Modulo GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
Modulo GPS MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Impossibile caricare la disponibilità di ritiro
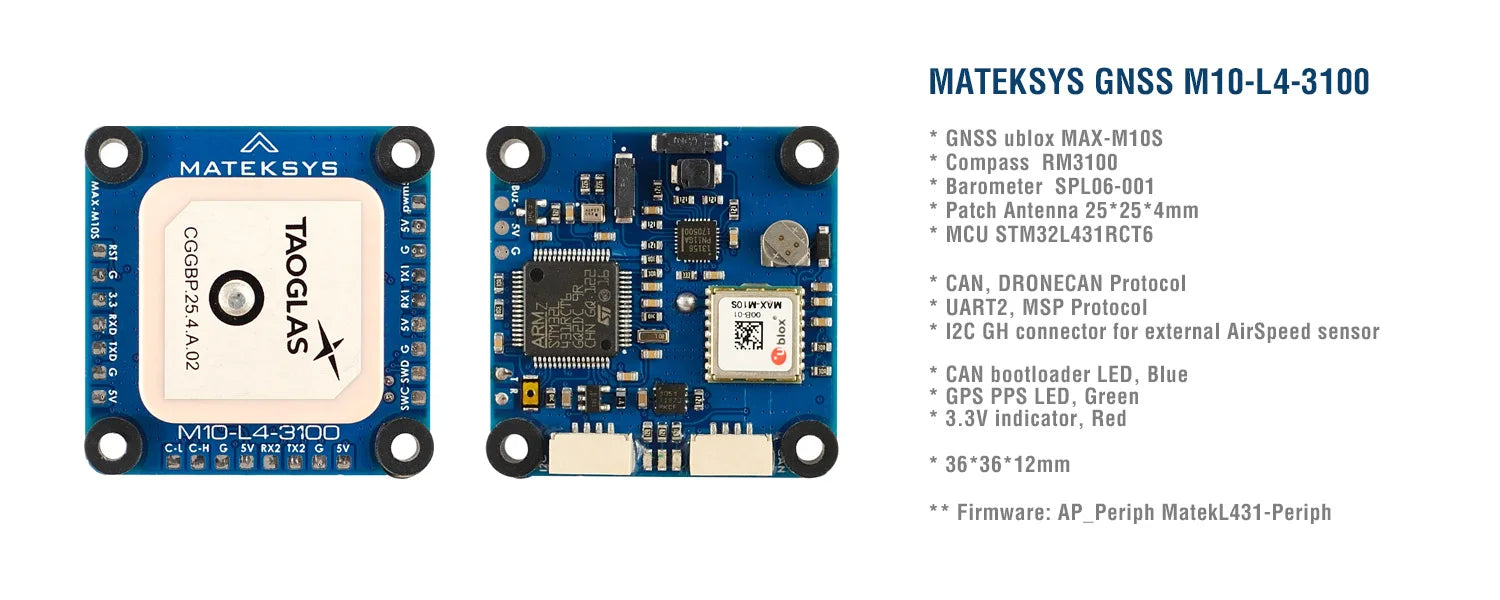
MATEK M10-L4-3100 - SPECIFICHE GNSS Mateksys AP_PERIPH
Usa: Veicoli e giocattoli telecomandati
Età consigliata: 12+a,14+a,6-12a
Origine: Cina continentale
Materiale: Materiale composito
Nome del marchio: MATEKSYS
AP_PERIPH GNSS M10-L4-3100
Nodo CAN AP_Periph L431, MAX-M10S, RM3100, SPL06-001, protocollo DroneCAN e UART_MSP
-
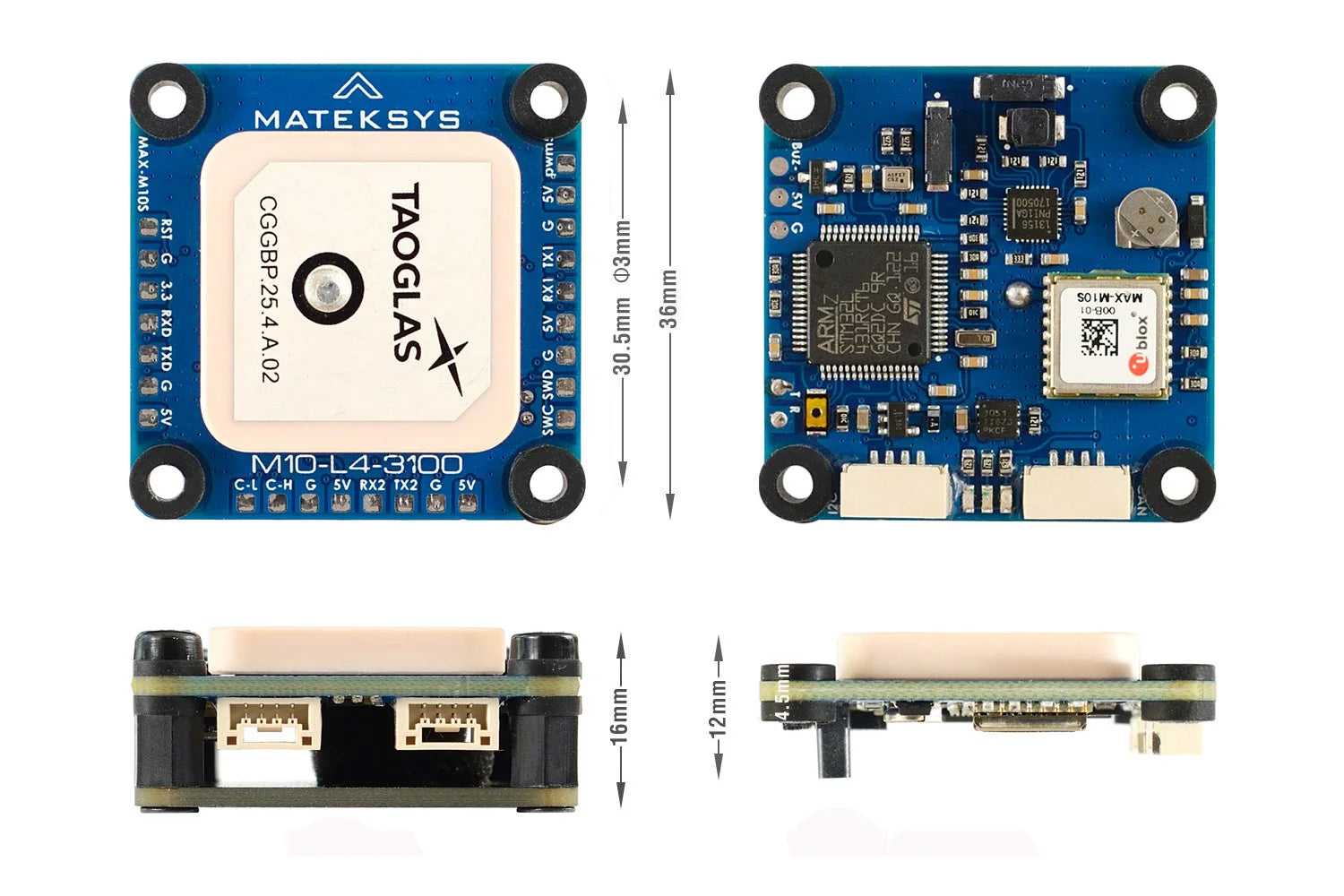
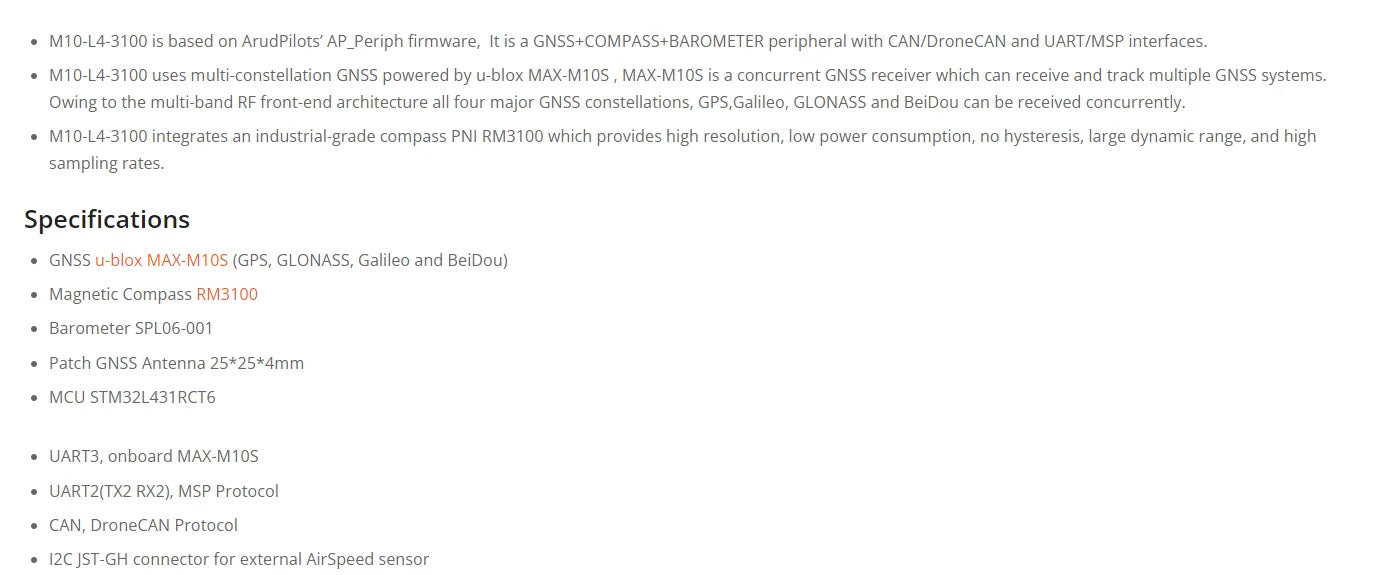
M10-L4-3100 è basato sul firmware AP_Periph di ArudPilots, è una periferica GNSS+COMPASS+BAROMETER con interfacce CAN/DroneCAN e UART/MSP.
-
M10-L4-3100 utilizza GNSS multi-costellazione alimentato da u-blox MAX-M10S, MAX-M10S è un ricevitore GNSS simultaneo che può ricevere e tracciare più sistemi GNSS. Grazie all'architettura front-end RF multi-banda, tutte e quattro le principali costellazioni GNSS, GPS, Galileo, GLONASS e BeiDou possono essere ricevute contemporaneamente.
