Matek System H743 / MINI H743 Controllore di volo - STM32H743VIT6 ICM20602 OSD integrato DPS310 PDB per parti di droni da corsa FPV RC
Matek System H743 / MINI H743 Controllore di volo - STM32H743VIT6 ICM20602 OSD integrato DPS310 PDB per parti di droni da corsa FPV RC
MATEKSYS
Impossibile caricare la disponibilità di ritiro
SPECIFICHE del controllore di volo del sistema Matek H743 / MINI H743
Interasse: Viti
Parti/accessori di aggiornamento: Adattatore
Forniture di strumenti: Classe assemblata
Parametri tecnici: Valore 2
Taglia: COME DESCRIZIONE
Periferiche/dispositivi di controllo remoto: Controller remoto
Età consigliata: 12+anni
Parti e accessori RC: Regolatori di velocità
Quantità: 1 pezzo
Origine: Cina continentale
Numero modello: H743-MINI
Materiale: Metallo
Attributi trazione integrale: Assemblaggio
Per tipo di veicolo: Elicotteri
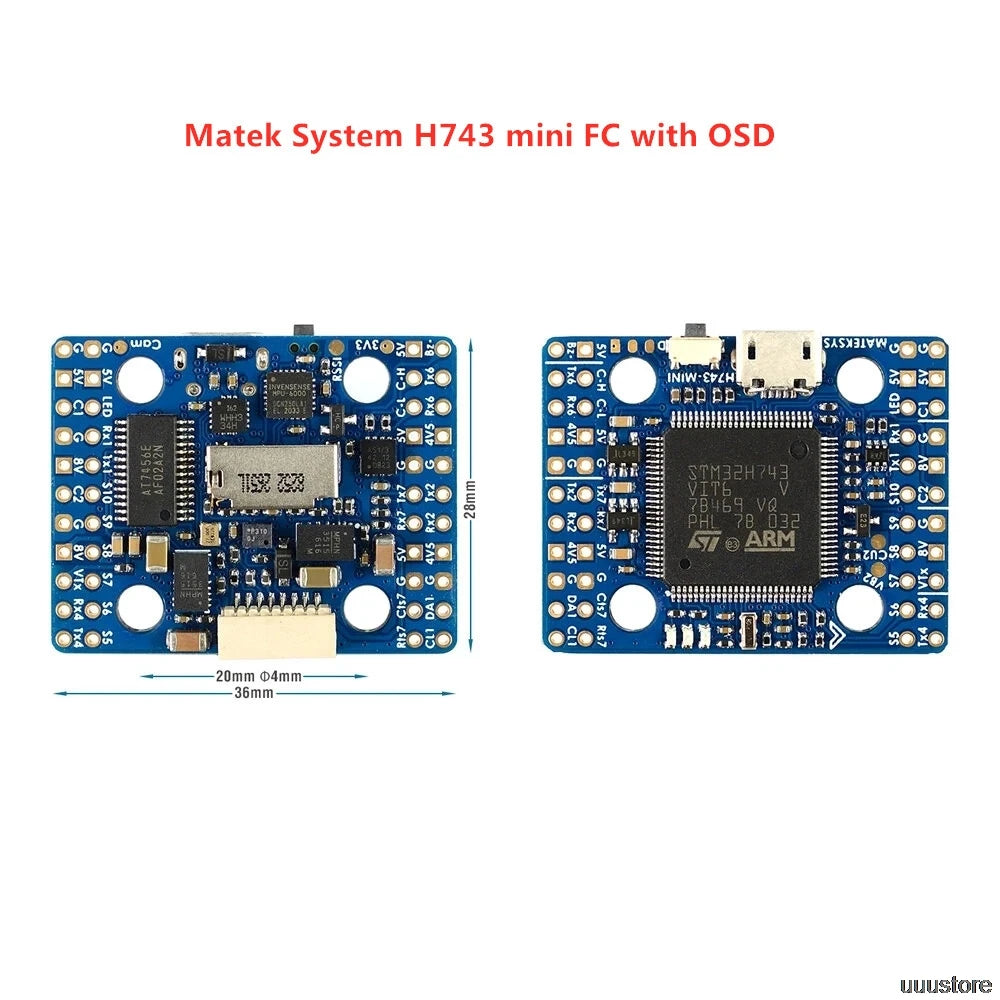
Matek System H743 MINI H743 Controllore di volo STM32H743VIT6 ICM20602 OSD integrato DPS310 PDB per parti di droni da corsa FPV RC
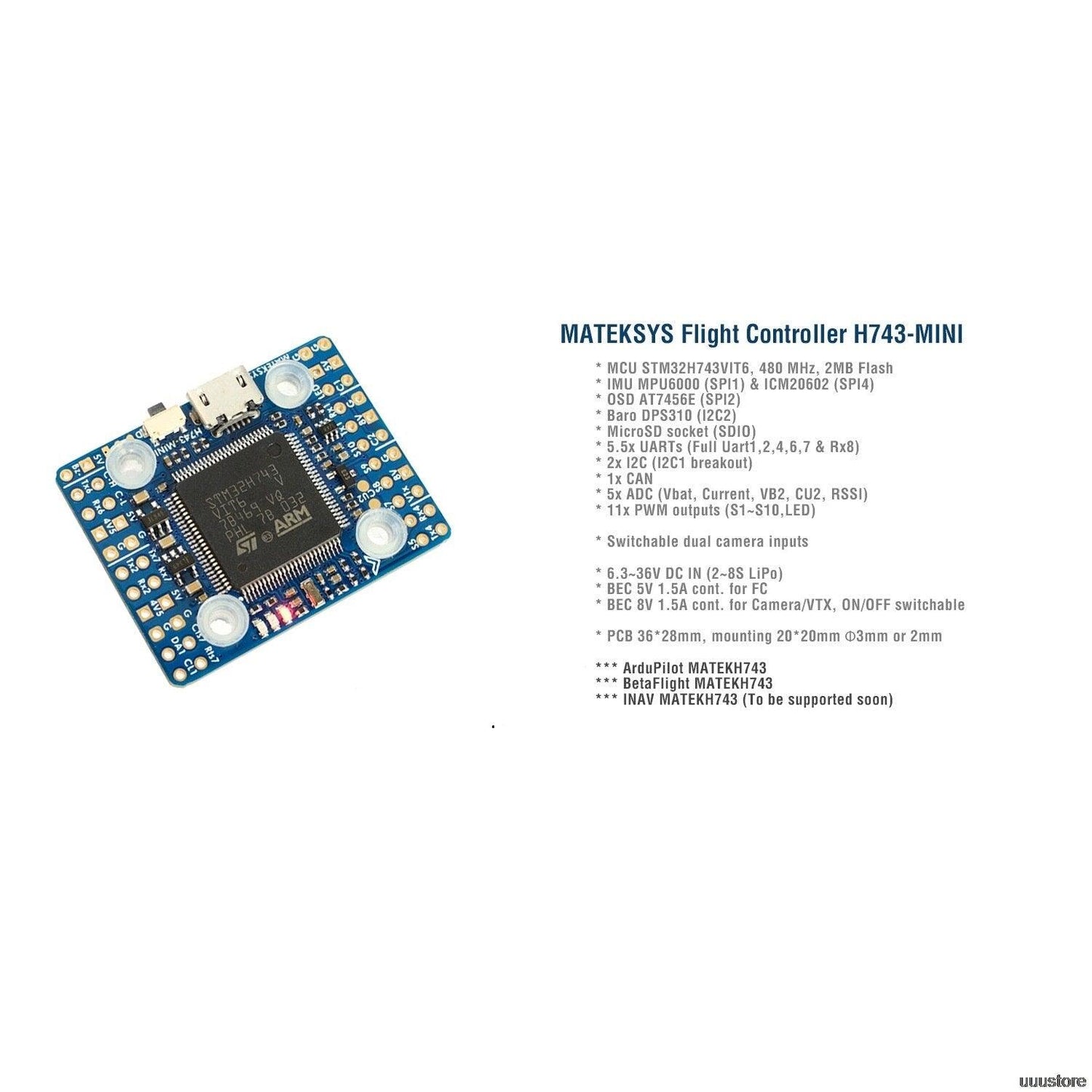
Specifiche FC
- MCU: STM32H743VIT6, 480 MHz, 1 MB di RAM, 2 MB di flash
- IMU: MPU6000 (SPI1) e ICM20602 (SPI4)
- Baro: Infineon DPS310 (I2C2)
- OSD: AT7456E (SPI2)
- Blackbox: presa per scheda MicroSD (SDIO)
- 5,5x Uart (1,2,4,6,7, Rx8)
- 11 uscite PWM (S1~S10, LED)
- 2x I2C (pad I2C1/DA1 CL1, senza breakout I2C2)
- 1x CAN (elettrodi C-H, C-L)
- 5x ADC (VBAT, Corrente, RSSI, VB2, CU2)
