

MUWEIDU L5020 Motore Mini Servo 16V 500rpm 0,18N.m RS485/CAN Encoder 15-bit/18-bit 99g
MUWEIDU L5020 Motore Mini Servo 16V 500rpm 0,18N.m RS485/CAN Encoder 15-bit/18-bit 99g
MUWEIDU
Prezzo di listino
$180.00 USD
Prezzo di listino
Prezzo scontato
$180.00 USD
Prezzo unitario
per
Imposte incluse.
Spese di spedizione calcolate al check-out.
Impossibile caricare la disponibilità di ritiro
Panoramica
MUWEIDU Il motore L5020 è un mini servo motore progettato per il controllo di posizione a bassa velocità e alta precisione. Supporta modalità di controllo della velocità/posizione e fornisce comunicazione RS485 o CAN, con feedback dell'encoder opzionale a 15 bit o 18 bit e monitoraggio della temperatura del motore.
Caratteristiche principali
- Serie di motori DC brushless ad alta precisione a bassa velocità&
- Mini motori servo
- Design a albero cavo
- Operazione stabile & fluida
- Certificato CE
- Alta precisione integrata
- Costruzione leggera; elevate prestazioni di coppia
- Progettato secondo standard ultra-alti
- Risponde ai requisiti di controllo della posizione a bassa velocità e alta precisione