-
M10-L4-3100 integra una bussola PNI RM3100 di livello industriale che fornisce alta risoluzione, basso consumo energetico, nessuna isteresi, ampio intervallo dinamico e frequenze di campionamento elevate.

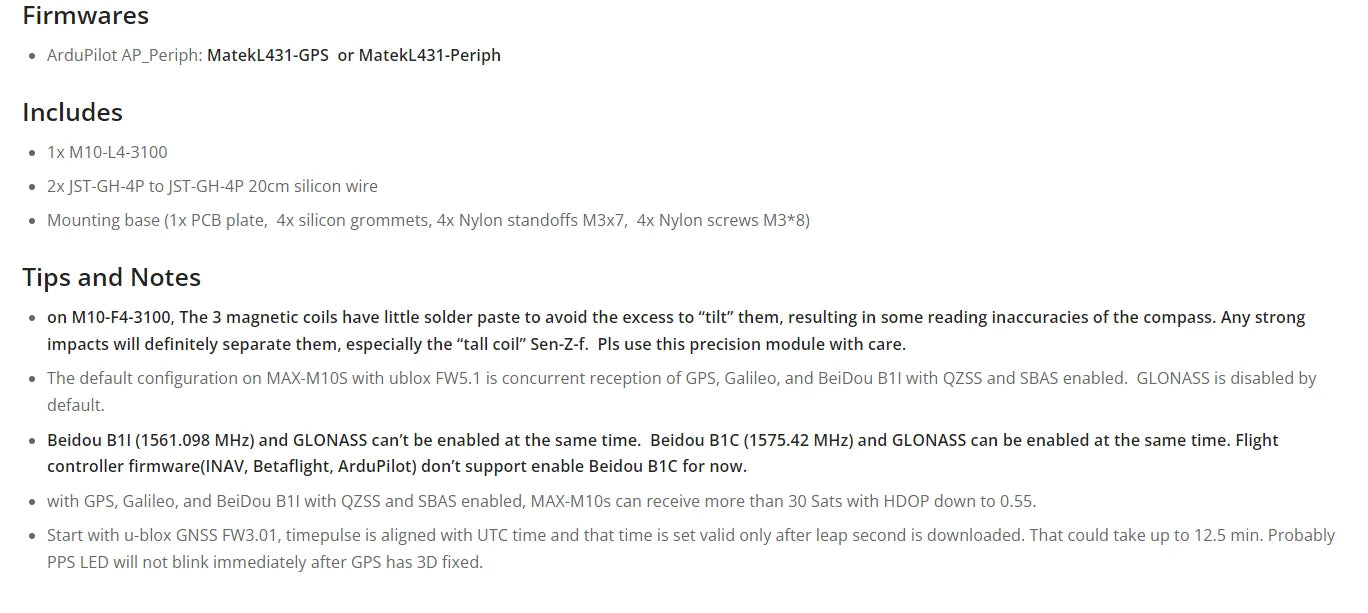
la configurazione predefinita su MAX-M1OS con ublox FWS. è la ricezione simultanea di GPS, Galileo e BeiDou BI con QZSS e SBAS abilitati. GLONASS è disabilitato per impostazione predefinita Beidou B1I (1575,42 MHz) e non può essere abilitato contemporaneamente.
Connessione CAN (protocollo UAVCAN)
-
M10-L4-3100 5 V — FC 4,5 V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN alto
-
M10-L4-3100 CAN-L — FC CAN basso
-
M10-L4-3100 G — FC G/GND
Parametri FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
TIPO_GPS -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (assicurati che DroneCAN non sia selezionato)
————————————————————————–
