


MATEKSYS H7A3-SLIM Controller di Volo - ICM42688P - 30x30
MATEKSYS H7A3-SLIM Controller di Volo - ICM42688P - 30x30
MATEKSYS
Impossibile caricare la disponibilità di ritiro
Il MATEKSYS H7A3-SLIM Flight Controller offre alte prestazioni in un design compatto di 30x30mm. È dotato del MCU STM32H7A3RIT6, processore Cortex-M7 a 280MHz, 1.4MB di RAM e 2MB di Flash. Con l'IMU ICM42688P, barometro SPL06-001, OSD AT7456E e Blackbox Flash da 128MB, fornisce dati precisi e ampio logging. Il controller include 6 UART, 11 uscite PWM, 1 I2C, 1 porta CAN e 4 canali ADC. Ha anche tre LED di stato, una porta USB Type-C e un'uscita da 9V commutabile. Con un pattern di montaggio di 30.5 x 30.5mm, fori da 4mm, guarnizioni da 3mm e un peso di soli 7g, è perfetto per le gare FPV e il volo freestyle. È incluso un file step 3D per integrazione personalizzata.
Caratteristiche
- Display a schermo
- Montaggio 30x30
- Design compatto
- Connettività
- Leggero
Specifiche
Specifiche
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) con inversione integrata.
- 11x uscite PWM
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Corrente, VB2, Cur2)
- 3x LED per lo stato FC (Blu, Rosso) e indicatore 3.3V (Rosso)
- USB Tipo-C (USB2.0)
- 8 uscite PWM su 2 connettori JST-SH1.0_8pin per 2 ESC 4in1
- 1 connettore JST-GH1.25_4pin (5V/CAN-H/CAN-L/G)
- Interruttore ON/OFF per uscita 9V
- Il video digitale OSD è supportato da qualsiasi UART disponibile
Alimentazione
- Ingresso Vbat: 6~36V (2~8S LiPo)
- BEC: 5V 2A cont. (Max.3A)
- BEC: 9V 2A cont. (Max.3A)
- LDO 3.3V: Max.200mA
- Nessun sensore di corrente integrato
- Il pad ADC VB2 supporta Max. 69V (partitore di tensione: 1K:20K)
Firmware FC
- ArduPilot: MATEKH7A3 (4.6 o più recenti)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flashing con STM32CubeProgrammer
Fisico
- Montaggio: 30.5 x 30.5mm, Φ4mm con guarnizioni Φ3mm
- Dimensioni: 36 x 36 x 5 mm
- Peso: 7g
- Passo 3D H7A3-SLIM_step.zip
Incluso
- 1x H7A3-SLIM
- 6x guarnizioni in silicone M4 a M3
- 2x JST-SH1.0_cavo 8pin, 5cm, & connettori 8pin
- 1x cavo JST-GH-4P a JST-GH-4P per porta CAN, 20cm
Dettagli

Il controller di volo MATEKSYS H7A3-SLIM utilizza un MCU STM32H7A3 con IMU ICM42688P e una porta USB-C in un modello di montaggio di 30,5 mm.

Il controller di volo MATEKSYS H7A3-SLIM utilizza un layout compatto 30x30 con una porta USB-C e pad chiaramente etichettati per un cablaggio ordinato.

MATEKSYS H7A3-SLIM utilizza connettori JST-SH 1.0 a 8 pin duali più una porta JST-GH a 4 pin e USB Type-C per un cablaggio ordinato e una facile configurazione.