- 3x LED per STATO FC (blu, rosso) e indicatore 3,3 V (rosso)
- 1x connettore JST-SH1.0_8pin (Vbat/G/Curr/Rx8/S1/S2/S3/S4)
- Interruttore ingressi doppia fotocamera
- Interruttore ON/OFF alimentazione 8V
Potenza
- Ingresso Vbat: 6,3~36 V (2~8S LiPo)
- BEC: 5 V 1,5 A cont. (Max.2A)
- BEC: 8 V 1,5 A cont. (Max.2A), 8 V emettono stabili quando Vbat>=10 V, 8 V emettono l'80% di Vbat quando Vbat< 10 V
- LDO 3,3 V: 200 mA
- Il pad VB2 supporta max. 69V (partitore di tensione 1K:20K)
- Potenza statica: 200mA@5V with Betaflight, 150mA@5V with ArduPilot
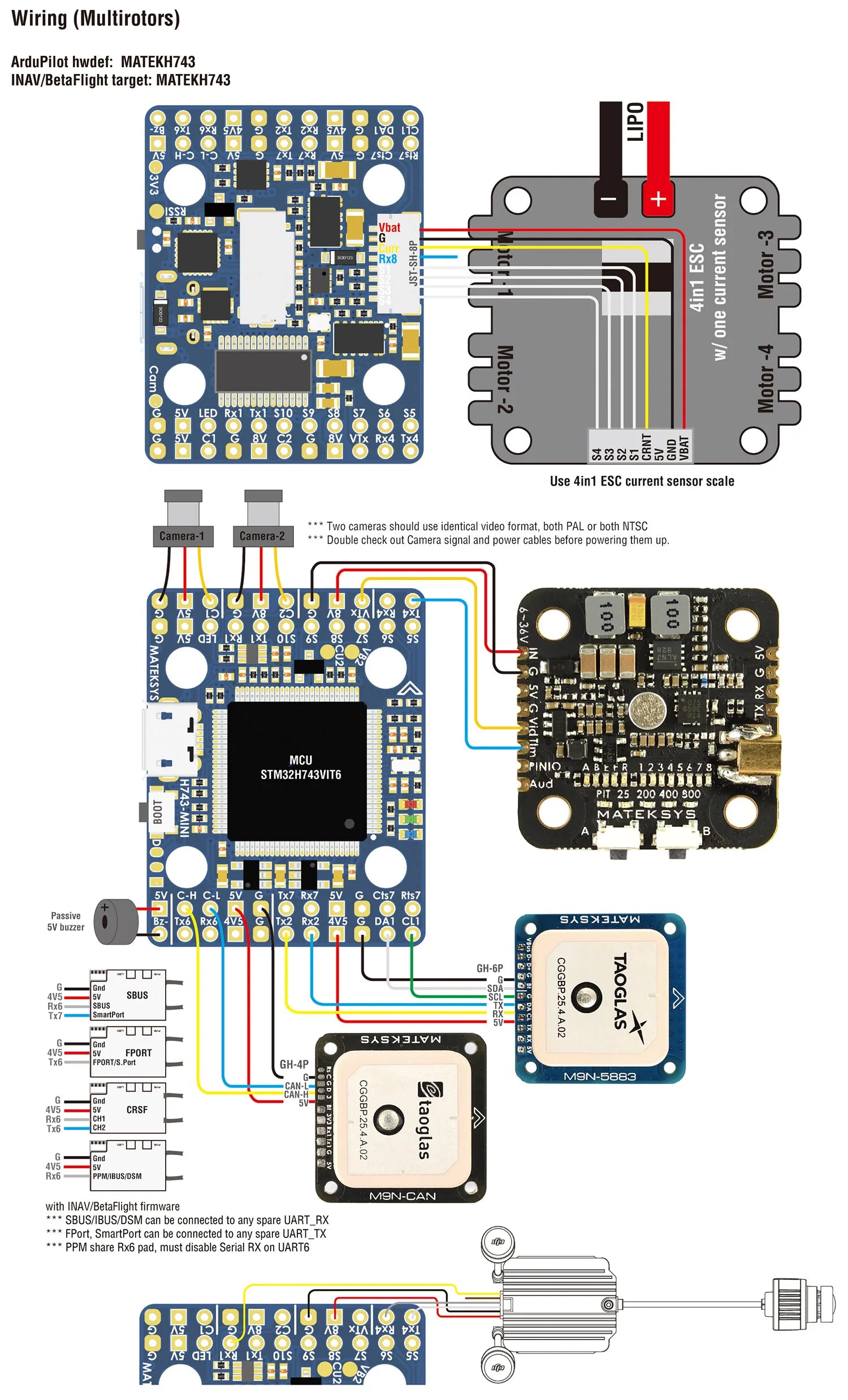
Firmware FC
- ArduPilot(ChiBiOS): MATEKH743
- BetaFlight: MATEKH743
- INAV: MATEKH743 (supportato a breve)
Fisico
- Montaggio
