




BetaFPV Matrix 1S Flight Controller Brushless AIO 3IN1/4IN1, STM32G473, ELRS 2.4G, 12A/18A
BetaFPV Matrix 1S Flight Controller Brushless AIO 3IN1/4IN1, STM32G473, ELRS 2.4G, 12A/18A
BETAFPV
Impossibile caricare la disponibilità di ritiro
Panoramica
Il BetaFPV Matrix 1S Controller di Volo Brushless è una piattaforma di controller di volo 1S whoop offerta in due versioni: Matrix 1S 3IN1 (FC + ESC + ricevitore Serial ELRS 2.4GHz integrato; senza OSD analogico) e Matrix 1S 4IN1 (aggiunge OSD Betaflight e pad di saldatura per un VTX analogico esterno). Utilizza il MCU STM32G473CEU6 e un layout della scheda in stile cross, ed è progettato per un'installazione semplice su micro build 1S.
Caratteristiche principali
- Due architetture: 3IN1 per build digitali HD (con porta VTX digitale HD SH1.0-6Pin e spine del motore) e 4IN1 per build analogiche (con OSD e pad di saldatura per VTX analogico esterno).
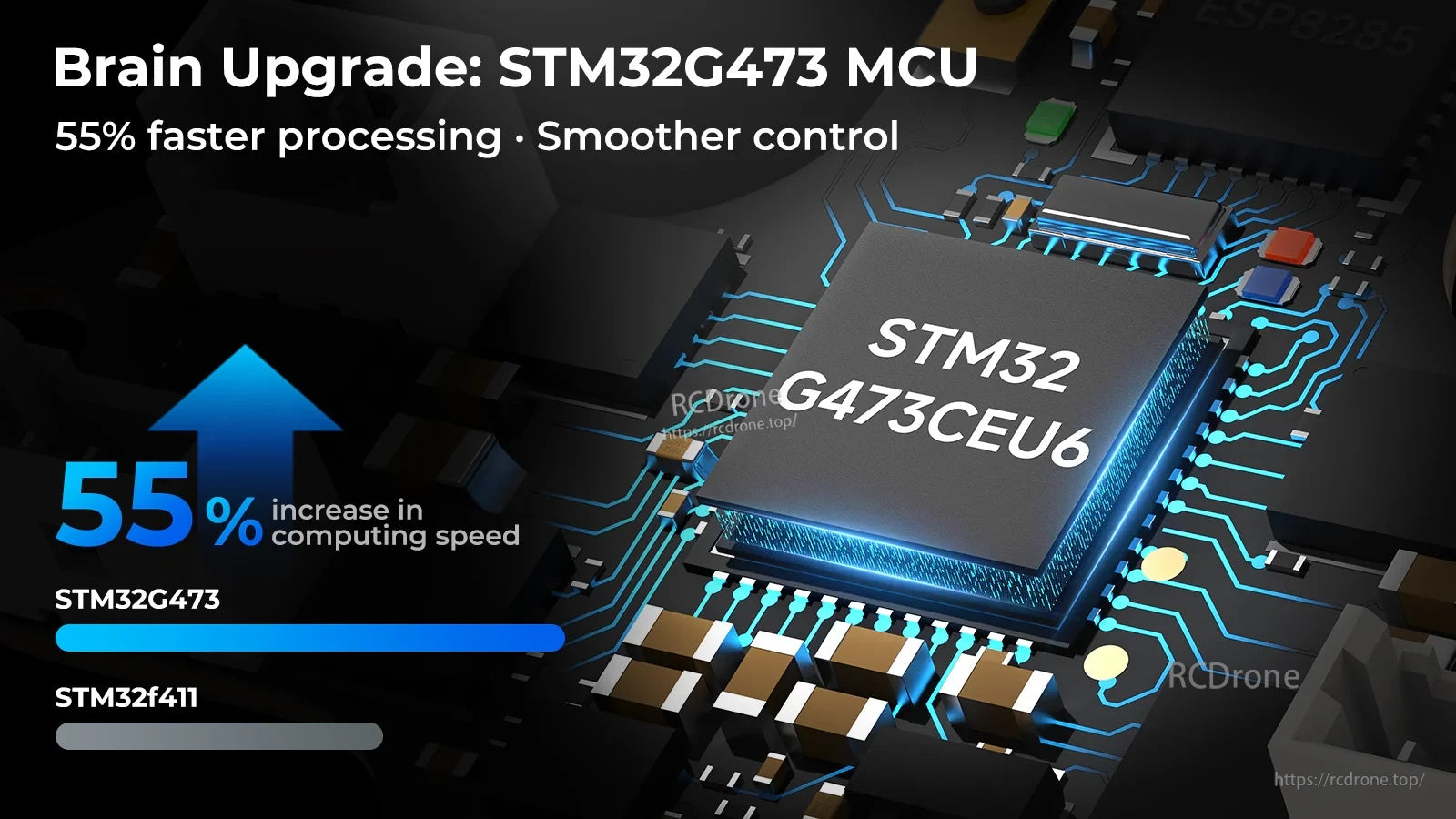
- MCU: STM32G473CEU6 (168MHz); dichiarato come 55% più veloce nel processamento rispetto a F411.