MATEKSYS H7A3-SLIM utilizza pad di saldatura e porte chiaramente etichettati per video camera/VTx, UART, CAN e connessioni di alimentazione.
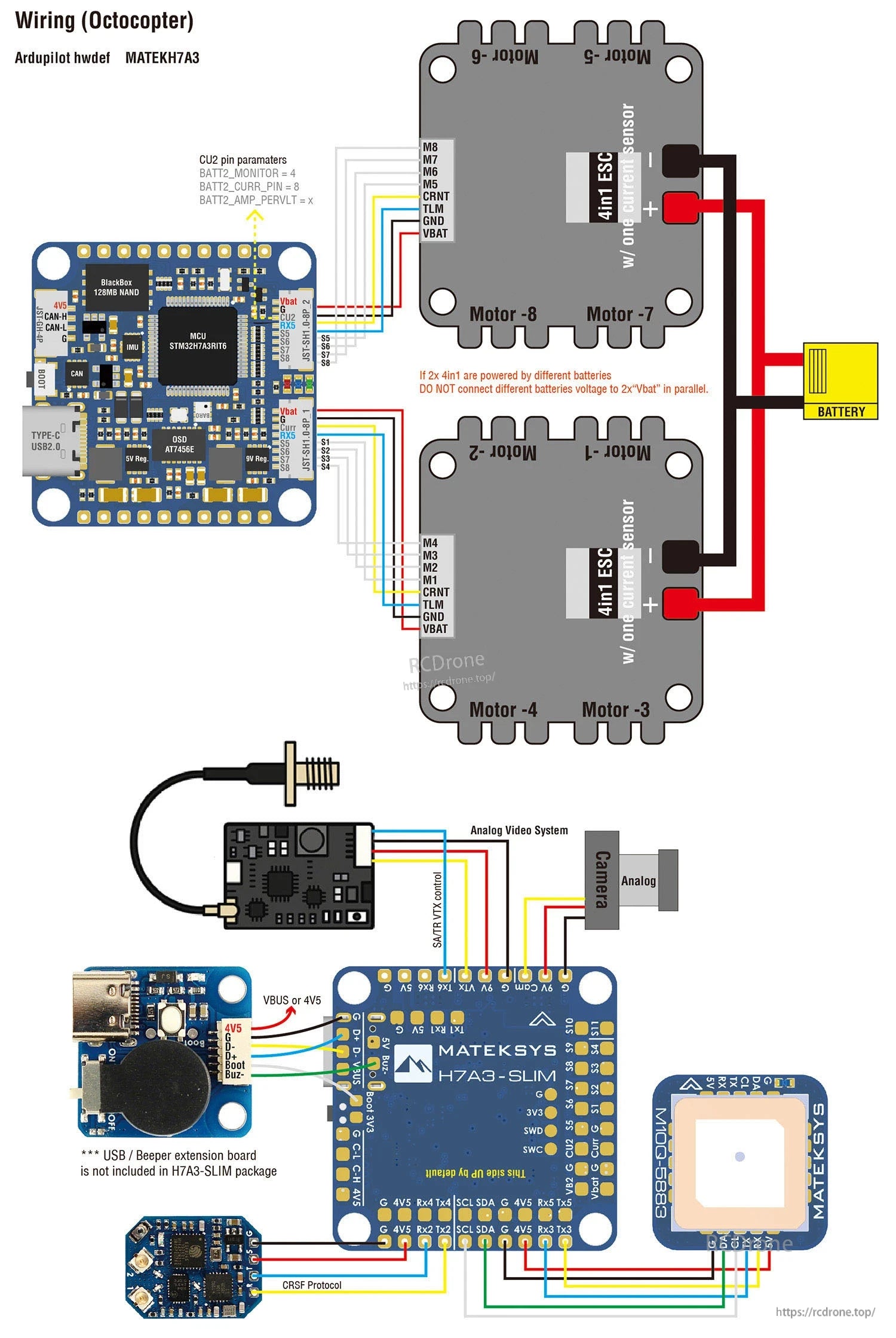
MATEKSYS H7A3-SLIM utilizza pad chiaramente etichettati per collegare ESC duali 4-in-1, alimentazione VBAT, GPS, ricevitore e componenti video analogici.

