

MUWEIDU L3526 Motore 12V Mini Servo, Encoder 15-bit, Controllo Velocità/Posizione RS485 per Robotica
MUWEIDU L3526 Motore 12V Mini Servo, Encoder 15-bit, Controllo Velocità/Posizione RS485 per Robotica
MUWEIDU
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU L3526 Motore è un mini servomotore in una serie di motori DC senza spazzole a bassa velocità e alta precisione, progettato per applicazioni di azionamento elettrico integrate che richiedono un funzionamento stabile e fluido. Supporta il controllo della velocità/posizione e utilizza la comunicazione RS485.
Caratteristiche principali
- Serie di motori DC brushless a bassa velocità e alta precisione (mini servomotori)
- Funzionamento stabile e fluido
- Monitoraggio della temperatura del motore: SÌ
- Risponde ai requisiti di controllo della posizione a bassa velocità e alta precisione
- Design del rotore esterno a più stadi appiattito che offre una coppia maggiore, ideale per applicazioni con spazio limitato
- Struttura brushless combinata con cuscinetti ad alte prestazioni garantisce una rotazione più fluida e una vita utile più lunga
- Resistori in lega ad alta precisione e bassa deriva termica realizzano un campionamento e controllo della corrente accurati
- Drive a ponte completo trifase N-channel presenta bassa resistenza interna e alta uscita di corrente
- Supporta il passaggio senza soluzione di continuità tra modalità di controllo della coppia in open-loop, velocità e posizione
Specifiche
| Modello | L3526 |
| Tensione nominale | 12V |
| Corrente nominale | 0.79A |
| Potenza di picco | 6.4W |
| Coppia nominale | 0.05 N.m |
| Coppia di picco | 0.13 N.m |
| Velocità nominale | 1250 rpm |
| Encoder | 15 bit |
| Inerzia del rotore | 58 gcm² |
| Monitoraggio della temperatura del motore | SI |
| Modalità di controllo | Velocità/Posizione |
| Protocollo di comunicazione | RS485 |
| Dimensioni complessive | Φ35 mm × 26 mm |
| Peso | 50 g |
Applicazioni
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Manuali
Per assistenza nella selezione, supporto all'integrazione o domande sulla documentazione, contattare [email protected] or visita https://rcdrone.top/.
Dettagli

I mini servomotori compatti sono progettati per movimenti a bassa velocità e alta precisione, dove un funzionamento fluido e stabile è importante.

Un design di azionamento integrato combina una struttura a rotore esterno, cuscinetti di qualità e rilevamento di corrente accurato per un'uscita di coppia controllata.
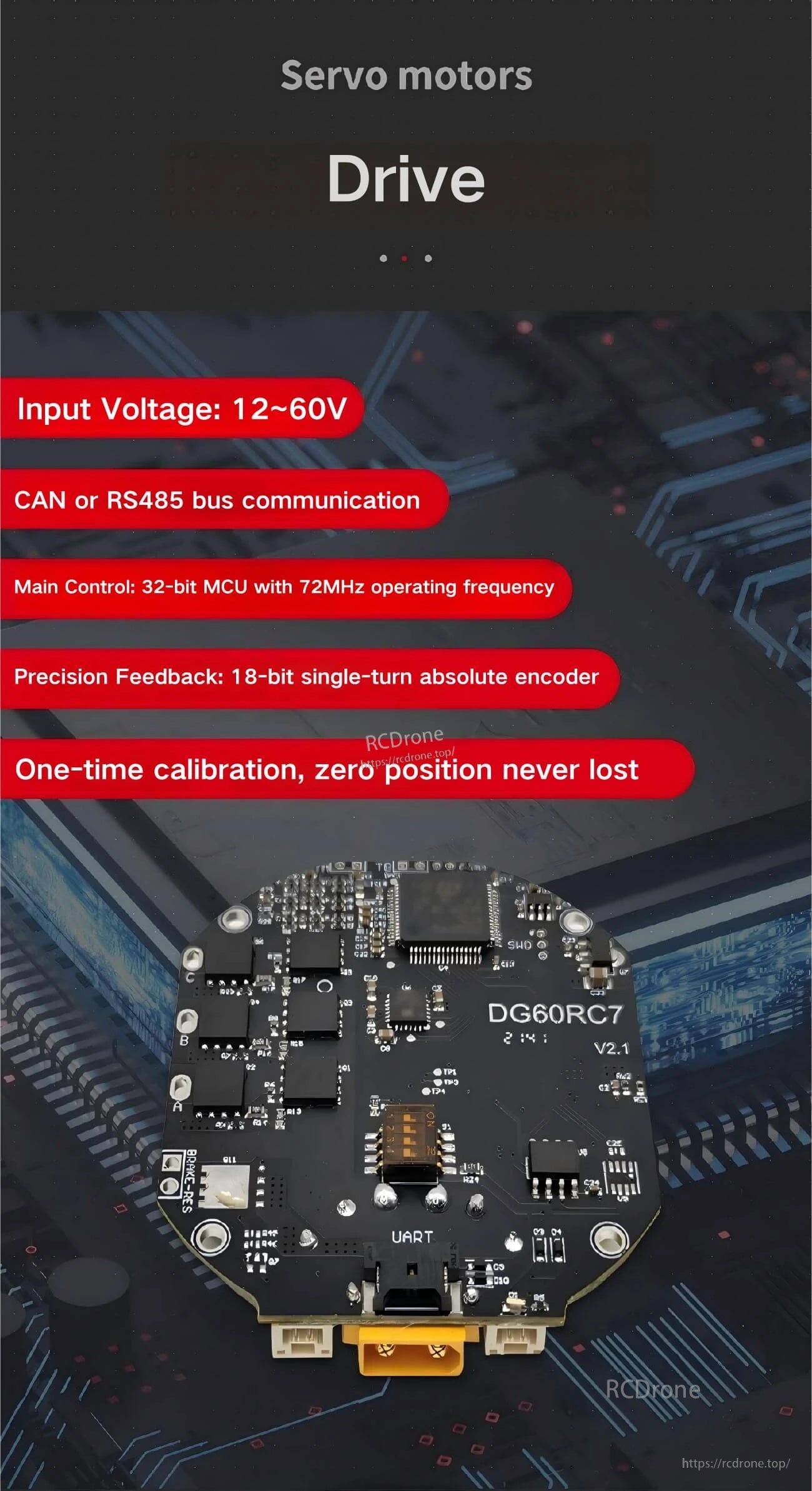
La comunicazione RS485 e l'elettronica di controllo a bordo supportano comandi di velocità/posizione con feedback dell'encoder per il controllo del movimento in anello chiuso.