- Uscita ESC: 12A continua, 18A di picco; supporta DSHOT300 e DSHOT600.
- Nuovo BEC: 5V/3A; design dell'alimentazione LDO 3.3V indipendente dall'IMU.
- Ricevitore Serial ELRS 2.4GHz integrato (V3.4.3), protocollo CRSF.
- Nota sulla durata: scheda da 1 mm; caratteristiche di installazione orientata senza saldature nella versione 3IN1.
Specifiche
Controllore di volo (FC)
| MCU | STM32G473CEU6 (168MHz) |
| Giroscopio | ICM42688P |
| Frequenza di campionamento massima del giroscopio (tabella di confronto) | ICM42688P, 8KHz |
| Memoria Blackbox | 16MB (mostrato anche come 16M) |
| Sensore | Voltaggio & corrente |
| BEC | 5V/3A |
| Alimentazione IMU indipendente | 3.3V LDO (LDO indipendente IMU) |
| ESC (a bordo) | 12A continuo |
| RX | Seriale ELRS 2.4GHz (V3.4.3) |
| Porta USB | SH1.0-4Pin |
| Connettore della batteria | BT2.0 |
| Spina del motore | JST1.25-3Pin (mostrato anche come JST1.25) |
| Dimensione di montaggio | 25.5mm x 25.5mm |
I/O specifici per versione
| UART (3IN1) | UART 1 (solo RX/SBUS), UART 2 (libero), UART 3 (per RX), UART 4 (libero/HD MSP) |