Se si collega il sensore di velocità dell'aria I2C alla porta I2C di M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
E devi impostare i parametri del nodo CAN per il sensore di velocità collegato alla porta I2C di M10-L4-3100
Pianificazione missione > Configurazione iniziale > Hardware opzionale > UAVCAN > Modalità SLCan CAN1 > Parametri
-
MS4525 ARSP_TYPE -> 1 (predefinito in hwdef)
-
MS5525 ARSP_TYPE -> 3 supporta MS5525 solo con indirizzo 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Scrivi e riavvia
————————————————————————–
Se colleghi il 2812LED DIN al pad PWM5
-
NTF_LED_TYPES -> (assicurati che DroneCAN sia selezionato)
Modalità SLCan CAN1 > Parametri
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
Il firmware AP_Periph deve essere "MatekL431-Periph", La funzionalità MSP è disabilitata in "MatekL431-GPS"
Connessione UART (protocollo MSP)
-
M10-L4-3100 5 V — FC 4,0 V ~ 5,3 V
-
M10-L4-3100 TX2 — FC UART_RX di riserva
-
M10-L4-3100 RX2 — FC UART_TX di riserva (non essenziale)
-
M10-L4-3100 G — FC G/GND
Parametri FC ArduPilot (dalla versione 4.1.x)
-
Serialx_PROTOCOL = 32 (MSP) dove x è la porta SERIAL utilizzata per la connessione sul pilota automatico.
-
Serialx_BAUD = 115 dove x è la porta SERIAL utilizzata per la connessione sul pilota automatico.
-
TIPO GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Se desideri utilizzare la barra MSP come barra primaria, altrimenti lasciala come predefinita)
-
COMPASS_TYPEMASK 0 (o assicurati che il bit MSP non sia selezionato)
Parametri FC INAV (dalla versione 2.6)
-
M10-L4-3100 è compatibile con qualsiasi controllore di volo supportato da INAV su un UART di riserva.
-
Nella scheda Porte, abilita MSP sull'UART corrispondente collegato a M10-L4-3100, NON abilitare "GPS" su quell'UART. seleziona Velocità baud 115200.
-
funzione GPS
-
imposta provider_gps = MSP
-
imposta mag_hardware = MSP
-
imposta baro_hardware = MSP
-
imposta align_mag = CW90, se la bussola è montata in posizione piatta con la freccia rivolta in avanti e anche la freccia del controllore di volo è rivolta in avanti.
Related Collections