Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - con bussola QMC5883L Modulo velocità digitale 4~9V per drone da corsa FPV
Matek Systems GNSS M10Q-5883 U-Blox M10 GPS - con bussola QMC5883L Modulo velocità digitale 4~9V per drone da corsa FPV
MATEKSYS
Impossibile caricare la disponibilità di ritiro
SPECIFICHE Matek Systems GNSS M10Q-5883 U-Blox M10 GPS
Interasse: Piastra inferiore
Usa: Veicoli e giocattoli telecomandati
Aggiornamento parti/accessori: GPS
Forniture utensili: Categoria assemblaggio
Parametri tecnici: KV1100
Taglia: come mostrato
Periferiche/dispositivi di controllo remoto: Telecomando
Età consigliata: 12+anni
Parti e accessori RC: M10Q-5883
Quantità: 1 pezzo
Origine: Cina continentale
Numero modello: Matek GNSS M10Q-5883
Materiale: Materiale composito
Attributi trazione integrale: Assemblaggio
Per tipo di veicolo: Aerei
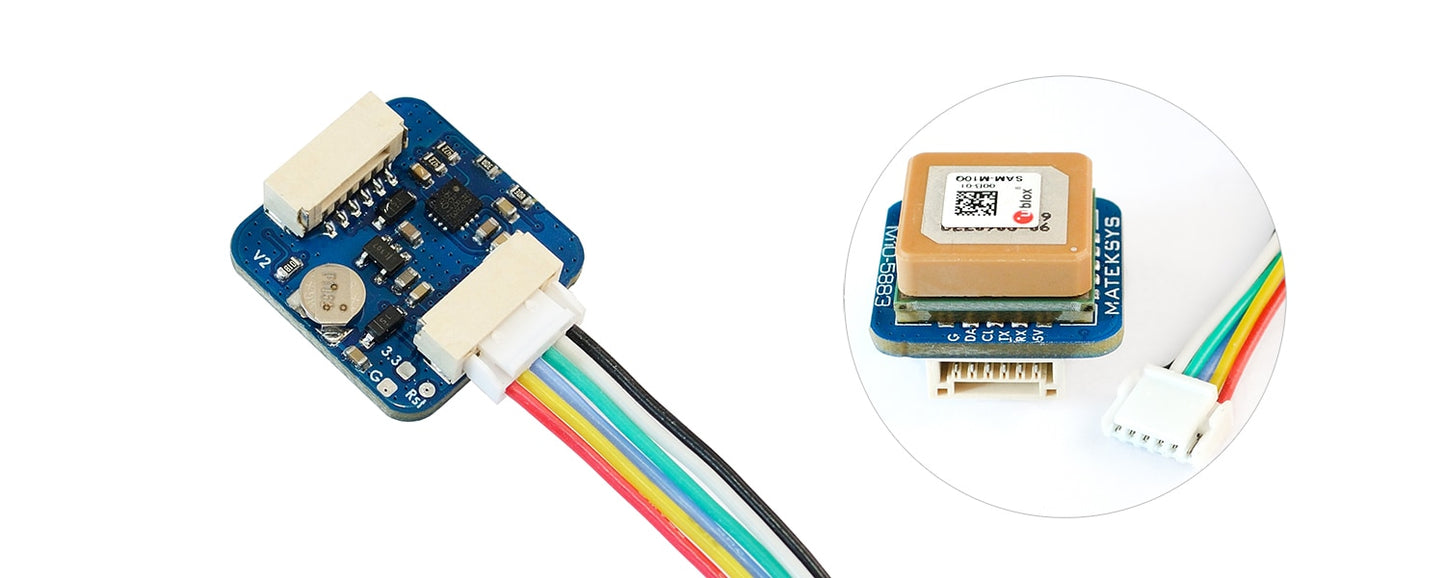
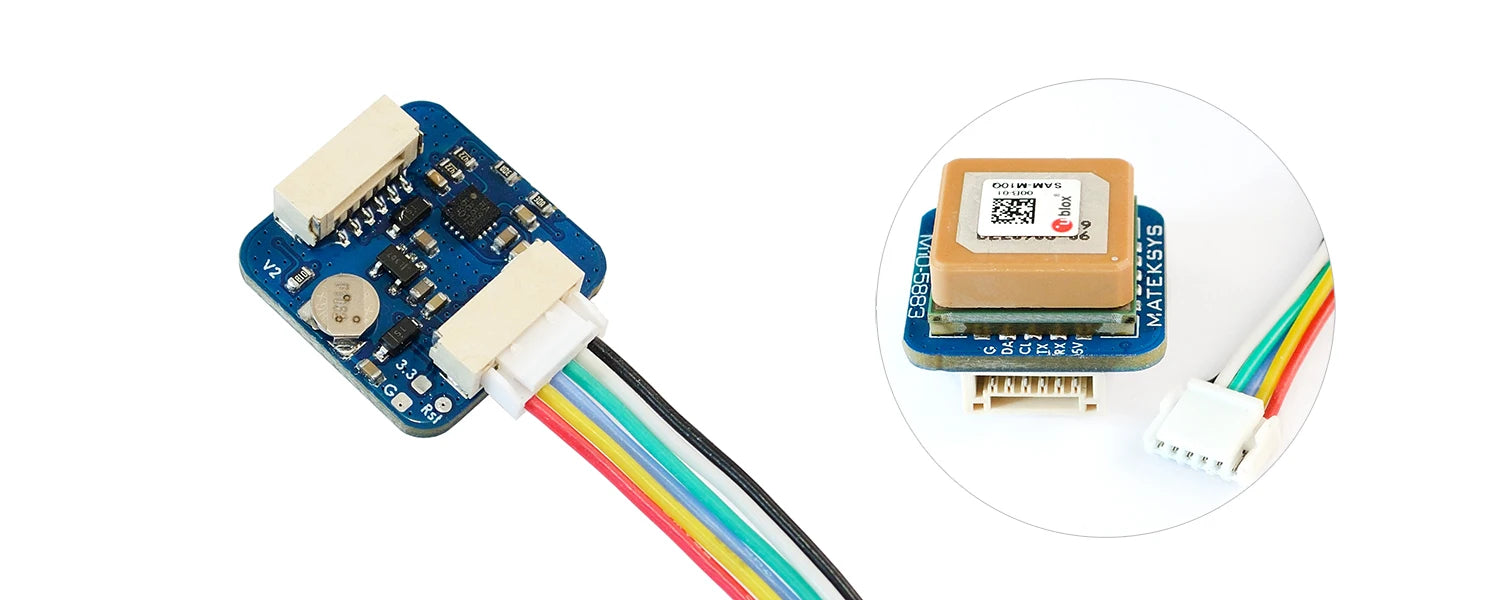
M10Q-5883 utilizza un modulo GNSS multi-costellazione alimentato da u-blox SAM-M10Q-00B.
Il SAM-M10Q è dotato della piattaforma GNSS di precisione standard u-blox M10 e offre una sensibilità eccezionale e tempo di acquisizione per tutti i segnali GNSS L1. SAM-M10Q supporta la ricezione simultanea di quattro GNSS (GPS, GLONASS, Galileo e BeiDou). L'elevato numero di satelliti visibili consente al ricevitore di selezionare i segnali migliori. Ciò massimizza la disponibilità della posizione, in particolare in condizioni difficili come nei canyon urbani profondi. La tecnologia u-blox Super-S (Super-Signal) offre un'ottima sensibilità RF e può migliorare la precisione della posizione dinamica in scenari senza linea di vista.