| UART (4IN1) | UART 1 (per VTX), UART 2 (libero), UART 3 (per RX), UART 4 (NESSUNO) |
| OSD | AT7456E (solo versione 4IN1) |
| Porta VTX digitale HD | SH1.0-6Pin (solo versione 3IN1) |
Peso
| 3IN1 | 3.8±0.1g (connettore della batteria escluso); 4.2±0.1g (connettore della batteria incluso) |
| 4IN1 | 3.6±0.1g (connettore della batteria escluso); 4.6±0.1g (connettore della batteria incluso) |
ESC
| Ingresso di alimentazione | Solo 1S |
| Corrente | 12A continuo, 18A di picco |
| Protocollo del segnale digitale | DSHOT300, DSHOT600 |
| Firmware ESC | A_X_5_96_v0.19.2.hex per firmware BB51 Bluejay |
Tabella di confronto (come fornita)
| Matrix 1S 3IN1 | Matrix 1S 4IN1 | F4 1S 5A AIO | |
| MCU | STM32G473CEU6 | STM32F411CEU6 | |
| Frequenza MCU | 168MHz | 108MHz | |
| Gyro, frequenza di campionamento max. | ICM42688P, 8KHz | BMI270, 3.2KHz | |
| ESC | 12A continuo | 1S, 5A | |
| Memoria Blackbox | 16M | 8M | |
| OSD | - | Betaflight OSD: AT7456E | |
| RX | ELRS 2.4GHz seriale a bordo | ||
| Spina del motore | JST1.25 | ||