Il cablaggio rimane semplice con una porta CAN/RS485 etichettata, un interruttore ID per la configurazione del bus e definizioni chiare dei pin per alimentazione e segnale.
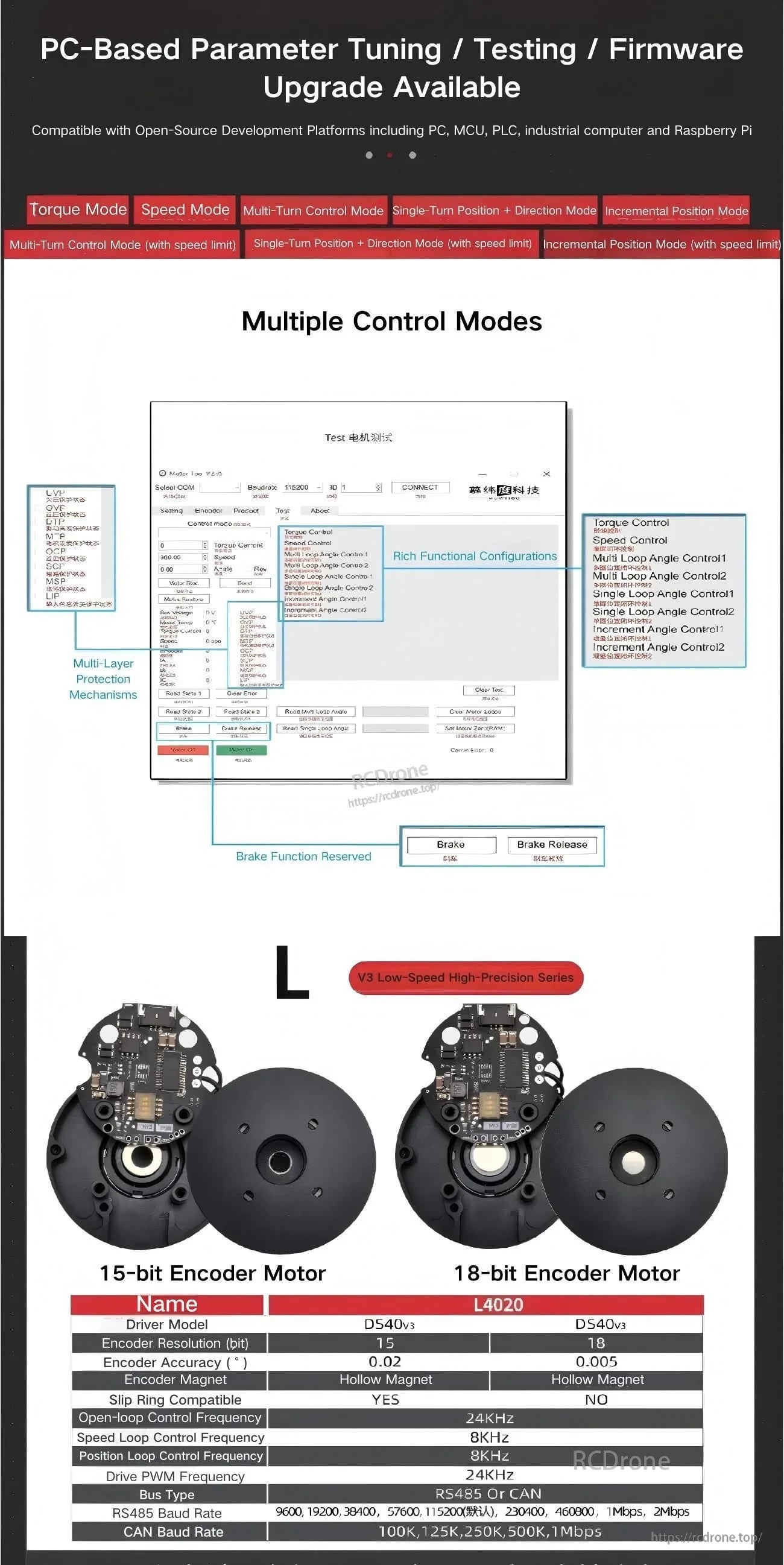
Strumenti basati su PC consentono la regolazione dei parametri, test e aggiornamenti del firmware, con più modalità di controllo disponibili per diverse attività di movimento.

Related Collections

