

MUWEIDU K12060 Motore 24V 60W Brushless DC FOC Servo con Encoder 18bit, RS485/CAN, 115rpm
MUWEIDU K12060 Motore 24V 60W Brushless DC FOC Servo con Encoder 18bit, RS485/CAN, 115rpm
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU Il motore K12060 è un motore DC senza spazzole motore servo (motore DC senza spazzole di media-alta velocità della serie K) con design di azionamento elettrico integrato (driver integrato) e un encoder magnetico. Supporta il controllo di velocità/posizione e comunicazione RS485 o CAN, ed è progettato per giunti robotici e di automazione compatti e integrati.
Caratteristiche principali
- Motore servo FOC ad alte prestazioni
- Design del drive elettrico integrato: driver e encoder magnetico incorporati
- Design integrato / leggero / ad alta precisione / ad alta coppia
- Precisione dell'encoder aggiornata da 14-bit a 18-bit
- Coppia di cogging del motore ottimizzata
- Ingresso PWM supportato
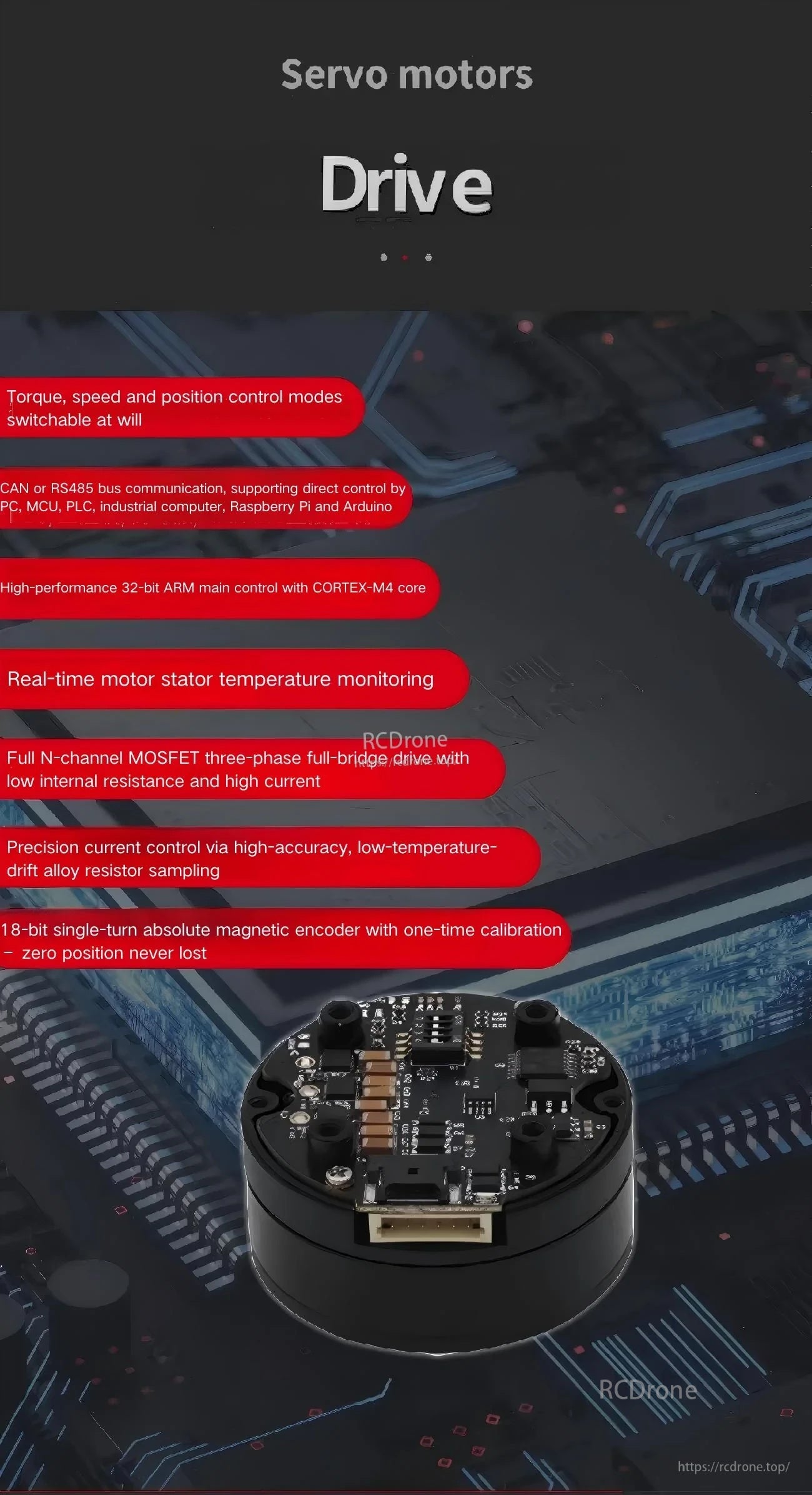
- Modalità di controllo di coppia, velocità e posizione commutabili a piacere
- Comunicazione bus CAN o RS485; supporta il controllo diretto da PC, MCU, PLC, computer industriale, Raspberry Pi e Arduino
- Controllo principale ad alte prestazioni a 32-bit con core CORTEX-M4
- Monitoraggio in tempo reale della temperatura dello statore del motore
- Drive a ponte completo trifase N-channel MOSFET con bassa resistenza interna e alta corrente
- Controllo di corrente di precisione tramite campionamento di resistori in lega ad alta precisione e bassa deriva termica
- Encoder magnetico assoluto a singolo giro da 18 bit con calibrazione una tantum; posizione zero mai persa
- Design leggero: struttura piatta in materiale alluminio di grado aeronautico
- Alta coppia di uscita: rotore esterno abbinato a magneti in neodimio ferro boro
- Design del prodotto ultra-alto standard
Specifiche
| Modello | K12060 |
| Tensione nominale | 24V |
| Corrente nominale | 4A |