| Peso | 3.8g | 3.6g | 3.64g |
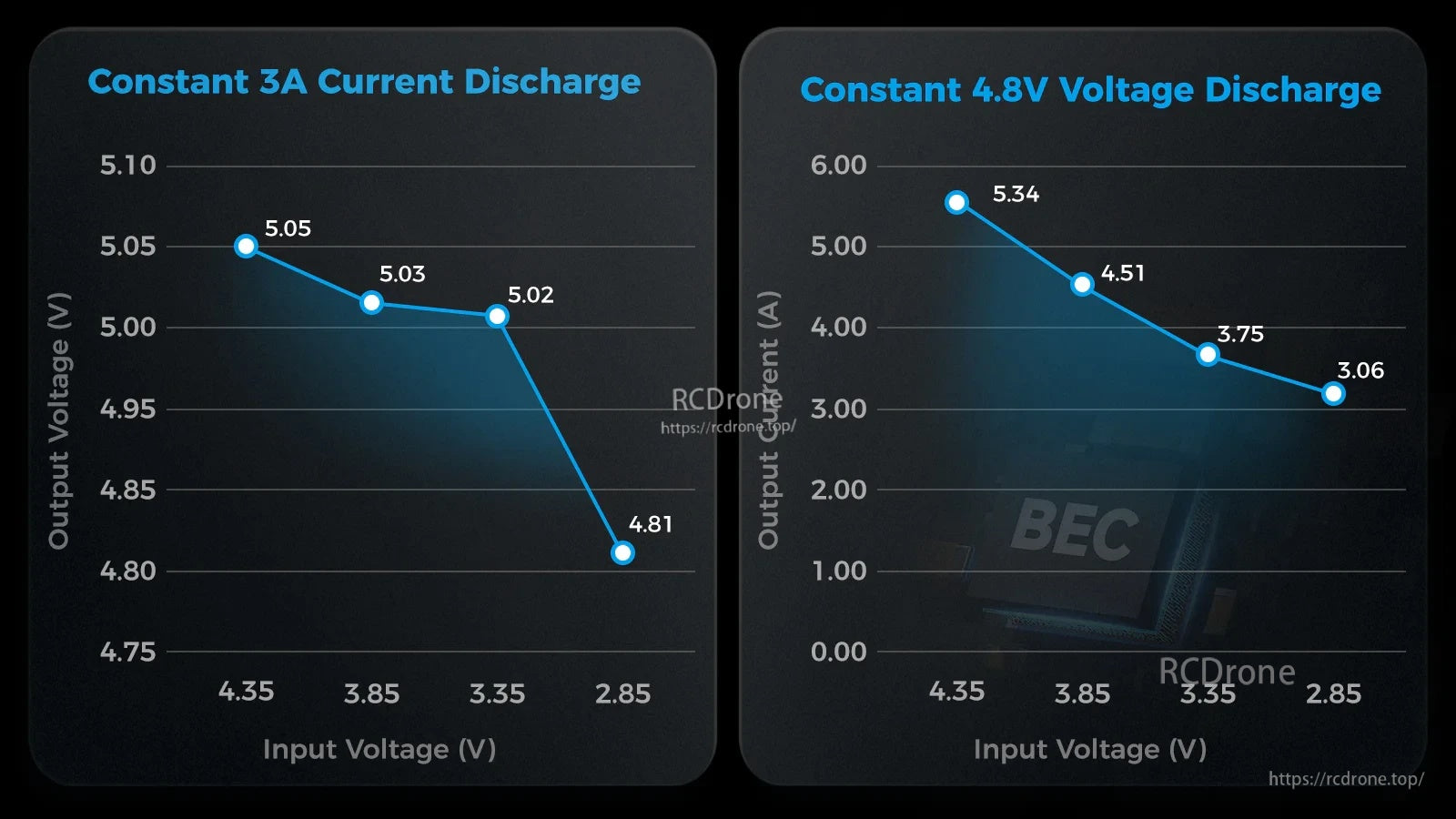
Dati di test BEC (come mostrato)
- Scarico di corrente costante 3A: Ingresso 4.35V → Uscita 5.05V; 3.85V → 5.03V; 3.35V → 5.02V; 2.85V → 4.81V
- Scarico di tensione costante 4.8V: Ingresso 4.35V → Uscita 5.34A; 3.85V → 4.51A; 3.35V → 3.75A; 2.85V → 3.06A
Porti & Note di configurazione (dai diagrammi)
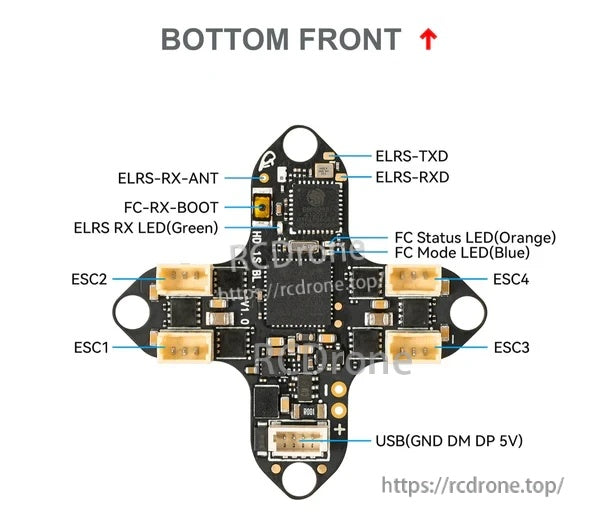
- Pinout USB mostrato: USB (GND, DM, DP, 5V).
- Le etichette della scheda 3IN1 mostrate includono: RX3, RX2, TX2, TX3; BATT-, BATT+(1S), 5V, GND; SBUS (RX1), RX4, TX4; LED; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; FC-RX-BOOT; ELRS RX LED (Verde); FC Status LED (Arancione); FC Mode LED (Blu); ESC1/ESC2/ESC3/ESC4.
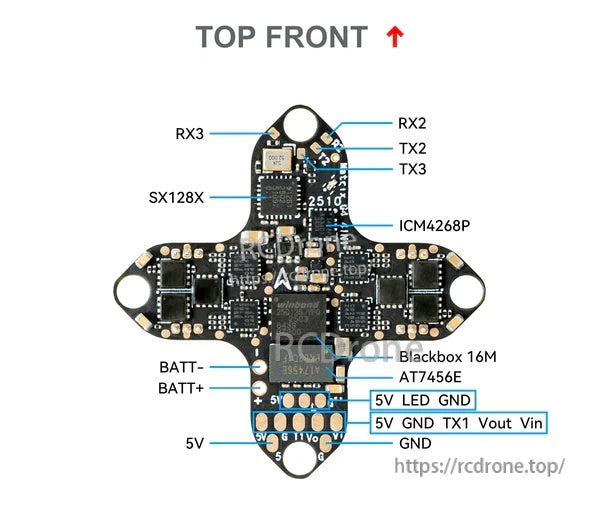
- Le etichette della scheda 4IN1 mostrate includono: SX128X; ICM42688P; Blackbox 16M; AT7456E; ELRS-RX-ANT; ELRS-TXD, ELRS-RXD; ESP8285; STM32G473; FC-RX-BOOT; FC Status LED; FC-Mode LED; ESC1/ESC2/ESC3/ESC4; oltre alle etichette dei pad che includono 5V/LED/GND e 5V/GND/TX1/Vout/Vin.