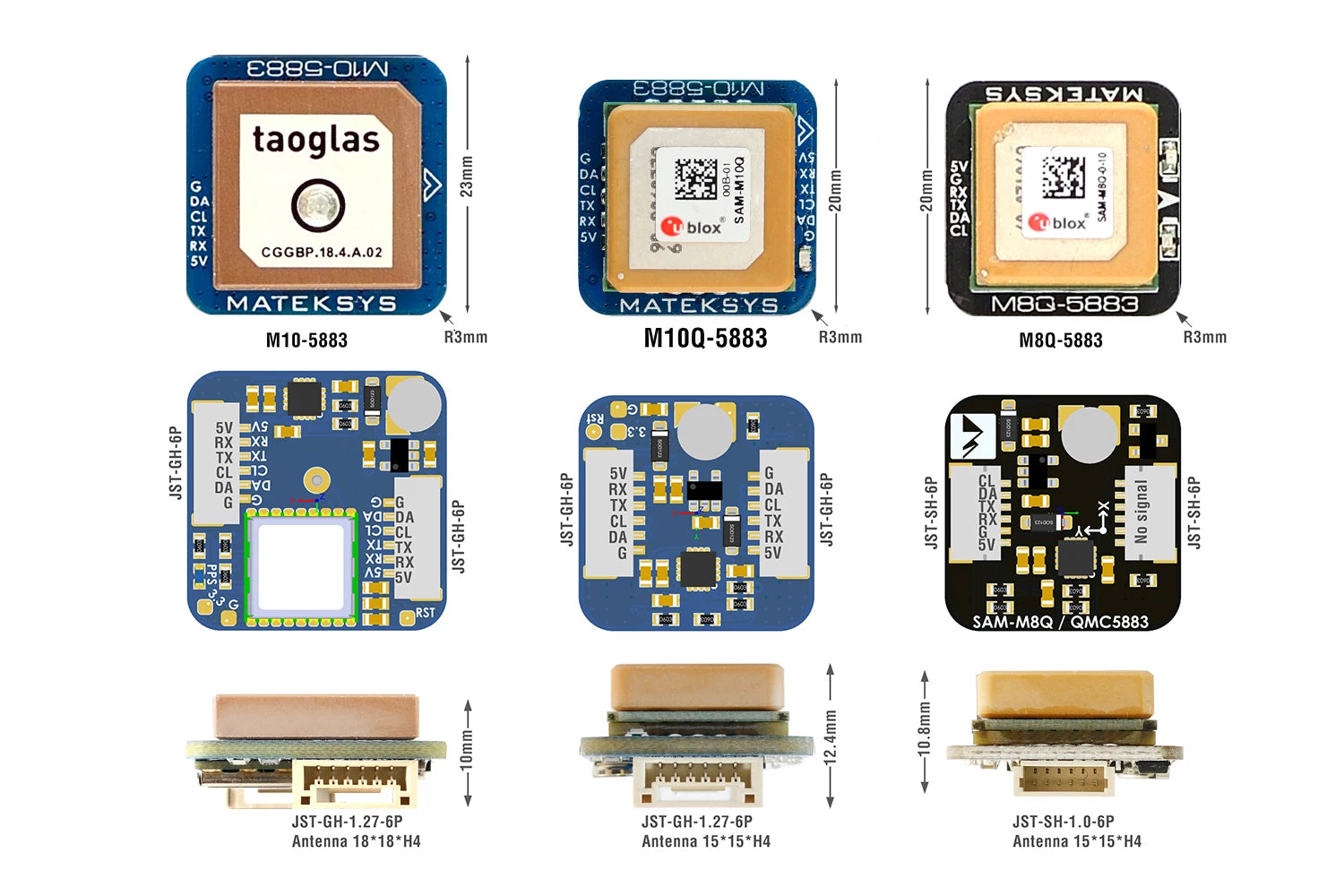
L'antenna patch ad alto guadagno da 15 x 15 mm2 fornisce il miglior equilibrio tra prestazioni e dimensioni ridotte. Il diagramma di radiazione dell'antenna omnidirezionale aumenta la flessibilità per l'installazione del dispositivo.
Maggiori dettagli su SAM-M10Q, consultare la pagina u-blox SAM-M10Q
Specifiche
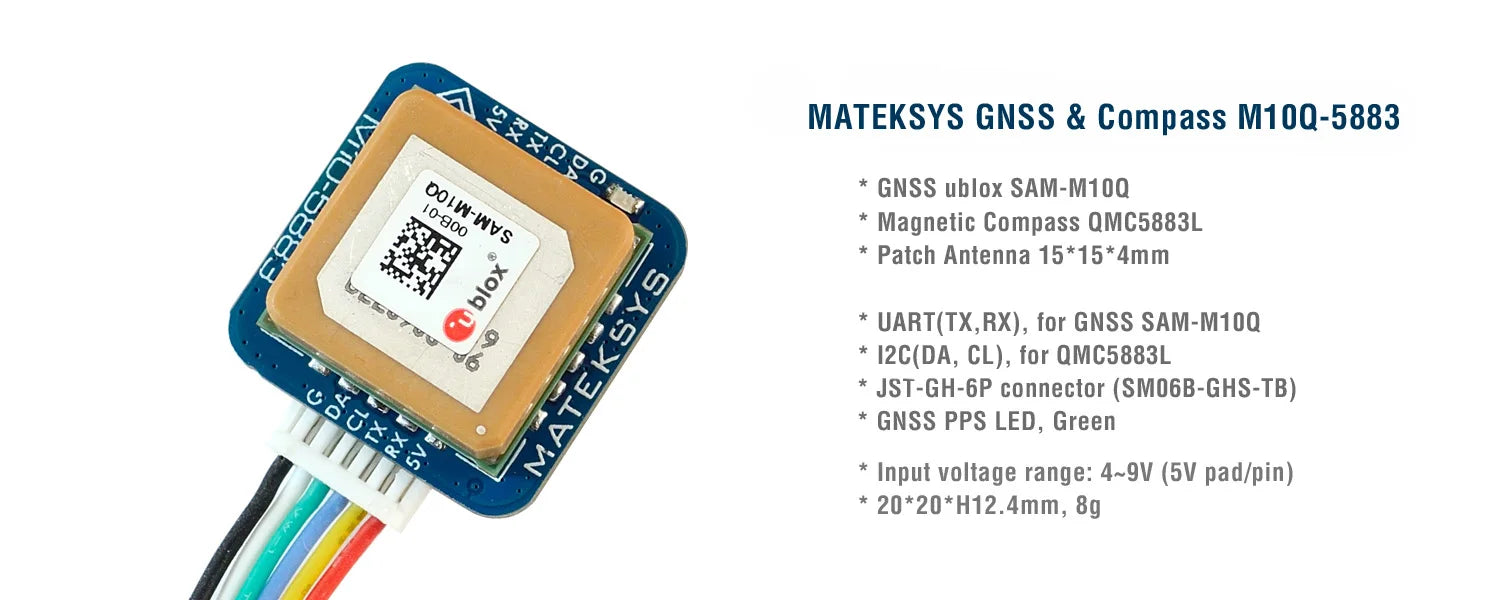
GNSS u-blox SAM-M10Q- 00B (GPS, GLONASS, Galileo e BeiDou)
Bussola magnetica QMC5883L
Antenna patch 15*15*4 mm
Intervallo di tensione in ingresso: 4~9 V (5 V pad/pin)
Consumo energetico: 13 mA
Velocità di trasmissione UART: 9600 predefinita
Temperature di funzionamento: -20~80 °C
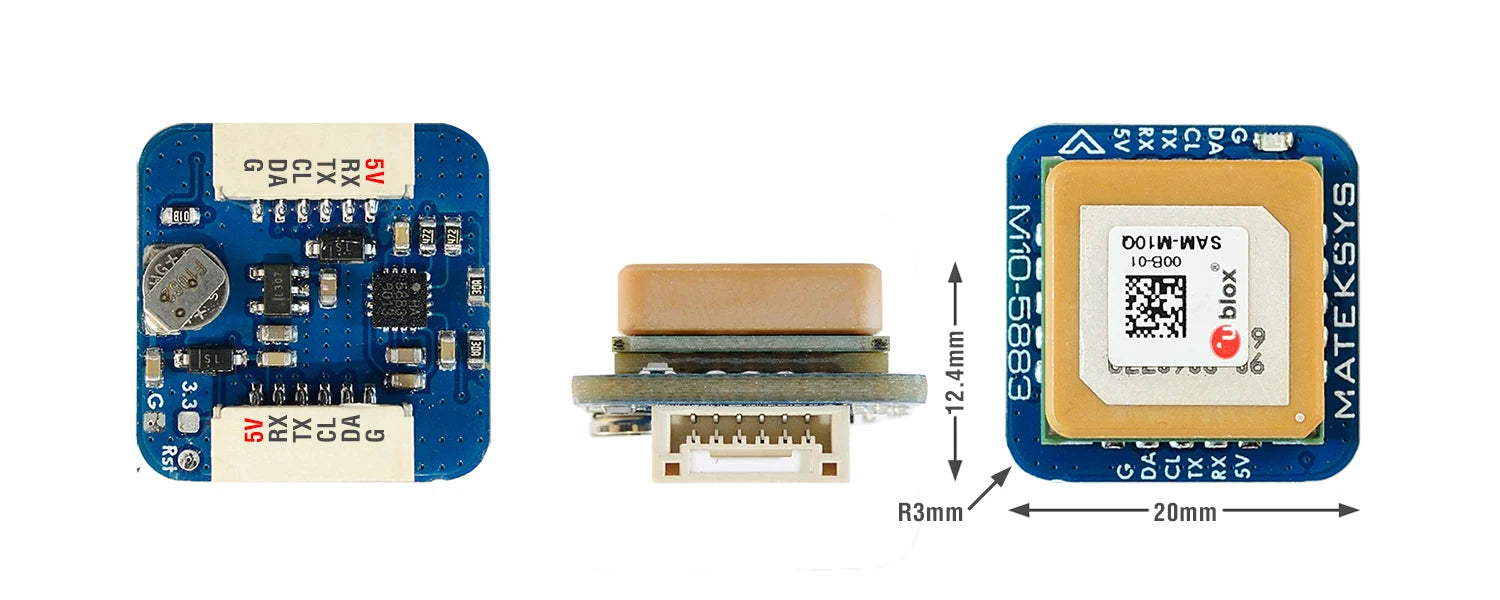
Interfaccia UART(TX, RX) per GNSS SAM-M10Q-00B
Interfaccia I2C(DA, CL) per bussola QMC5883L
Connettore JST-GH-6P (SM06B-GHS-TB). Passo 1,27 mm
LED GNSS PPS, verde. (Acceso fisso dopo l'accensione, lampeggiante (1 Hz) quando il GNSS ottiene la correzione 3D)
Protocollo: UBX(u-blox) 5Hz@GPS+GAL+BDS B1C+GLO o NMEA 1 Hz
20 mm*20 mm*12,4 mm
8 g
M10Q-5883_step.zip
Include
1x M10Q-5883
1x cavo in silicone da 20 cm da JST-GH-6P a JST-GH-6P
Cablaggio e impostazioni
M10Q-5883 5 V al controller di volo 4~9 V
M10Q-5883 RX al controller di volo UART_TX
M10Q-5883 TX al controller di volo UART_RX
