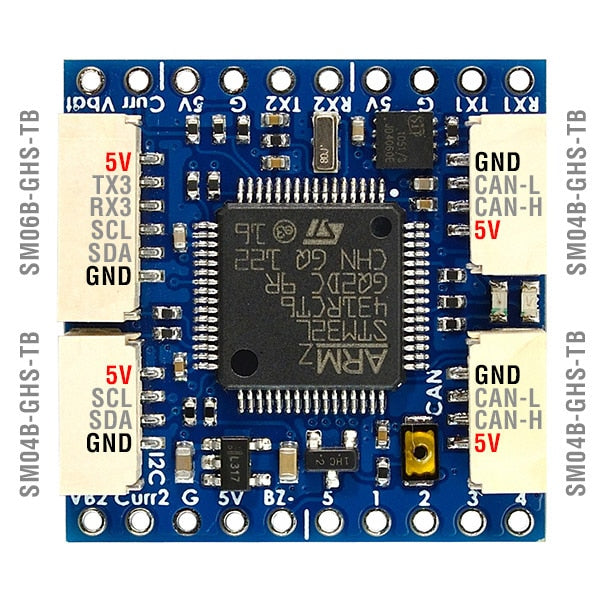
2x JST-GH-4P(SM04B-GHS-TB) per CAN
-
1x JST-GH-4P(SM04B-GHS-TB) per I2C
-
1x JST-GH-6P(SM06B-GHS-TB) per UART3+I2C
-
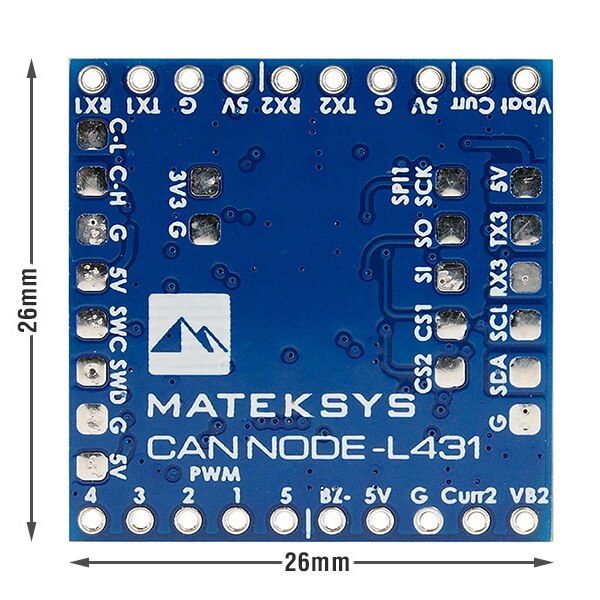
Dimensioni scheda: 26mm*26mm*6mm. 3,7 g
-
File 3D: CAN-L431_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-Periph o MatekL431-Airspeed
-
Aggiornamento tramite lo strumento GUI DroneCAN
-
Imballaggio
-
1x scheda CAN-L431
-
1x cavo in silicone da 20 cm da JST-GH-4P a JST-GH-4P
-
1x cavo in silicone da JST-GH-6P a JST-GH-6P da 20 cm
Suggerimenti
-
Il firmware MatekL431-Periph supporta la bussola I2C QMC5883L per impostazione predefinita
-
Se colleghi un'altra bussola I2C a questa scheda, devi aggiornarla con questo firmware tramite DroneCAN GUI o modalità SLCAN in Mission Planner.
-
Related Collections