

MUWEIDU K9050 Motore FOC Servo, Encoder 18-bit 24V, RS485/CAN, Controllo Velocità/Posizione (16T/35T)
MUWEIDU K9050 Motore FOC Servo, Encoder 18-bit 24V, RS485/CAN, Controllo Velocità/Posizione (16T/35T)
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU K9050 Motore è un motore DC senza spazzole servo motore FOC con un design di guida integrato (driver incorporato) e un encoder magnetico. Supporta il controllo di velocità/posizione con comunicazione RS485 o CAN e include il monitoraggio della temperatura del motore per l'integrazione del sistema in progetti di robotica e automazione.
Caratteristiche principali
- Motore DC brushless K Series a media-alta velocità; motori servo
- Motore servo FOC ad alte prestazioni
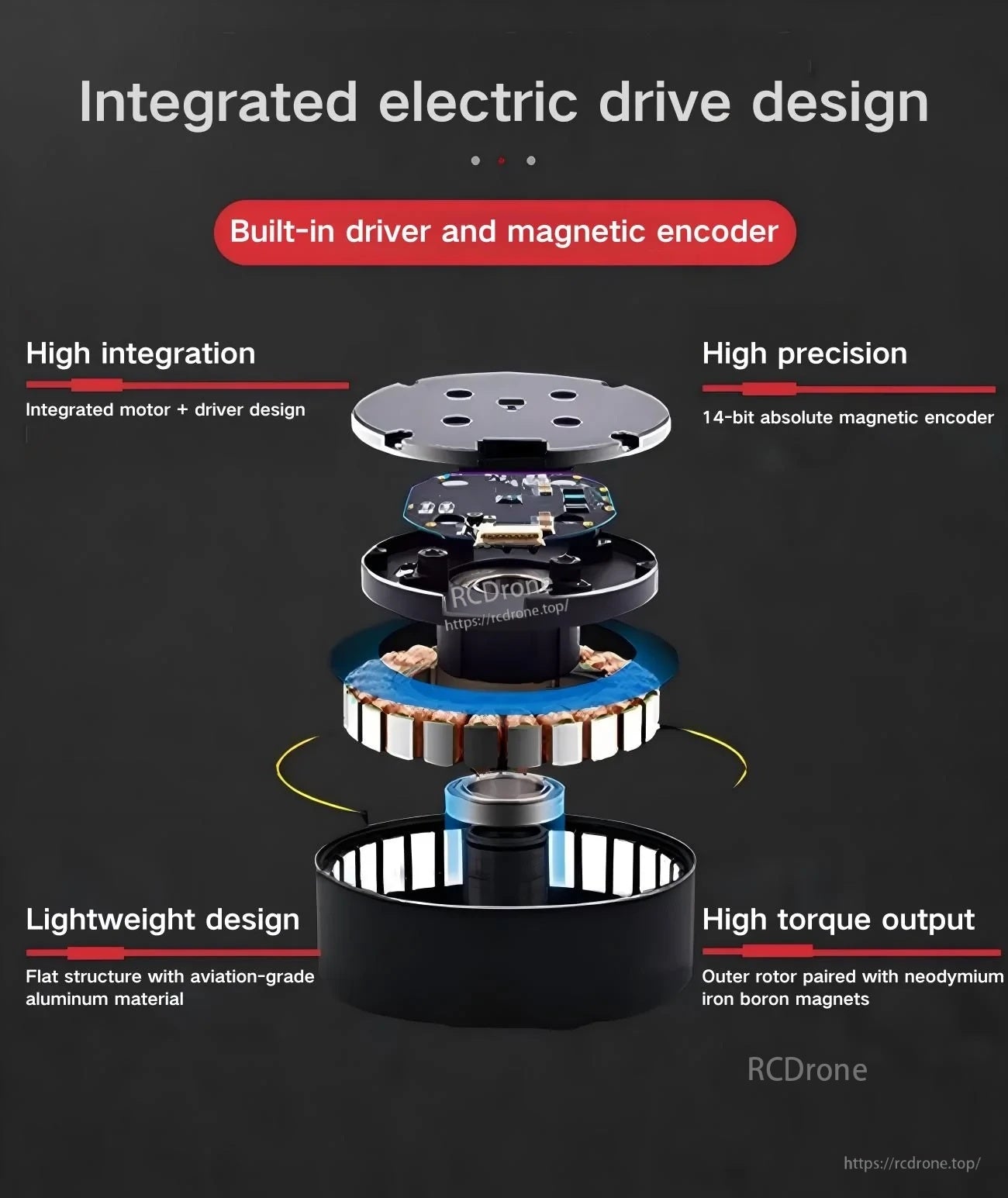
- Design del drive elettrico integrato: driver e encoder magnetico integrati (motore + driver integrato)
- Aggiornamento della precisione dell'encoder notato: da 14-bit a 18-bit; encoder magnetico assoluto a 18-bit a singolo giro con calibrazione una tantum (posizione zero mai persa)
- Coppia di cogging del motore ottimizzata
- Ingresso PWM supportato
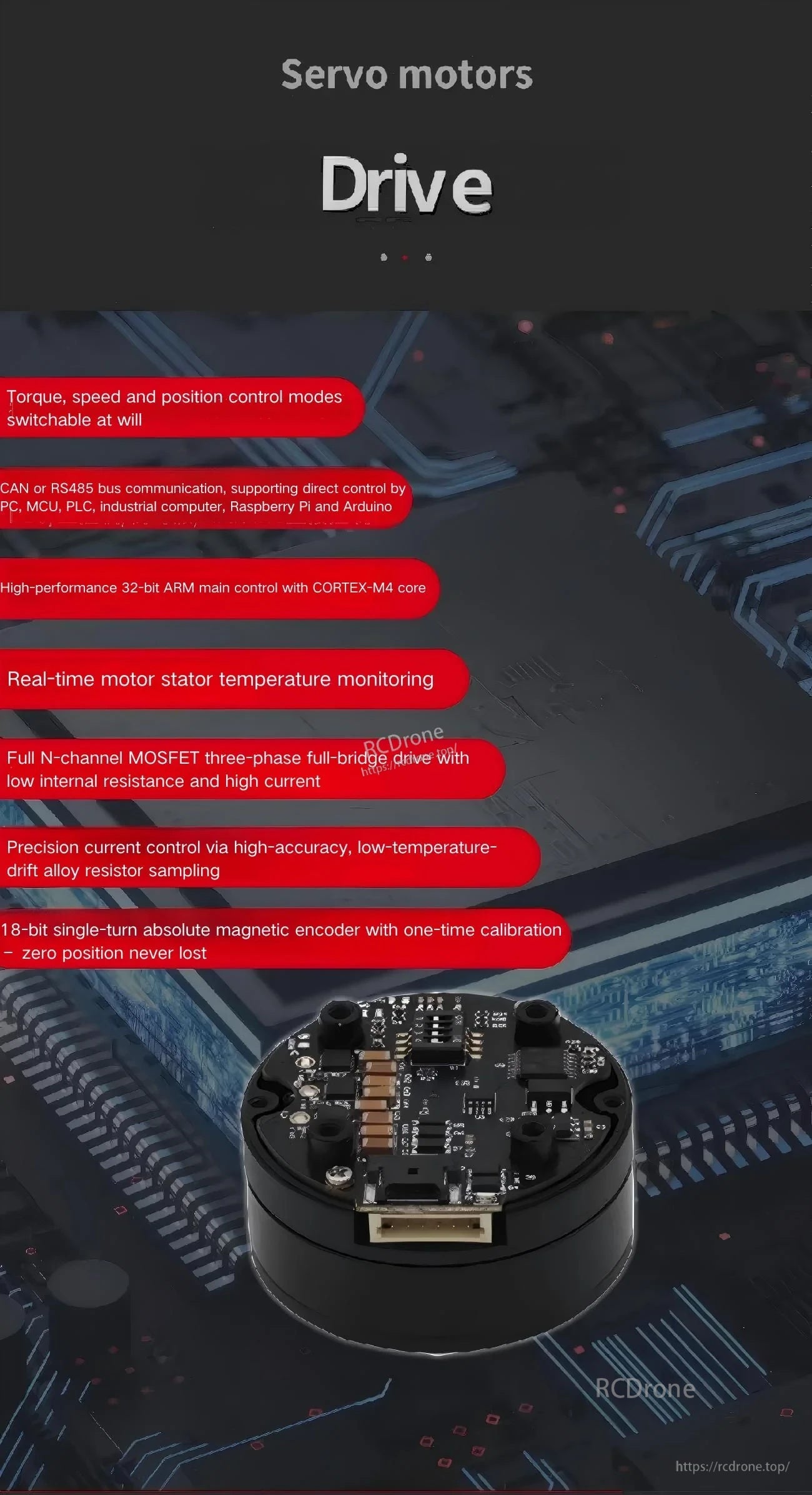