mappatura ArduPilot
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | I/O tollerante a 5 V | TIM1_CH2 | DMA/Bi-DShot | Gruppo1 |
| S2 | PWM2 GPIO51 | I/O tollerante a 5 V | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | I/O tollerante a 5 V | TIM2_CH1 | DMA/Bi-DShot | Gruppo2 | |
| S4 | PWM4 GPIO53 | I/O tollerante a 5 V | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | I/O tollerante a 5 V | TIM3_CH3 | DMA/Bi-DShot | Gruppo3 | |
| S6 | PWM6 GPIO55 | I/O tollerante a 5 V | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | I/O tollerante a 5 V | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | I/O tollerante a 5 V | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | I/O tollerante a 5 V | TIM4_CH1 | DMA/DShot | Gruppo4 | |
| S10 | PWM10 GPIO59 | I/O tollerante a 5 V | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tollerante I/O | TIM16_CH1 | DMA/DShot | Gruppo5 | |
| PWM1~PWM11 sono compatibili con Dshot e PWM.Tuttavia, mescolare Dshot e normale funzionamento PWM per le uscite è limitato a gruppi, cioè, abilitare Dshot per un'uscita in un gruppo richiede che TUTTE le uscite in quel gruppo siano configurate e utilizzate come Dshot, piuttosto che come uscite PWM. Se servo e motore sono mescolati nello stesso gruppo, assicurati che questo gruppo funzioni alla frequenza PWM più bassa secondo le specifiche del servo. Vale a dire. Se il servo supporta un massimo di 50Hz, l'ESC deve funzionare a 50Hz in questo gruppo. |
||||||
| PINIO | Interruttore 9V | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Punto Vbat | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Punto Curr | BATT_CURRENT_SENS | 0~3.3V | PINO_CORRENTE_BATT AMP_BATT_PER_VOLT |
11 X |
||
| Pad VB2 | SENS_VOLT_BATT2 | 0~69V | PINO_VOLT_BATT2 MULT_VOLT_BATT2 |
18 21.0 |
||
| Pad CU2 | SENS_CORRENTE_BATT2 | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | I/O tollerante 5V | sul Baro SPL06-001 a bordo | Indirizzo | 0x76 |
| Velocità dell'aria digitale I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometro | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | I/O tollerante 5V | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
PUÒ GPS PUÒ Bussola PUÒ Sensore di velocità dell'aria |
TIPO_GPS MASCHERA_TIPO_BUSSOLA TIPO_ARSPD |
9 0 8 |
| UART | USB | USB | console | PROTOCOLLO_SERIAL0 | 2 | |
| TX1 RX1 | USART1 con DMA | I/O tollerante a 5 V | Telemetria | PROTOCOLLO_SERIAL1 | 2 | |
| TX2 RX2 | USART2 con DMA | I/O tollerante a 5 V | Ingresso RC/Ricevitore | PROTOCOLLO_SERIAL2 | 23 | |
| TX3 RX3 | USART3 con DMA | I/O tollerante a 5 V | GPS | PROTOCOLLO_SERIAL3 | 5 | |
| TX4 RX4 | UART4 senza DMA | I/O tollerante a 5 V | Riserva | PROTOCOLLO_SERIAL4 | -1 | |
| TX5 RX5 | UART5 senza DMA | I/O tollerante a 5 V | Riserva | PROTOCOLLO_SERIAL5 | -1 | |
| TX6 RX6 | USART6 senza DMA | I/O tollerante a 5 V | Riserva | PROTOCOLLO_SERIAL6 | -1 | |
INPUT RC
L'input RC è configurato su USART2 (SERIAL2).Supporta tutti i protocolli RC seriali. SERIAL2_PROTOCOL=23 per impostazione predefinita.
- PPM non è supportato.
- CRSF richiede la connessione Tx2 & Rx2, e impostare SERIAL2_OPTIONS su “0” (predefinito).
- SBUS/DSM/SRXL si collega al pin Rx2, ma SBUS richiede che SERIAL2_OPTIONS sia impostato su “3”.
- FPort richiede la connessione a Tx2, e impostare SERIAL2_OPTIONS su “7”. Se la Telemetria non funziona, prova a impostare SERIAL7_OPTIONS = 135.
- SRXL2 richiede una connessione a Tx2 e fornisce automaticamente telemetria. Imposta SERIAL2_OPTIONS su “4”.
- Qualsiasi UART può essere utilizzata per le connessioni del sistema RC in ArduPilot e è compatibile con tutti i protocolli tranne PPM. Vedi Sistemi di Controllo Radio per dettagli.
ArduPilot Relay(PINIO)
- Uscita 9V ON per impostazione predefinita
- PC13 PINIO1 USCITA GPIO(81) // alimentazione 9V switche.g.
- FUNZIONE_RELAY1 1
- PIN_RELAY1 81 // PINIO1 GPIO
- OPZIONE_RC7 28 // Relay On/Off, Usa CH7 del Trasmettitore per impostare 9V ON/OFF
La funzione configurata verrà attivata quando il valore pwm dell'interruttore ausiliario supera 1800. Sarà disattivata quando il valore scende sotto 1200.
Controlla il valore pwm inviato dal trasmettitore quando l'interruttore è alto e basso utilizzando la schermata di Configurazione Iniziale >> Hardware Obbligatorio >> Calibrazione Radio del Mission Planner.Se non sale sopra 1800 o scende sotto 1200, è meglio regolare i punti finali del servo nel trasmettitore.
Related Collections