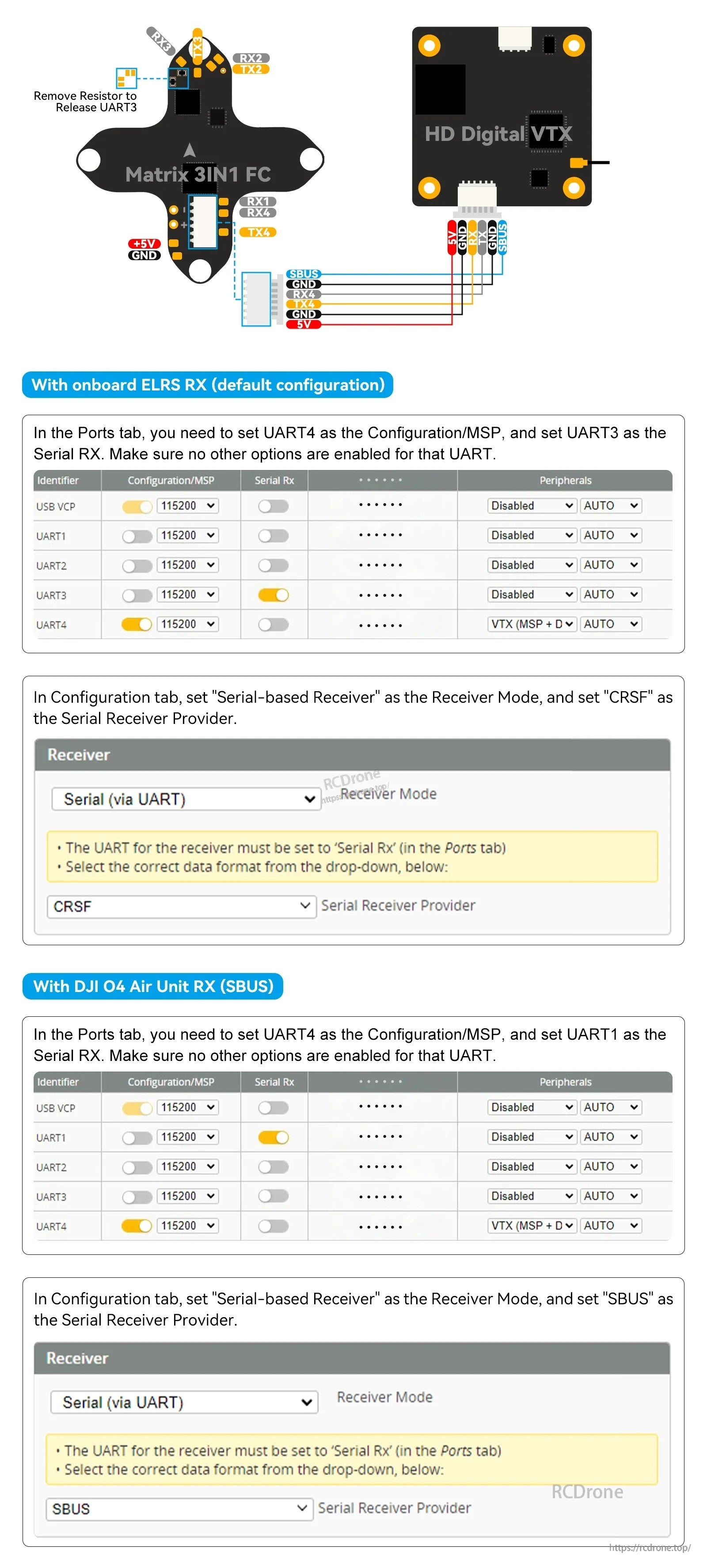
Configurazione delle porte Betaflight mostrata (3IN1)
- Con ELRS RX a bordo (predefinito): impostare UART4 su Configuration/MSP e UART3 su Serial RX (nessuna altra opzione abilitata per UART3). Modalità ricevitore: Ricevitore basato su seriale; Fornitore ricevitore seriale: CRSF.
- Con DJI O4 Air Unit RX (SBUS): impostare UART4 su Configuration/MSP e UART1 su Serial RX (nessuna altra opzione abilitata per UART1). Modalità Ricevitore: Ricevitore basato su seriale; Fornitore Ricevitore Serial: SBUS.