- Modalità di controllo di coppia, velocità e posizione intercambiabili
- Comunicazione bus CAN o RS485; compatibile con piattaforme di sviluppo open-source tra cui PC, MCU, PLC, computer industriale, Raspberry Pi e Arduino
- Controllo principale ad alte prestazioni a 32-bit ARM con core CORTEX-M4
- Monitoraggio in tempo reale della temperatura dello statore del motore
- Drive a ponte completo trifase con MOSFET N-channel completo con bassa resistenza interna e alta corrente
- Controllo di corrente di precisione tramite campionamento di resistori in lega ad alta precisione e bassa deriva termica
Specifiche
| Modello | K9050 (16T/35T) |
| Tensione nominale | 24V |
| Corrente nominale | 7.45A / 3.46A |
| Potenza di Picco | 170W / 38W |
| Momento Torcenti Nominale | 2.42 N.m / 2.79 N.m |
| Momento Torcenti di Picco | 4.5 N.m / 5.8 N.m |
| Velocità nominale | 490 rpm / 130 rpm |
| Encoder | 18bit |
| Inerzia del rotore | 4656 gcm² |
| Monitoraggio della temperatura del motore | SÌ |
| Modalità di controllo | Velocità/Posizione |
| Protocollo di comunicazione | RS485 o CAN |
| Dimensioni complessive | Φ89mm x 53mm |
| Peso | 963 g |
Interfaccia (Note sui pin del connettore CAN/RS485)
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Alimentazione negativa |
| V+ | Alimentazione positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | Segnale GND |
Etichettato anche: INTERRUTTORE ID e CAN/RS485 .
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
- Robot di ispezione
- Camera portatile
- LiDAR
- Gimbal pod
Manuali / Documenti
Per controlli di compatibilità o supporto all'integrazione (cablaggio RS485/CAN, regolazione dei parametri e selezione della modalità di controllo), contattare il supporto a https://rcdrone.top/ o inviare un'email a [email protected] .
Dettagli

Un motore servo 24V FOC compatto progettato per robotica e automazione, con elettronica di guida integrata e feedback dell'encoder assoluto.
La costruzione integrata di motore + driver semplifica il cablaggio e mantiene il attuatori leggero per installazioni compatte.
Cambia tra controllo di coppia, velocità e posizione, e connettiti tramite CAN o RS485 con monitoraggio della temperatura integrato per un'integrazione più sicura.

Etichettatura chiara dei pin per il cablaggio del bus CAN/RS485, ingresso di alimentazione, linee UART e l'interruttore ID a bordo per supportare configurazioni multi-nodo.