- Fogli di acciaio al silicio di alta qualità e magneti permanenti ad alte prestazioni resistenti alle alte temperature sono adottati come materiali principali del motore
- Design a rotore esterno multi-stadio appiattito che offre una coppia più elevata, ideale per applicazioni con spazio limitato
- Struttura brushless combinata con cuscinetti ad alte prestazioni garantisce una rotazione più fluida e una vita utile più lunga
- Resistori in lega ad alta precisione e bassa deriva termica realizzano un campionamento e controllo della corrente accurati
- Full N-channel tre fasi ponte completo presenta bassa resistenza interna e alta uscita di corrente
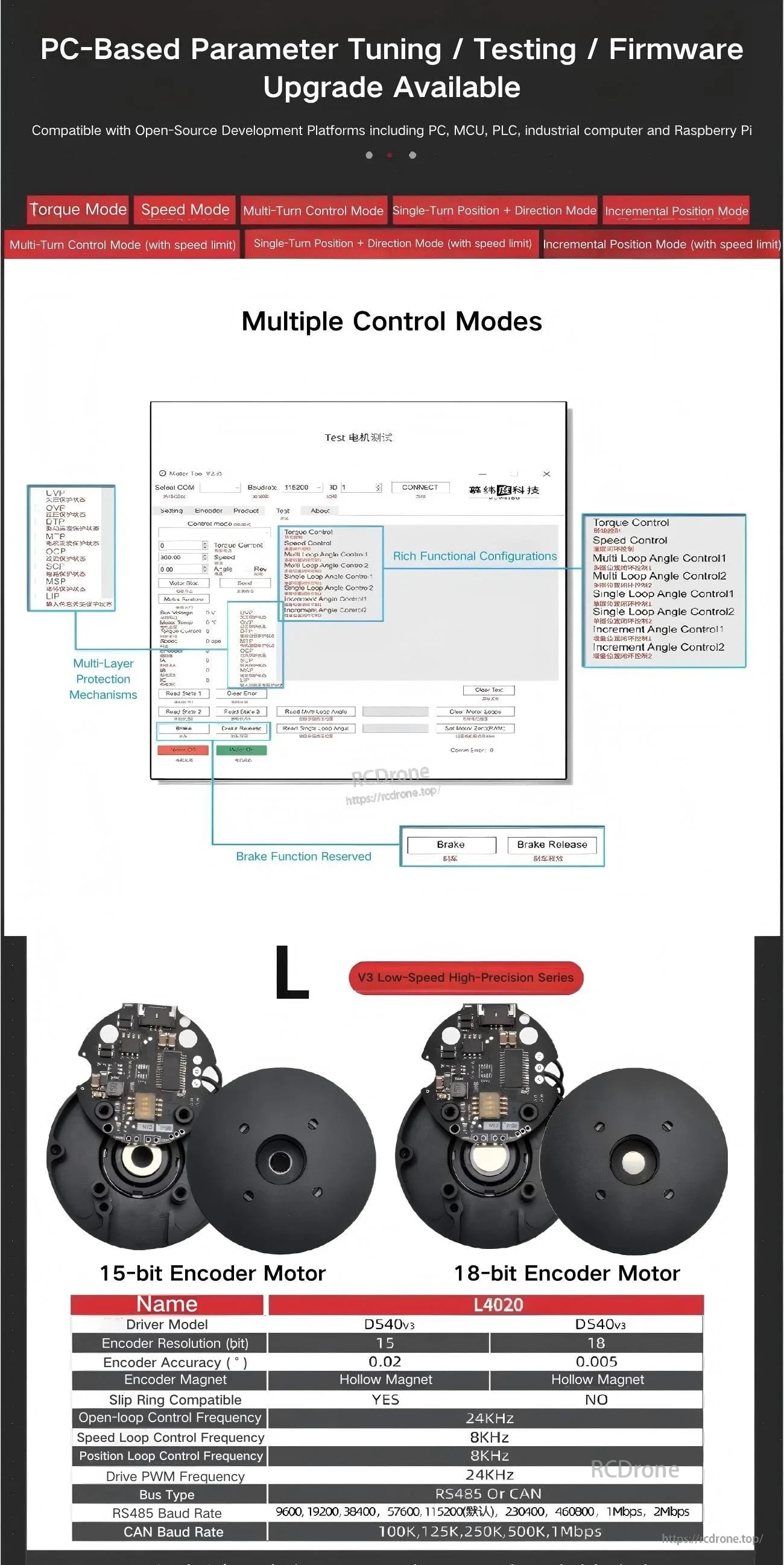
- Supporta il passaggio senza soluzione di continuità tra modalità di controllo della coppia in anello aperto, velocità e posizione
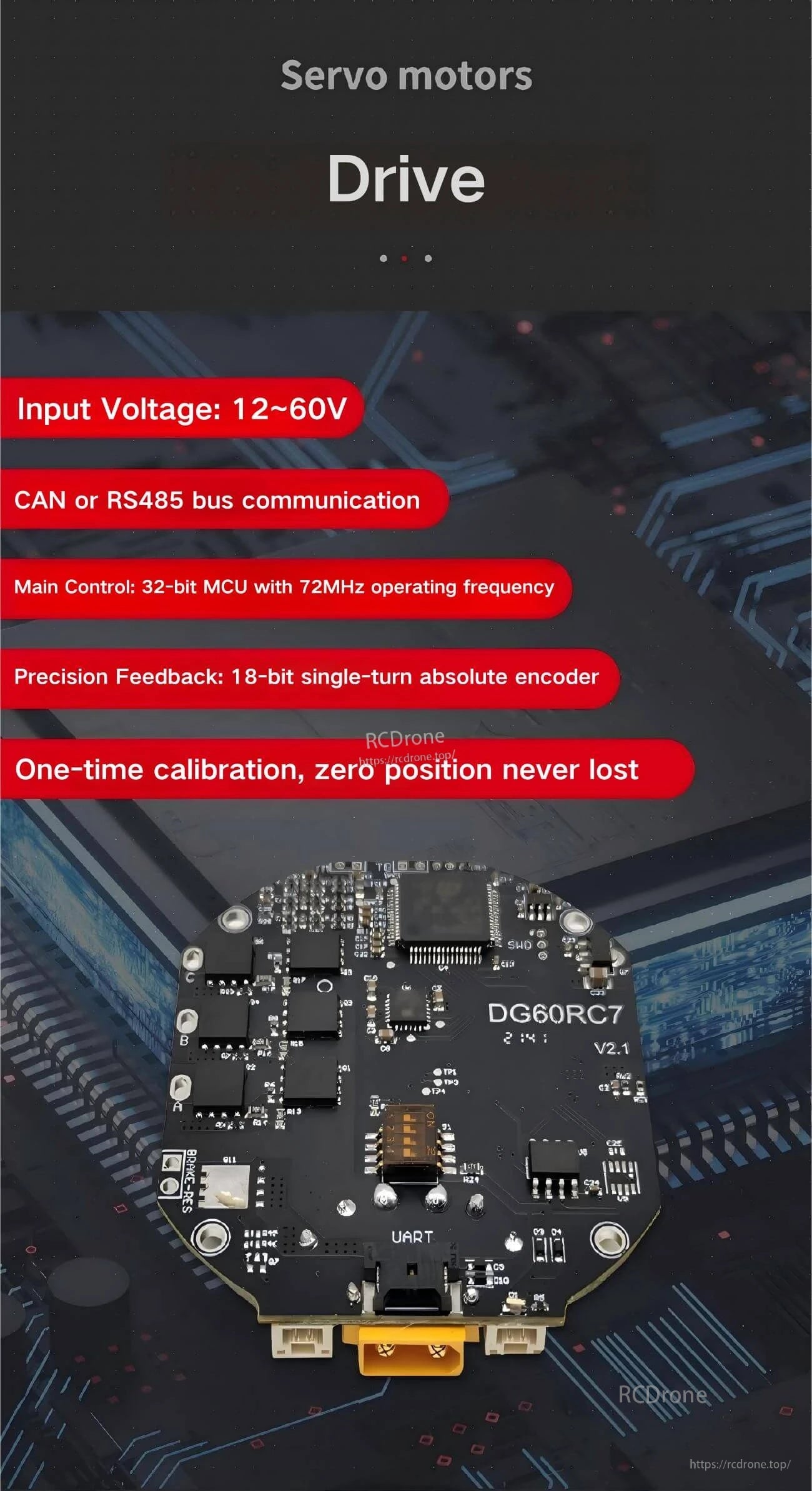
- Caratteristiche del drive: Tensione di ingresso 12~60V; comunicazione bus CAN o RS485; Controllo principale: MCU a 32 bit con frequenza operativa di 72MHz; Feedback di precisione: encoder assoluto a singolo giro a 18 bit; calibrazione una tantum, posizione zero mai persa