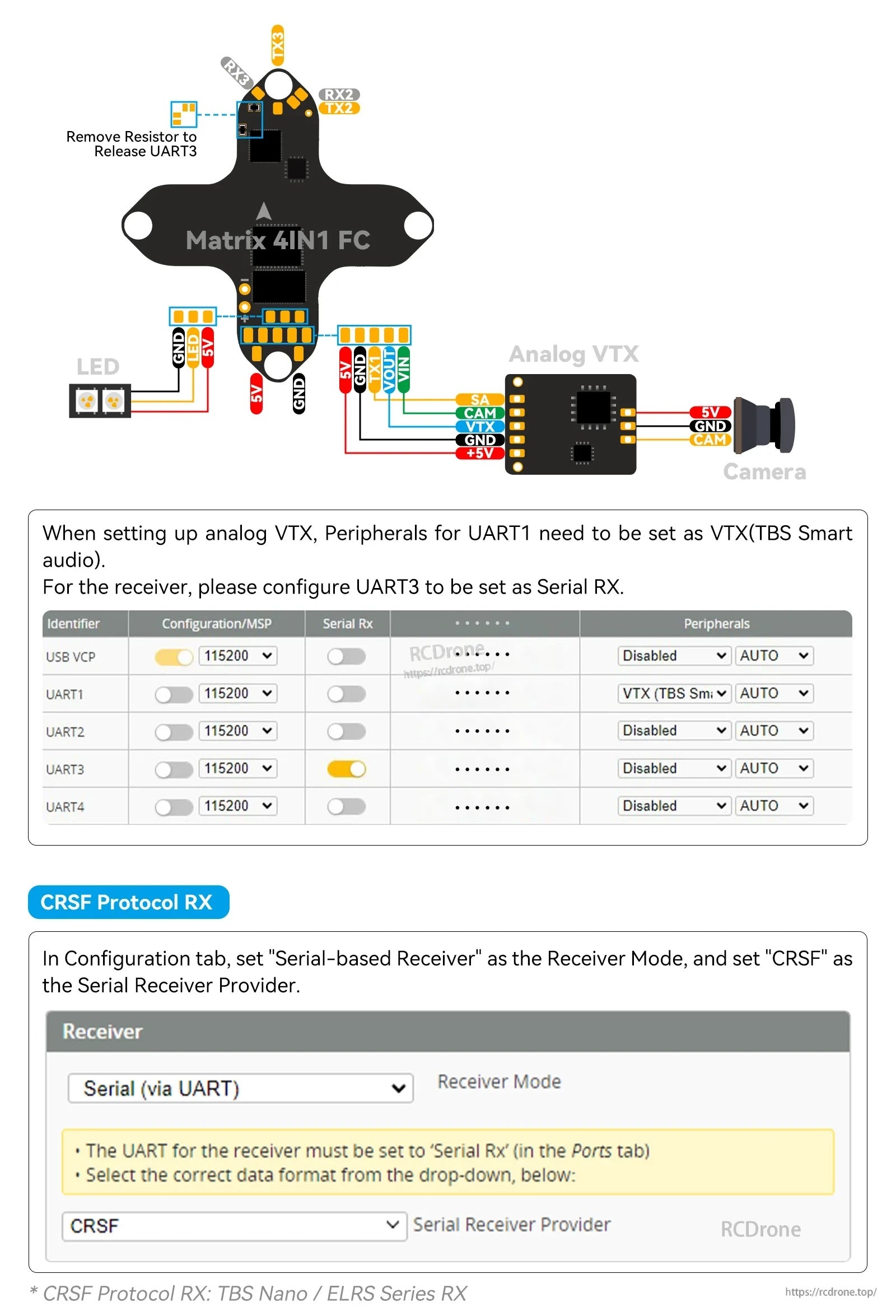
Configurazione delle porte Betaflight mostrata (4IN1)
- Quando si configura VTX analogico: impostare le periferiche per UART1 su VTX (TBS Smart audio).
- Per il ricevitore: configurare UART3 come RX Seriale.
- Nota RX Protocollo CRSF mostrata: TBS Nano / ELRS Serie RX.