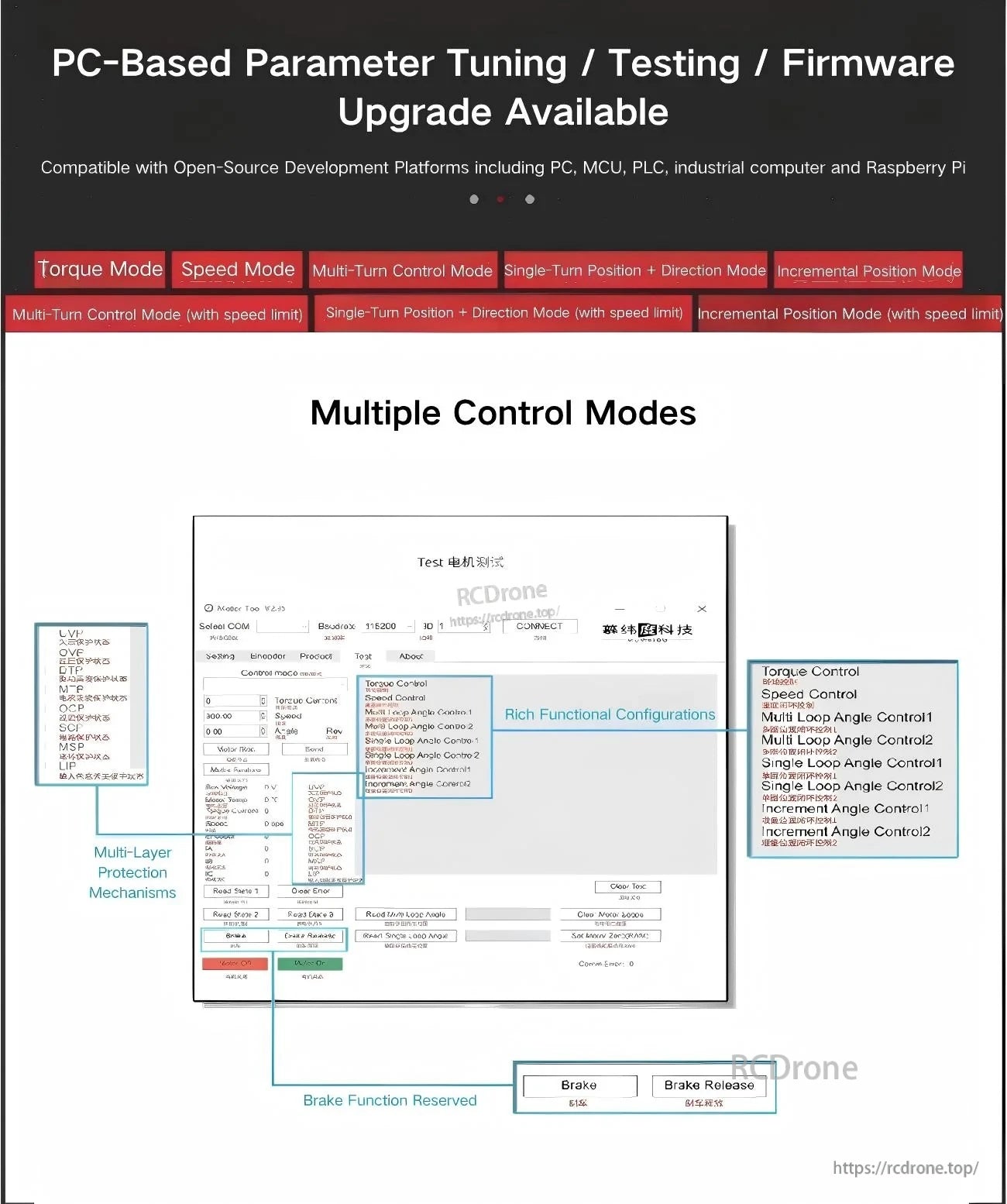
Il supporto software per PC aiuta ad accelerare la messa in servizio con la regolazione dei parametri, test e aggiornamenti del firmware attraverso più modalità di controllo.