Scenari di applicazione
- Robot umanoidi
- Bracci robotici
- Eseoscheletri
- Robot quadrupedi
- Veicoli AGV
- Robot ARU
Specifiche
| Modello | L5020 |
| Tensione nominale | 16V |
| Corrente nominale | 0.8A |
| Potenza di Picco | 6.7W |
| Momento Torcentale Nominale | 0.18N.m |
| Momento Torcentale di Picco | 0.28N.m |
| Velocità Nominale | 500rpm |
| Encoder | 15bit o 18bit |
| Inerzia del Rotore | 136gcm^2 |
| Monitoraggio della Temperatura del Motore | YES |
| Modalità di Controllo | Velocità/Posizione |
| Protocollo di Comunicazione | RS485 o CAN |
| Dimensioni Complessive | Φ49mm×23.9mm |
| Peso | 99g |
Interfacce
- ID SWITCH
- CAN/RS485
| B/L | RS485-B o CAN-L |
| A/H | RS485-A o CAN-H |
| V- | Alimentazione Negativa |
| V- | Alimentazione Negativa |
| V+ | Alimentazione Positiva |
| V+ | Alimentazione Positiva |
| T | Trasmettitore UART |
| R | Ricevitore UART |
| G | GND Segnale |
Per supporto pre-vendita e integrazione, contattare https://rcdrone.top/ o inviare un'email a [email protected].
Manuali
Dettagli




Related Collections