| Potenza di picco | 60W |
| Coppia nominale | 5N.m |
| Momento di picco | 10N.m |
| Velocità Valutata | 115rpm |
| Encoder | 18bit |
| Inerzia del Rotore | 5500gcm^2 |
| Monitoraggio della Temperatura del Motore | SI |
| Modalità di Controllo | Velocità/Posizione |
| Protocollo di Comunicazione | RS485 o CAN |
| Dimensioni Complessive | Phi120mm x 49mm |
| Peso | 1147g |
Definizione dell'Interfaccia
- ID SWITCH
- CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Alimentazione Negativa |
| V- | Alimentazione Negativa |
| V+ | Alimentazione Positiva |
| V+ | Alimentazione Positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND Segnale |
Applicazioni
- Robot Umani
- Bracci Robotici
- Eseoscheletri
- Robot Quadrupedi
- Veicoli AGV
- Robot ARU
- Robot di Ispezione
- Camera Portatile
- LiDAR
- Supporto Gimbal
Per indicazioni di integrazione e domande pre-vendita (cablaggio di comunicazione, modalità di controllo e documentazione), contattare [email protected] or visita https://rcdrone.top/ .
Manuali
Dettagli

Un motore servo FOC della serie K compatto, progettato per giunti robotici integrati, che combina il motore, driver e encoder in un'unica custodia.

Il design del sistema di azionamento elettrico integrato riduce il cablaggio e risparmia spazio combinando il motore, l'elettronica del driver e l'encoder magnetico.
Passa tra il controllo di coppia, velocità e posizione, con comunicazione CAN o RS485 per PC, MCU, PLC o controller embedded.

Le etichette dell'interfaccia chiara includono un interruttore ID e pin dedicati per alimentazione, bus CAN/RS485 e connessioni di segnale UART.

Strumenti basati su PC supportano la regolazione dei parametri, il testing e gli aggiornamenti del firmware attraverso più modalità di controllo.

Ben adatto per costruzioni di automazione e robotica come piattaforme di ispezione, stabilizzazione della fotocamera, LiDAR e pod gimbal.
Related Collections