Firmware
- Firmware FC (3IN1): Betaflight_4.5.1_BETAFPVG473
- Firmware FC (4IN1): Betaflight_4.5.2_BETAFPVG473_V2
- Firmware base ESC (BB51 Bluejay): A_X_5_96_v0.19.2.hex (supporta DSHOT300/DSHOT600; menziona opzioni di frequenza PWM fissa a 24KHz/48KHz/96KHz e melodie di avvio personalizzate)
Importante: A partire dal 5 gennaio 2026, il FC 3IN1 è dichiarato per essere spedito con un giroscopio BMI270. Verificare la versione del giroscopio prima di flashare il firmware. Il Matrix 1S 3IN1 e 4IN1 richiedono firmware diversi.
Nota: Evitare di caricare il firmware ESC con un intervallo più breve; è stato dichiarato che ciò potrebbe aumentare la possibilità di blocchi e danneggiare il controller di volo.
Manuali & Download
- Firmware 3IN1 + dump CLI: https://support.betafpv.com/hc/en-us/articles/41037090524697-Firmware-for-Matrix-1S-Brushless-Flight-Controller-3IN1-HD
- Firmware 4IN1 + dump CLI: https://support.betafpv.com/hc/en-us/articles/48215862783769-Firmware-for-Matrix-1S-Brushless-Flight-Controller-4IN1
- Note di rilascio di Betaflight 4.5.1: https://github.com/betaflight/betaflight/releases/tag/4.5.1
- Note di rilascio di Betaflight 4.5.2: https://github.com/betaflight/betaflight/releases/tag/4.5.2
- Progetto Bluejay: https://github.com/bird-sanctuary/bluejay
- Rilasci Bluejay: https://github.com/bird-sanctuary/bluejay/releases
- Configuratore ESC: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Guida al flashing del firmware ELRS: https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
Cosa è incluso
Pacchetto del controller di volo brushless Matrix 1S (3IN1)
- 1 * Controller di volo brushless Matrix 1S (3IN1)
- 1 * Adattatore Type-C a SH1.0
- 1 * Cavo adattatore SH1.0-4Pin
- 1 * Cavo adattatore SH1.0-6Pin
- 4 * M1.2*4 Viti autofilettanti
- 4 * M1.4*5 Viti autofilettanti
- 4 * Palline ammortizzanti
Pacchetto del Controller di Volo Brushless Matrix 1S (4IN1)
- 1 * Controller di Volo Brushless Matrix 1S (4IN1)
- 1 * Adattatore da Type-C a SH1.0
- 1 * Cavo Adattatore SH1.0-4Pin
- 4 * M1.2*4 Viti autofilettanti
- 4 * M1.4*5 Viti autofilettanti
- 4 * Palline ammortizzanti
Attenzione
- Progettato per i neofiti e i piloti ricreativi, il Matrix FC utilizza una scheda da 1 mm per la durata ed è progettato per un'installazione facile.
- I controller di volo sono coperti per difetti di fabbricazione. I problemi derivanti da errori dell'utente, danni fisici da incidenti, danni durante l'installazione o lo smontaggio, modifiche, picchi di tensione, incendi elettrici o esposizione all'acqua non sono coperti.
Per domande di compatibilità (selezione 3IN1 vs 4IN1, cablaggio o firmware), contattare il supporto a https://rcdrone.top/ o [email protected].
Dettagli

Scegli tra la scheda 3IN1 per costruzioni digitali HD e l'opzione 4IN1 che aggiunge supporto per Betaflight OSD e VTX analogico.


Il BEC aggiornato 5V/3A è caratterizzato da un'uscita stabile su tensioni di ingresso tipiche da 1S.

I connettori senza saldatura semplificano le installazioni, con una porta VTX digitale HD dedicata e cavi di motore plug-in.

Per costruzioni analogiche, la versione 4IN1 fornisce pad di saldatura per cablare un VTX analogico esterno.

Le note di configurazione coprono la mappatura delle porte Betaflight comune per costruzioni digitali HD e il ricevitore Serial ELRS integrato.
Le linee guida di configurazione si concentrano sul cablaggio del VTX analogico e sulle impostazioni CRSF per il ricevitore Serial ELRS integrato.

Gli accessori inclusi supportano un rapido montaggio e installazione, con un adattatore USB, cavo e hardware di montaggio.

Related Collections