M10Q-5883 CL al controller di volo I2C_SCL
M10Q- 5883 DA al controllore di volo I2C_SDA
M10Q-5883 G al controllore di volo GND
Suggerimenti e note
Allineamento della bussola (montaggio piatto): inclinare il magnetometro è fortemente sconsigliato!
INAV/BetaFLight: Freccia della bussola in avanti, imposta CW 270° Capovolgi quando la freccia del controllore di volo è rivolta in avanti.
INAV/BetaFLight: Freccia della bussola indietro, imposta CW 90° Capovolgi quando la freccia del controllore di volo è rivolta in avanti.
Ardupilot/Mission Planner: Rotazione Nessuna.
Assicurati di avere bussola/magnetometro a 10 cm di distanza da linee elettriche/ESC/motori/materiale a base di ferro
------–
INAV 5.0.0, Betaflight 4.3.0 , È richiesto ArduPilot 4.3 o versione successiva.
Le serie UBlox NEO-M9N, MAX-M10S, SAM-M10Q non dispongono di dataflash integrato.una volta spento il GNSS e il supercondensatore si esaurisce. le impostazioni torneranno ai valori predefiniti.
Il protocollo UBX è bidirezionale. Il firmware del controllore di volo può modificare le impostazioni sul GPS tramite il protocollo UBX. Non è necessario impostare i parametri del modulo GNSS in u-center.
La configurazione predefinita su SAM-M10Q con ublox FW 5.1 prevede la ricezione simultanea di GPS, Galileo, GLONASS e BeiDou B1C con QZSS e SBAS abilitati.