- 20 x 20 mm/Φ3 mm con occhielli in silicone
- 20 x 20 mm/Φ2 mm con anelli di tenuta in silicone e ottone
- Dimensioni: 36 x 28 x 6,5 mm
- Peso: 7 g
Incluso
- 1x H743-MINI
- 6x anelli di tenuta in silicone da M4 a M3
- 6 anelli di tenuta in ottone da M3 a M2
- 1x cavo JST-SH1.0_8pin, 5 cm
- 2x connettori JST-SH1.0_8pin
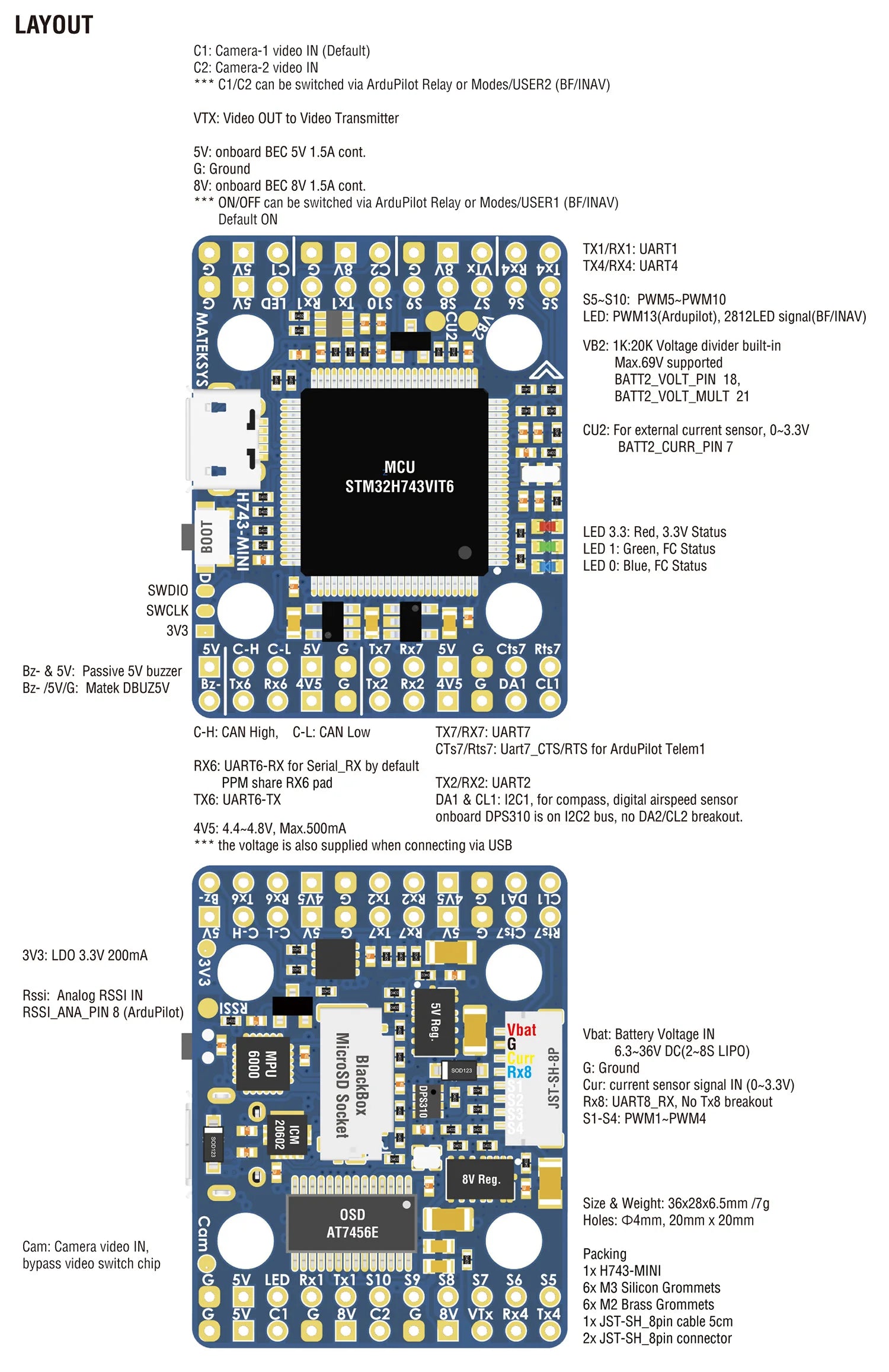
La modalità C1 può essere cambiata utilizzando la funzione Relay di ArduPilot o Modes/USER2 (BFiINAV). Per impostazione predefinita, questa modalità è abilitata su TXI/RXI tramite UART1 a una velocità di trasmissione di 8X. Inoltre, in modalità VX, il canale TXA/Rx4 del trasmettitore comunica con il controllore di volo tramite UART4 a una velocità di 31,25 kHz.
-

Related Collections