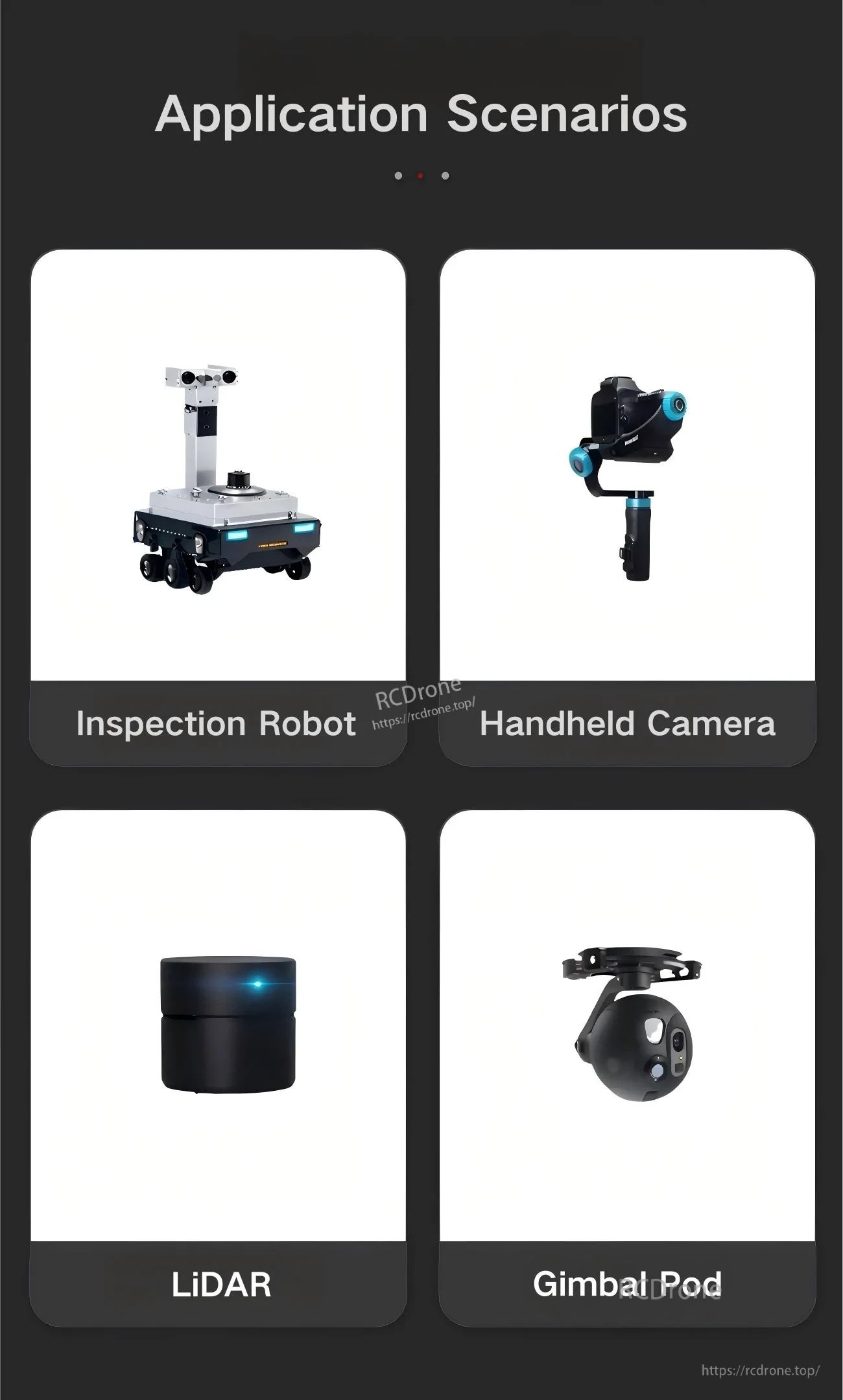
Progettato per progetti di controllo del movimento che vanno da robot di ispezione mobili a piattaforme per telecamere e sensori stabilizzati.
Related Collections