Inizia con u-blox GNSS FW3.01, timepulse è allineato con l'ora UTC e l'ora viene impostata come valida solo dopo il download del secondo intercalare. Potrebbero essere necessari fino a 12,5 minuti. Probabilmente il LED PPS non lampeggerà immediatamente dopo che il GPS ha corretto il 3D.
L'M10Q-5883 offre la possibilità di ripristinare il ricevitore. Collegando il pad "RST" a terra per almeno 100 ms si attiverà un avvio a freddo. RESET cancellerà tutte le informazioni e attiverà un avvio a freddo. Dovrebbe essere utilizzato solo come opzione di ripristino. Se sei sicuro che il cablaggio e la configurazione siano a posto. ma il controller di volo non riesce a rilevare il modulo GNSS (icona GPS grigia), prova a eseguire il ripristino.
I graffi sull'antenna in ceramica sono il risultato della sintonizzazione dell'antenna.
Risoluzione dei problemi relativi al GPS: http://www.mateksys.com/?p=5712#tab-id-6
u-center Windows
*** La serigrafia SKU sul primo lotto di PCB M10Q-5883 è "M10-5883".
Modulo GNSS Matek Systems (M10Q-5883 ) e modulo bussola (QMC5883L) con bussola magnetica e antenna patch, caratterizzato da dimensioni compatte di 15 mm x 15 mm x 4 mm e interfaccia UART per trasmissione e ricezione (TX/RX).
Related Collections